
技术摘要:
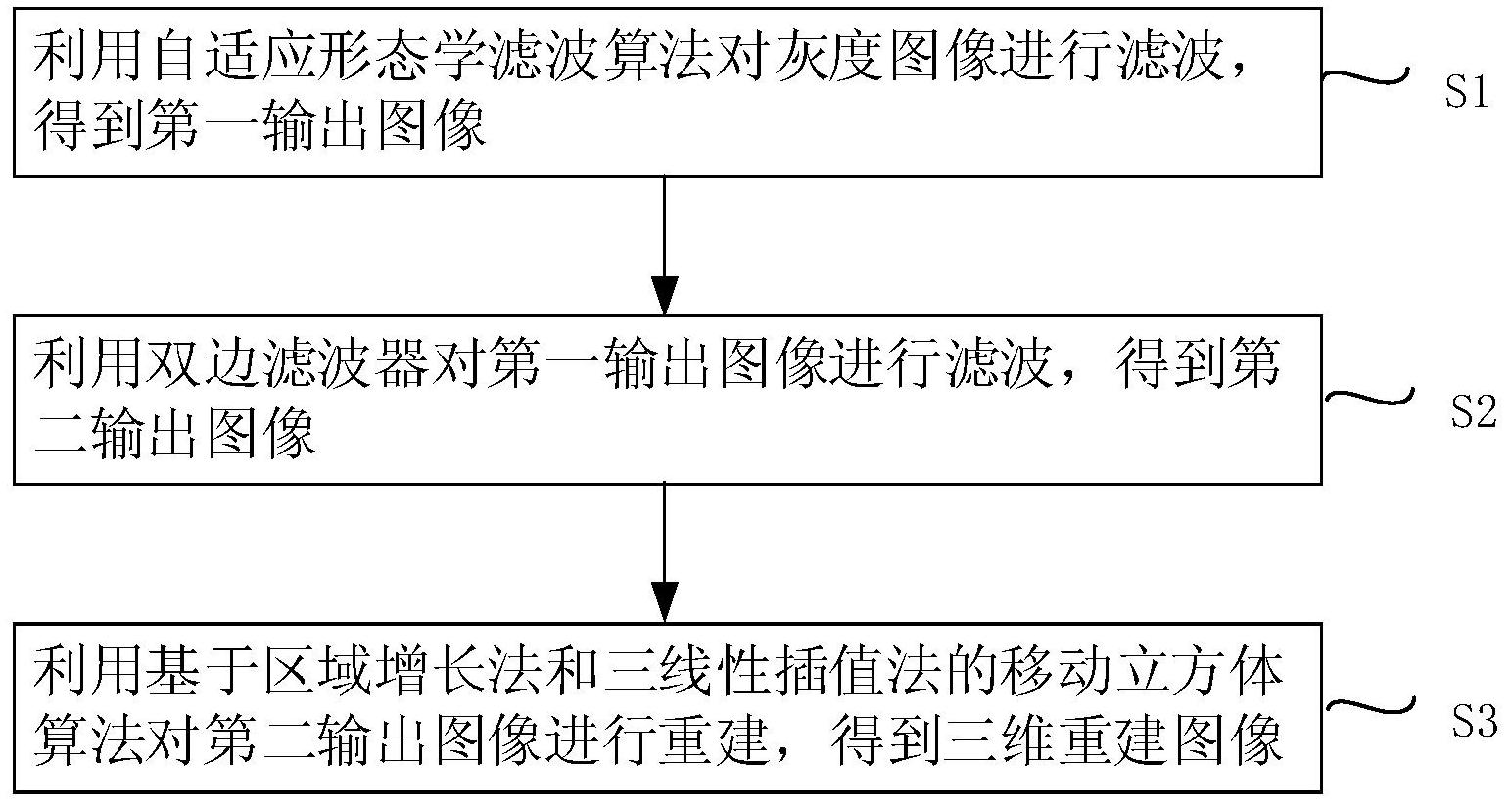
本发明涉及一种噪声CT图像三维重建方法,包括步骤:S1、利用自适应形态学滤波算法对灰度图像进行滤波,得到第一输出图像;S2、利用双边滤波器对第一输出图像进行滤波,得到第二输出图像;S3、利用基于区域增长法和三线性插值法的移动立方体算法对第二输出图像进行重建 全部
背景技术:
随着医学数字成像技术的飞速发展及其在临床诊断中的广泛应用,计算机断层 (Computed Tomography,CT)图像的三维重建技术在医学辅助诊疗工作中凸显了其优势,取 得了巨大的进展。比起二维断层图像来说三维重建后的图像更加立体真实,在医学图像领 域它能更加直观清晰的直达病灶部位进行分析,为临床医学实际操作提供有效途径。与此 同时,医学界迫切希望CT三维重建的实时性和精确性能进一步提高,以提高医疗诊断的准 确性。 医学图像的三维重建和可视化是科学可视化的重要研究领域,在成像和传输过程 中,CT图像会受到许多因素的影响,例如散焦模糊的电子辐射检测效果、检测器的数量和间 距、帧的几何形状、重构算法等。噪声直接影响CT图像的密度分辨率和空间分辨率,而且使 CT图像的三维重建精度大大降低,对临床分辨病灶带来极大干扰。 目前常用的CT去噪方法可分为投影域方法、迭代重建方法和后处理方法三大类。 Balda提出的结构自适应滤波和Manduca提出的双边滤波是两种有效的投影域去噪方法,但 是该类算法在对投影数据进行降噪处理的过程中易引起数据不一致、过校正或欠校正现 象,经重建后可能会将新的噪声或伪影引入图像中。Liu J提出的一种3D字典学习正则化方 法和Ding提出的基于压缩感知的方法是两种典型的迭代重建算法,但这类算法的缺点是计 算复杂度高、耗时长,在临床应用中有很大的局限性。
技术实现要素:
为了解决现有技术中存在的上述问题,本发明提供了一种噪声CT图像三维重建方 法。本发明要解决的技术问题通过以下技术方案实现: 本发明实施例提供了一种噪声CT图像三维重建方法,包括步骤: S1、利用自适应形态学滤波算法对灰度图像进行滤波,得到第一输出图像; S2、利用双边滤波器对所述第一输出图像进行滤波,得到第二输出图像; S3、利用基于区域增长法和三线性插值法的移动立方体算法对所述第二输出图像 进行重建,得到三维重建图像。 在本发明的一个实施例中,步骤S1包括: S11、获取所述灰度图像; S12、设定包括形状序列和尺寸序列的结构元素集Anm,其中,Anm={A11,A12,A13,…, A21,A22,…,Anm},n代表形状序列,m代表尺寸序列, 并利用所述结构元素集中的相同尺寸、不同形状的结构元素腐蚀所述灰度图像, 根据所述结构元素可填入所述灰度图像的次数自适应确定不同形状的结构元素的权重值: 5 CN 111739139 A 说 明 书 2/11 页 ... 其中,α1,α2,…,αn为不同形状的结构元素权重值,β1,β2,…,βn为不同形状的结构 元素可填入灰度图像的次数; S13、对同一形状的所述结构元素,按尺寸从小到大的顺序将所述结构元素对所述 灰度图像形态学处理的过程进行排序,构成串联滤波器; S14、结合所述权重值,按所述结构元素的不同形状将所述串联滤波器进行并联, 构成复合滤波器,并利用所述复合滤波器对所述灰度图像进行滤波,得到所述第一输出图 像: F(x)=∑αifi(x) 其中,fi(x)为串联滤波器对灰度图像的滤波结果,αi为权重值;i=1,2,…,n。 在本发明的一个实施例中,步骤S2包括: S21、获取基于空间距离的高斯权重区域滤波器: 其中,c(ξ,x)为基于空间距离的高斯权重,h(x)为输出图像,f(ξ)为输入图像,ξ为 邻域中心x的附近点,kd(x)为归一化因子, S22、获取基于像素间相似度的边缘滤波器: 其中,h(x)为输出图像,f(ξ)为输入图像,ξ为邻域中心x的附近点,s(f(ξ) ,f(x)) 为基于像素相似度的高斯权重,kr(x)为归一化因子, S23、将所述高斯权重区域滤波器与所述边缘滤波器结合,得到所述双边滤波器: 其中,h(x)为输出图像,f(ξ)为输入图像,ξ为邻域中心x的附近点,k(x)为归一化 因子, c(ξ,x)为基于空间距离的高斯权重, 且有d(ξ,x)=d(ξ-x)=||ξ-x||,σd为基于距离的正态分布标准差,s 6 CN 111739139 A 说 明 书 3/11 页 ( f (ξ) ,f ( x ) ) 为 基 于 像 素 相似 度的 高 斯 权 重 , 且 有 σr为基于空间的正态分布标准差; 并利用所述双边滤波器对所述第一输出图像进行滤波,得到所述第二输出图像。 在本发明的一个实施例中,步骤S3包括: S31、根据所述第二输出图像创建多维数据集,并从所述多维数据集中随机选取种 子体素; S32、以所述种子体素的邻域体素为目标区域,利用所述区域增长法提取所述目标 区域中包含等值面的所有体素; S33、根据所述体素中顶点的第一灰度值与所述等值面的第二灰度值的关系,确定 所述等值面在每个所述体素中的剖分方式; S34、采用所述三线性插值法计算在所述剖分方式下所述等值面与每个所述体素 的交点位置; S35、判断是否遍历所有包含所述等值面的体素;若是,则得到所述三维重建图像; 若否,则跳转至步骤S31。 在本发明的一个实施例中,步骤S31包括: 扫描所述第二输出图像中相邻的两个二维图像,根据其中一个所述二维图像上的 四个相邻像素与另一个所述二维图像上的四个相邻像素创建所述多维数据集,并利用二次 取样方法从所述多维数据集中选取包含所述等值面的所述种子体素。 在本发明的一个实施例中,步骤S32包括: 以所述种子体素的邻域体素为目标区域,利用区域增长法判断所述目标区域中是 否包含所述等值面,若是,则跳转步骤S33,若否,则跳转步骤S31。 在本发明的一个实施例中,利用区域增长法判断所述目标区域中是否包含所述等 值面,包括: 获取所述种子体素与所述邻域体素的公共面的四个顶点的灰度值; 判断所述四个顶点的灰度值与预设阈值的关系;当所述四个顶点的灰度值同时大 于或者小于所述预设阈值时,则所述邻域体素中不包含所述等值面;当所述四个顶点的灰 度值不是同时大于或者小于所述预设阈值时,则所述邻域体素中含所述等值面。 在本发明的一个实施例中,步骤S33包括: 判断所述第一灰度值和所述第二灰度值的关系,当所述第一灰度值大于或等于所 述第二灰度值时,则所述顶点位于所述等值面之外,当所述第一灰度值小于所述第二灰度 值时,则所述顶点位于所述等值面之内; 根据所述体素中所有所述顶点与所述等值面的关系确定所述等值面在每个所述 体素中的剖分方式。 在本发明的一个实施例中,步骤S34包括: 根据所述剖分方式确定所述等值面与所述体素相交的体素棱边; 利用所述三线性插值法计算所述等值面与所述体素棱边的交点坐标: Vxyz=V000(1-x)(1-y)(1-z) V100x(1-y)(1-z) V010(1-x)y(1-z) V001(1-x)(1-y)z 7 CN 111739139 A 说 明 书 4/11 页 V101x(1-y)z V011(1-x)yz V110xy(1-z) V111xyz 其中,Vxyz为等值面的灰度值,V000,V100,V010,......,V111为体素中各个顶点的灰度 值; 由所述交点坐标得到所述等值面与每个所述体素的交点位置。 与现有技术相比,本发明的有益效果: 本发明的三维重建方法先利用自适应形态学滤波算法进行滤波,然后利用双边滤 波器进行滤波,将二者进行结合不仅能够平滑的对图像进行滤波,而且能够很好地保留图 像的边缘信息和几何信息,避免了将新的噪声或伪影引入图像中;同时,本发明利用基于区 域增长法和三线性插值法的移动立方体算法进行三维重建,区域增长发可以有效加快重建 效率,三线性插值法可以有效提高重建精度,复杂度低、耗时短,从而扩大了临床应用领域。 附图说明 图1为本发明实施例提供的一种噪声CT图像三维重建方法的流程示意图; 图2为本发明实施例提供的一种串联滤波器的结构示意图; 图3为本发明实施例提供的一种复合滤波器的结构示意图; 图4为本发明实施例提供的一种体素模型的示意图; 图5为本发明实施例提供的一种相邻体素等值面与棱边交点情况的示意图; 图6为本发明实施例提供的一种等值面与体素中一个面的交点情况的示意图; 图7为本发明实施例提供的一种Marching Cubes算法的15种基本剖分方式的示意 图; 图8为本发明实施例提供的一种体素顶点和边的索引示意图; 图9为本发明实施例提供的一种单元立方体坐标示意图。











