
技术摘要:
一种基于路基填筑智能指挥系统的作业方法及其系统,该方法包括如下流程:施工准备、施工计划、填料作业、摊铺平整作业、压路机无人碾压作业、边坡修整作业和质量验收。该方法以路基智能填筑指挥系统为核心,综合BIM、大数据、北斗定位、自动化控制、信息化检测、物联网 全部
背景技术:
现有技术中,填方路基的施工工序与步骤按照三阶段、四区段、八流程的施工工艺 组织施工,如图1所示。 其中,三阶段包括准备阶段、施工阶段和整形验收阶段;四区段包括填土区段、平 整区段、碾压区段和检测区段;八流程包括施工准备、基底处理、分层填筑、摊铺平整、洒水 晾晒、碾压夯实、检测和路基整修。这是目前比较常用的传统填方路基的施工程序。 然而,在上述传统路基施工中,多采用人工测量放线辅助手段来控制路基摊铺、平 整、边坡整形。虽经过多年的实践,但在路基施工过程中精度、机械利用率、施工成本及效率 等方面均有待提高。 本发明基于上述问题,提出了一种基于路基填筑智能指挥系统的作业方法及系 统。
技术实现要素:
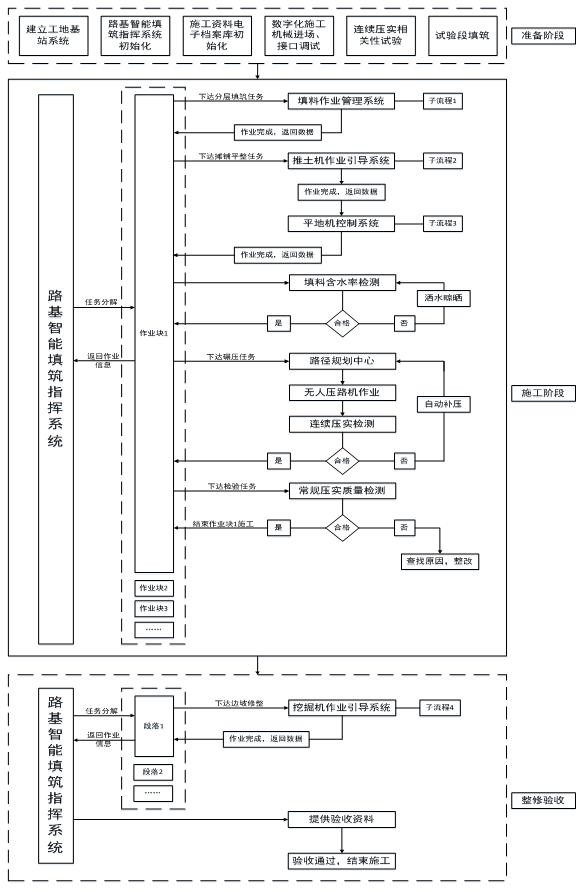
一种基于路基填筑智能指挥系统的作业方法及其系统,该方法包括如下流程:施 工准备、施工计划、填料作业、摊铺平整作业、压路机无人碾压作业、边坡修整作业和质量验 收。该方法以路基智能填筑指挥系统为核心,综合BIM、大数据、北斗定位、自动化控制、信息 化检测、物联网等理论和技术,实现在指挥系统统一调度下的填料运输动态管理、自动摊铺 引导、自动精平控制、无人驾驶碾压和边坡修整自动引导,实现路基压实质量连续检测、填 料级配与含水率的自动检测,形成了数字化、智能化的高速铁路路基填筑新技术;有效保证 路基填筑质量,提高了作业效率,改变了路基施工传统作业方式。 本发明的第一方面提供了一种基于路基填筑智能指挥系统的作业方法,包括如下 步骤: 施工准备:包括建立施工BIM模型、建立覆盖工地的统一北斗基站系统、资料库初始化、 路基指挥系统初始化、数字化施工机械接口调试和/或连续压实相关性试验; 施工计划:在路基指挥系统中BIM模型的辅助下,快速进行作业面划分,确定施工任务, 并利用指挥系统积累的大数据推衍所需填料方量、机械台班和人工工时;形成施工任务并 下发给各子系统,施工任务包含施工场地的设计断面、施工范围坐标、人机料需求、施工工 艺要求的信息; 填料作业:根据指挥系统下发的任务,采用填料作业管理子系统进行填料作业的系统 管理,对填料进行信息化管理,实现填料溯源、车辆调度及管理和方量精细化控制,作业数 据返回给指挥系统; 摊铺平整作业:根据指挥系统下发的任务,在自动摊铺引导子系统和自动精平控制子 5 CN 111593625 A 说 明 书 2/9 页 系统辅助下,实现填料的摊铺和平整,作业数据返回给指挥系统; 压路机无人碾压作业:根据施工要求自动规划路径,将作业任务下发至压路机无人碾 压子系统,实现自动碾压,碾压过程中进行压实质量连续检测,数据返回给指挥系统;指挥 系统对压实检测数据进行分析,针对不合格区域重新规划路径,下发补压任务;无人碾压子 系统接收补压任务并执行后返回数据,指挥系统再次判断压实质量是否合格,以此循环直 至检测合格; 边坡修整作业:在挖掘机三维引导子系统辅助下,实时观测当前边坡线与设计边坡线 的修整距离,实现边坡整形的精细化作业,作业数据返回给指挥系统; 质量验收:通过压实质量连续检测,选取薄弱点进行常规检测验证,以保证路基智能填 筑施工质量。 进一步的,所述施工准备的步骤包括: (1)建立北斗地面增强基站系统; (2)完成路基智能压实指挥系统初始化工作:建立BIM模型,结合施组实现模型划分;完 成模型属性导入工作;完成机械、车辆、人员信息录入;完成电子档案库数据的建立与报表 格式核对; (3)根据施工任务、管理目标制定数字化施工机械需求种类及数量,落实机械及配套系 统来源;完成设备进场、安装,调试并标定机械上安装的各种设备、传感器和控制系统,确保 各设备、传感器和控制系统能够协调统一运行;完成设备与指挥系统的接口调试,实现数据 互通;完成相关的人员操作培训; (4)根据试验场地情况、当地气候条件、填料情况、项目部机械设备配置情况,对填料含 水量、摊铺厚度与晾晒时间、碾压遍数、含水量与压实质量进行试验;通过试验段确定最佳 工艺参数,包括数字化施工机械组合方式、松铺厚度、压实遍数、填料最佳含水率及压实质 量连续检测控制值等,报监理工程师批准后作为控制指标,全面指导施工; (5)在试验段应启用路基智能施工指挥系统及全套数字化施工机械,完成全流程测试, 并完成压实质量连续检测相关性试验。 进一步的,所述填料作业的步骤包括: 管理员在指挥系统施工计划模块,将当天的分层填筑作业任务下发给填料管理子系 统,填料管理子系统根据作业块面积、填方高度、松铺系数估算所需土方量,填料调度员通 过填料运输管理APP将运送任务下发给车辆队,车辆队长在上接单后,根据导航将填料运送 到指定作业块,由收料员现场在APP上点击验收,核实填料种类、方量,完成验收; 填料验收完成后,相关作业信息自动返回给指挥系统,该作业块进入下一工序施工。 进一步的,所述摊铺平整作业的步骤包括: 采用推土机摊铺初平,平地机终平; 管理员在指挥系统施工计划模块将准备进行摊铺平整的作业任务下发给推土机作业 引导子系统,推土机操作员接收任务后根据引导驾驶推土机到指定作业块,按照任务中给 定的区域、松铺厚度、坡度信息,在作业系统引导下作业; 初平完成后推土机操作员将任务传递给平地机,平地机操作员同样在控制子系统引导 下完成终平,作业完成后操作员将作业数据上传返回给指挥系统,该作业块进入下一工序 施工。 6 CN 111593625 A 说 明 书 3/9 页 进一步的,在压路机无人碾压作业前还包括洒水晾晒的步骤: 根据施工计划,管理员在指挥系统施工计划模块将含水率待检作业任务下发给填料含 水率自动检测子系统,操作员在监测系统上接收任务后按引导前往作业块,将压路机调至 静压档位,启动系统对作业块进行全面检测; 指挥系统自动分析含水率检测数据,当填料含水率低于工艺要求,将洒水任务下发给 洒水机子系统,下发任务包括洒水区域和洒水量,操作员在导航引导下驾驶洒水机进行精 准作业;当填料含水量较高时,指挥系统下发命令推迟压路机进场,同时下发翻晒任务包括 晾晒区域和晾晒时间,作业队伍根据下发任务进行翻晒; 洒水或翻晒结束后,指挥系统调度操作员驾驶压路机进行含水率复核; 含水率检测结果通过后,操作员在子系统将相关信息上传返回给指挥系统,该作业块 可进入下一工序施工。 进一步的,所述压路机无人碾压作业的步骤包括: 完成洒水晾晒工序的作业块进入指挥系统,根据施工计划,将当天要碾压的作业任务 发送给压路机无人驾驶子系统,任务中包含规划好的碾压路径、碾压参数、碾压遍数和作业 区域坐标等信息; 压路机无人驾驶子系统在接到任务后,按照规划路径自行碾压,并在这一过程中进行 压实质量连续检测,检测数据上传至指挥系统;指挥系统对检测数据进行分析、判断,如合 格则结束碾压,不合格则规划补压路径对不合格区域进行针对性补压,压路机无人驾驶子 系统接收、执行补压任务后再次返回作业数据;指挥系统对补压数据进行再次评判,如不合 格则再次规划补压任务直至检测合格,同时提交异常项,请求操作员分析本次补压不合格 的原因。 进一步的,在作业过程中,可在指挥系统上查看压路机的作业区域、作业面积、动 态碾压路径、碾压遍数、压实质量连续检测值(VCV)和高程信息,并根据作业数据重新规划 碾压路径等工艺参数。 进一步的,所述质量验收的步骤包括: 在填筑过程中,采用连续压实控制;每层填土压实后,使用土方测量放样子系统按照指 挥系统下发的坐标对中线、标高、宽度、压实厚度进行复核,在指挥系统选择的薄弱区域位 置进行常规压实质量检测,压实质量连续检测、常规检测均合格才可填筑上一层。 进一步的,所述边坡修整作业的步骤包括: 路基填筑施工完成后,管理员在指挥系统施工计划模块将作业任务下发给挖掘机作业 引导系统,系统根据BIM设计为操作员提供三维空间引导,实现精准施工。 本发明的第二方面提供了一种基于路基填筑智能指挥系统,包括:路基施工指挥 系统、填料作业管理子系统、摊铺平整作业子系统、压路机无人碾压子系统、边坡修整作业 子系统和质量验收子系统; 所述路基施工指挥系统用于建立BIM模型,结合施组实现模型划分;完成模型属性导入 工作;完成机械、车辆、人员信息录入;完成电子档案库数据的建立与报表格式核对; 所述填料作业管理子系统进行填料作业的系统管理,对填料进行信息化管理,实现填 料溯源、车辆调度及管理和方量精细化控制; 所述摊铺平整作业子系统包括自动摊铺引导子系统和自动精平控制子系统,以实现填 7 CN 111593625 A 说 明 书 4/9 页 料的摊铺和平整; 所述压路机无人碾压作业子系统根据施工要求自动规划路径实现分层填筑自动碾压; 所述边坡修整作业包括挖掘机三维引导子系统,实时观测当前边坡线与设计边坡线的 修整距离,实现边坡整形的精细化作业; 所述质量验收子系统通过压实质量连续检测,选取薄弱点进行常规检测验证,以保证 路基智能填筑施工质量。 进一步的,所述指挥系统根据填料、摊铺平整、无人碾压、边坡修整各工序返回的 作业数据,并收集天气、环境等影响因素,补充、完善形成路基智能填筑作业大数据库,以指 导后续的施工计划制定。 综上所述,本发明提供了一种基于路基填筑智能指挥系统的作业方法及其系统, 该方法包括如下流程:施工准备、施工计划、填料作业、摊铺平整作业、压路机无人碾压作 业、边坡修整作业和质量验收。该方法以路基智能填筑指挥系统为核心,综合BIM、大数据、 北斗定位、自动化控制、信息化检测、物联网等理论和技术,实现在指挥系统统一调度下的 填料运输动态管理、自动摊铺引导、自动精平控制、无人驾驶碾压和边坡修整自动引导,实 现路基压实质量连续检测、填料级配与含水率的自动检测,形成了数字化、智能化的高速铁 路路基填筑新技术;有效保证路基填筑质量,提高了作业效率,改变了路基施工传统作业方 式。 本发明提出的路基施工方法相比于现有方法具有以下优点: 1.全新的施工方式、施工更容易、更高效,使作业标准化,管理信息化、施工作业数字 化。 2.指挥系统根据填料、摊铺平整、无人碾压、边坡修整各工序返回的作业数据,并 收集天气、环境等影响因素,不断补充、完善形成路基智能填筑作业大数据库,在后续的施 工计划制定中,根据施工环境、机械、人工的变化对施工计划进行更加准确的推衍 3.高精度作业,无需测量放样,避免施工返工,同时减少测量人员和辅助施工人员数 量,减少燃料使用。 4.可以24小时全天候施工,缩短工期和提高施工质量。 5.降低劳动强度和安全风险。 6.保障施工全过程质量。 附图说明 图1为现有技术中路基施工方法的流程示意图; 图2为本发明实施例的路基智能填筑施工方法的流程示意图; 图3为本发明实施例的填料作业管理的流程示意图; 图4为本发明实施例的摊铺平整作业的流程示意图;图5为本发明实施例的推土机作业 引导示意图; 图6为本发明实施例的平地机作业引导示意图; 图7为本发明实施例的挖掘机作业引导示意图; 图8为本发明实施例的路基智能填筑施工系统的结构框图; 图9为本发明实施例的填料作业管理子系统的结构框图。 8 CN 111593625 A 说 明 书 5/9 页











