
技术摘要:
本发明提供了一种大视场CT成像重建方法,包括以下步骤:S1、通过将物理探测器设置在不同位置,物体放在转台上,物理探测器在每一个位置采集得到相应位于成像平面上的数据,将得到的数据拼接融合为成像平面上的一块矩形区域内的数据;物理探测器在每个位置采集数据时, 全部
背景技术:
锥束CT检测的视场取决于探测器的大小。在实践中,有很多需要CT检测的物体直 径大,超出标准CT扫描能够提供的最大视场,这些物体以航空领域为多。中国专利文献(专 利申请号分别为:CN200610012217 .X,CN200710175588 .4,CN200910091282 .X,CN 104597061A)分别对锥束大视场重建进行了公开。CN200610012217.X公开了一种能达到三 倍标准扫描视场的CT成像方法,该方法采用重排技术将锥束数据处理为平行束数据,降低 了成像的分辨率,占用内存多,计算速度慢,更为重要的是锥束数据并不能重排成若干共面 的倾斜平行束数据。专利CN200710175588.4中的方法,由于采用微分运算,增大了图像的噪 声,而且不能在纵向上得到更大的视场。CN200910091282.X公开了一种探测器偏置的大视 野锥束X射线倾斜扫描三维数字成像方法,最大能将视场扩大为标准扫描视场的两倍。 CN104597061A公开了一种基于虚拟探测器的大视场CT成像方法,该方法是目前唯一在实践 中可行的可以在横向和纵向上都可以扩大视场的方法,但它并未能在非螺旋扫描下,在纵 向上达到最大视场,而且对探测器数据的处理不够实用,重建未充分考虑探测器和转台的 位置对成像质量的影响。
技术实现要素:
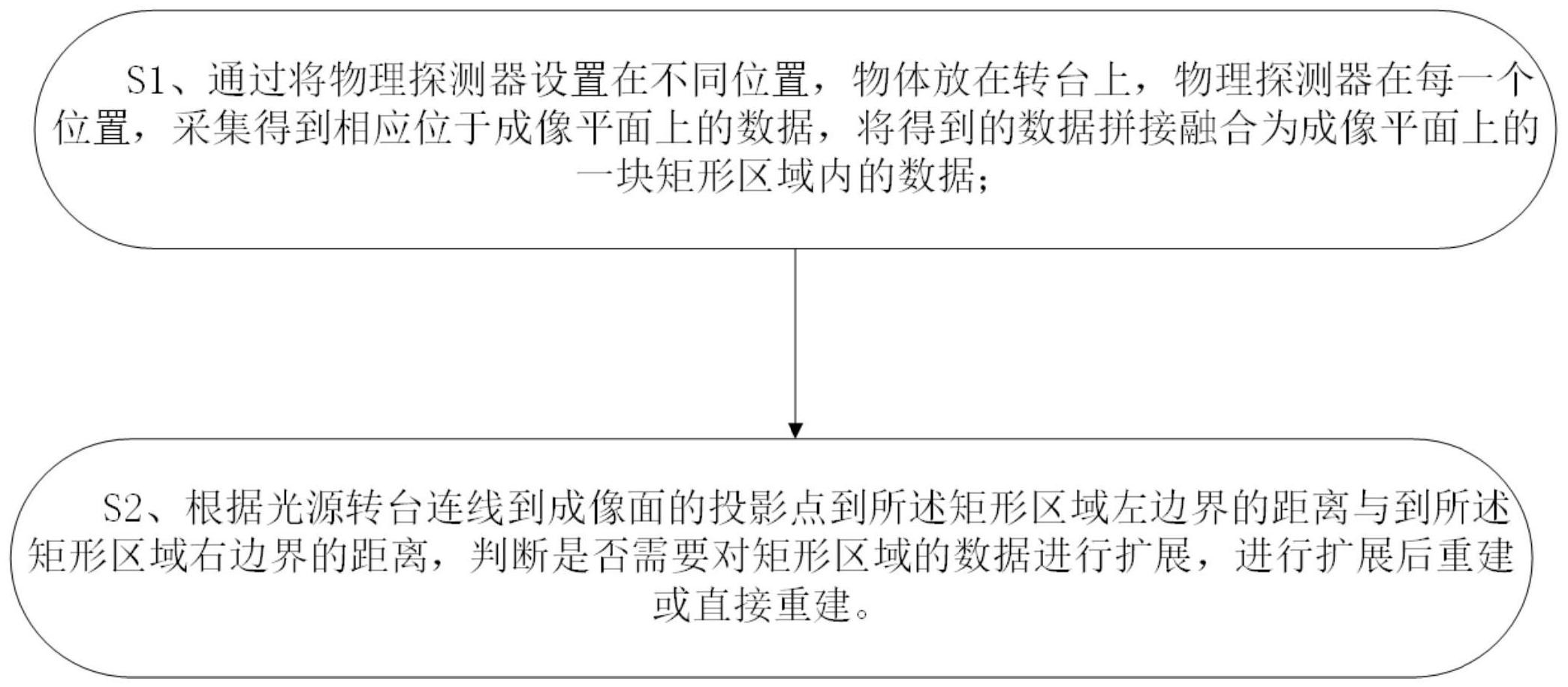
针对上述存在的问题,提供了一种探测器的布置方式灵活,对探测数据的处理适 应实践的需要,重建方式具有广泛适应性的大视场CT成像重建方法。 本发明采用的技术方案如下:一种大视场CT成像重建方法,包括以下步骤: S1、通过将物理探测器设置在不同位置,物体放在转台上,物理探测器在每一个位 置采集得到相应位于成像平面上的数据,将得到的数据拼接融合为成像平面上的一块矩形 区域DRRect内的数据;物理探测器在每个位置采集数据时,转台做M周旋转,每个位置上对 应的转台的旋转模式相同;螺旋模式下,M大于1,非螺旋模式下,M等于1; S2、若光源与转台连线到成像面的投影点到所述矩形区域左边界的距离等于到所 述矩形区域右边界的距离,则直接对矩形区域DRRect内的数据进行FDK重建; 若投影点到所述矩形区域左边界的距离大于到所述矩形区域右边界的距离,将矩 形区域向右拓展,再对拓展后的矩形区域DRRect内的数据进行FDK重建; 若投影点到所述矩形区域左边界的距离小于到所述矩形区域右边界的距离,将矩 形区域向左拓展,再对拓展后的矩形区域DRRect内的数据进行FDK重建。 进一步的,步骤1中,探测器在数据采集前进行校正处理,具体包括:探测器在整个 采集数据过程中仅进行一次暗场校正和坏像素校正,探测器在每个位置单独都进行亮场校 正。 进一步的,所述探测器位置设置于成像平面上得到成像平面上的数据或设置于其 4 CN 111595875 A 说 明 书 2/6 页 他位置通过反透射变换得到相应位于成像平面上的数据。 进一步的,探测器采集的数据在拼接融合前进行矩形化处理,所述矩形化处理具 体包括:对每次探测器采集变换到成像面上的数据取矩形区域DRRectAux,得到探测器采集 的矩形区域DRRectAux数据,所述矩形区域面积小于矩形区域DRRect,且四条边与矩形区域 DRRect的四条边平行。 进一步的,对于探测器采集的数据矩形化处理前还需对物理探测器上的数据进行 切边处理,所述切边处理为将探测器边缘的像素切除,切掉的像素列数或行数大于等于0。 进一步的,所述步骤1中,在探测器采集的数据进行拼接融合后还需进行硬化校 正。 进一步的,所述拼接融合的具体方法为:相邻的矩形数据存在重叠区域和非重叠 区域,非重叠区域的数据直接采用原数据,重叠区域数据进行拼接融合处理;两两相邻的重 叠部分的数据值为左右相邻重叠区域数据值的加权和,两加权系数和为1,由左至右,左边 探测器数据的加权系数从1连续单调变为0,右边探测器数据的加权系数从0连续单调变为 1;上下相邻重叠区域的拼接融合和左右相邻处理方式同理。 进一步的,若光源剂量有波动或在采集数据的过程中,探测器的探测性能有变化, 需要对相邻的探测器数据进行亮度均衡处理。 进一步的,所述矩形区域DRRect向右拓展的具体方法为:定义矩形区域横边长为 AxisRectLong,竖边长为AxisRectShort;拓展后的矩形区域横边长为AxisRectLongNew,竖 边长不变;光源和转台连线在成像面的投影点到矩形区域DRRect左边界距离与到矩形区域 DRRect右边界距离的差值向下取整为Temp; 对于拓展后的矩形区域数据,0-Temp区域内的数据直接拷贝矩形区域DRRect0- Temp区域内的数据,Temp-AxisRectLong区域内的数据为矩形区域DRRect内Temp- AxisRectLong区域内的数据加权处理之后的数据,AxisRectLong-AxisRectLongNew区域内 的数据值为0; 所述矩形区域DRRect向左拓展的方式与向右拓展方式同理。 进一步的,所述矩形区域DRRect确定方法为:光源与转台的连线到成像面的投影 点在所述矩形区域DRRect的内部,投影点到区域DRRect边界的距离的最大值对应的边界应 能满足,物体成的像和该边界不相交。 与现有技术相比,采用上述技术方案的有益效果为:不仅可以在横向纵向上扩大 视场,还可以得到高质量的CT重建图像,重建方法更灵活,将转台偏移重建,探测器偏移重 建,标准重建统一到一个框架下处理,充分考虑了成像过程中,光源不稳定,探测器探测效 率变化,探测器坏像素,硬化现象,几何参数等因素对成像质量的影响,相比基于重排和BPF 的方法,具有重建质量高,重建速度快,占用内存少的优点。 附图说明 图1为本发明的CT扫描流程图。 图2为本发明的CT扫描的结构示意图。 图3为本发明的CT扫描结构的俯视图。 5 CN 111595875 A 说 明 书 3/6 页











