
技术摘要:
一种地月时延下月面探测准实时遥操作系统,包括月面任务操作现场、地面控制中心和天地传输链路;月面任务操作现场包括月面移动机器人和月面环境;月面移动机器人上配置有多套测量传感器;月面环境包括月面地形地貌和光照条件;月面任务操作现场通过天地传输链路实时接 全部
背景技术:
由地面操控人员遥操作月面移动机器人是月面探测的重要方式,而月面地形环境 复杂未知,且存在较大的不确定性,这将对月面移动机器人的遥操作任务带来比较大的挑 战。由于地月之间距离传输时延和传输带宽的限制,使得在轨数据无法实时传输到地面上, 地面操控人员也就无法直接根据月面机器人的运动状态和月面地形图像数据实时操控机 器人。因此,世界上如苏联的“徒步者”和我国的“玉兔号”等已实现的无人月球车月面探测 任务都采用Move-Wait-Watch”即“移动-等待-监视”的阶段目标遥操作策略:在当前移动周 期内,地面人员根据遥测下传的多幅月球车周围的局部图像进行拼接和可通过性分析,并 通过自主或人工生成遥操作指令、且生成的操作指令经地面充分验证后才上传到天上执 行,从而确保月面探测的安全性。这种“走走停停”的探测方式使得月球车一个月昼周期(约 一个月)内仅能移动几十米,月面探测效率非常低。因此,这样的遥操作方式对于未来月球 表面大范围野外未知环境探测、甚至是建设无人月球基地任务来说显然是不够的。
技术实现要素:
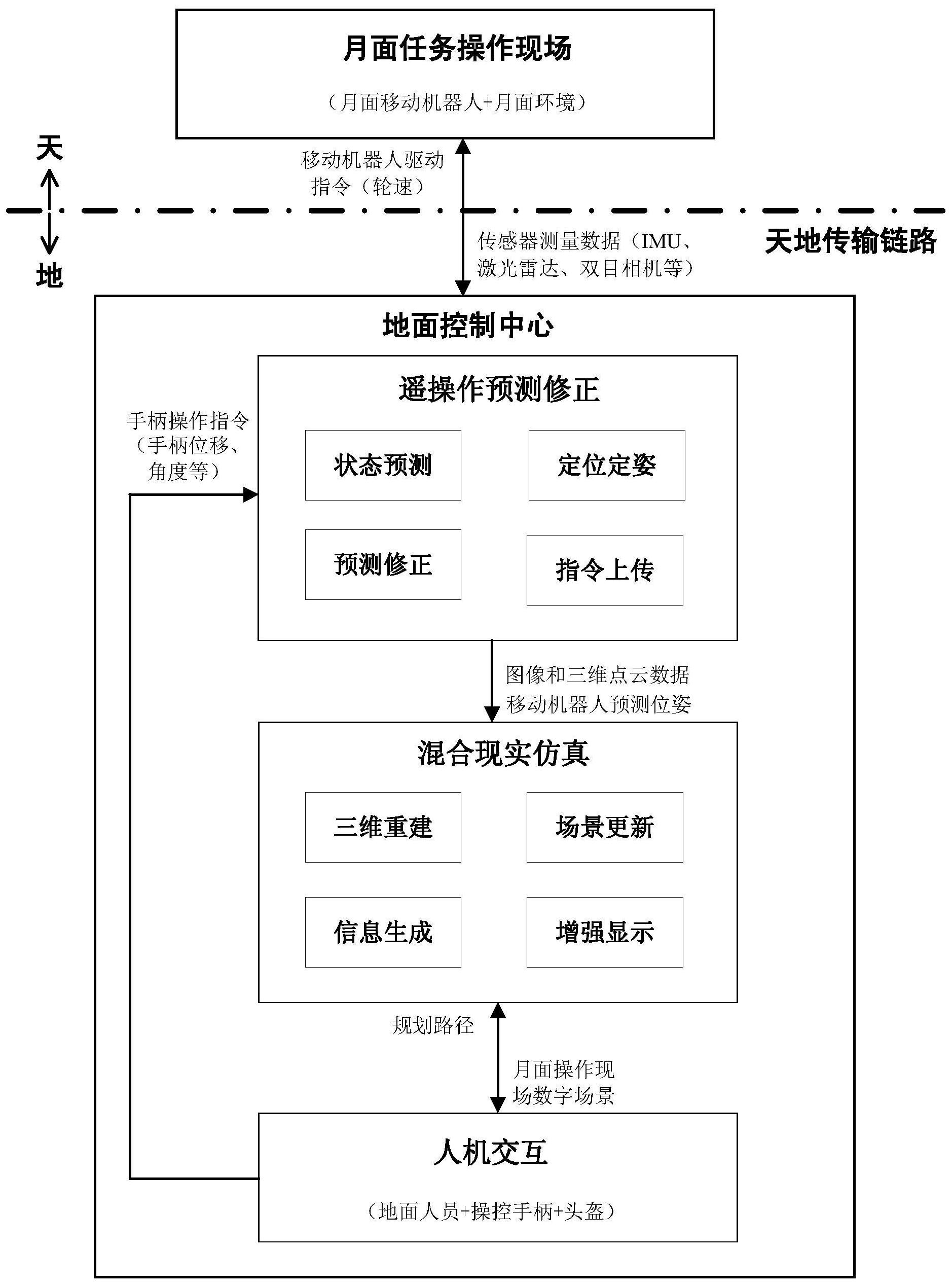
本发明解决的技术问题是:针对目前地月时延遥操作巡视探测走走停停、效率低 下的不足,提出一种基于移动机器人状态预测修正和虚实场景匹配仿真相结合的月面探测 准实时遥操作系统,解决了地月时延期间月面机器人运动状态预测、虚实场景准实时匹配 以及月面操作现场虚拟现实实时仿真问题,确保地月遥操作的实时性和准确性,提高探测 效率。 本发明的技术方案是:一种地月时延下月面探测准实时遥操作系统,包括月面任 务操作现场、地面控制中心和天地传输链路三部分, 月面任务操作现场:包括月面移动机器人和月面环境;其中,月面移动机器人上配 置有多套测量传感器,包括用于月面成像的全景相机,用于局部月面成像的双目相机和激 光雷达,以及用于机器人位置姿态测量的惯性测量单元IMU;月面环境包括月面地形地貌和 光照条件;月面任务操作现场通过天地传输链路实时接收地面控制中心遥控上传的遥操作 指令,驱动月面移动机器人按指令移动,并通过天地传输链路将月面移动机器人上的传感 器测量数据遥测下传到地面控制中心; 天地传输链路:负责地面控制中心与月面任务操作现场之间的信息交互,即进行 地面控制指令的遥控上传和月面任务操作现场测量数据的遥测下传; 地面控制中心:负责地月时延下月面移动机器人的运动状态预测修正以及地面遥 操作和指令解析上传,生成的遥操作指令经由天地传输链路到达月面任务操作现场,实时 驱动月面移动机器人进行移动探测。 4 CN 111580519 A 说 明 书 2/7 页 所述地面控制中心包括遥操作预测修正子系统、混合现实仿真子系统和人机交互 子系统;其中,遥操作预测修正子系统负责在地月时延过程中对月面移动机器人的未来运 动状态进行预测,并根据延时下传的IMU测量数据和图像数据对状态预测结果进行修正,预 测修正结果作为混合现实仿真子系统的输入条件;混合现实仿真子系统负责构建月面任务 操作现场的虚拟任务场景,并根据月面移动机器人运动状态预测修正结果和遥测下传的图 像数据进行虚拟场景的更新和显示,构建的虚拟月面任务场景作为人机交互子系统的输入 条件;人机交互子系统负责地面遥操作和指令生成,地面操控人员根据虚拟月面任务场景 连续操控手柄,生成序列遥操作指令,并将指令发送给遥操作预测修正子系统,经由其进行 指令解析后遥控上传到月面任务操作现场。 所述遥操作预测修正子系统包括状态预测模块、定位定姿模块、预测修正模块和 指令上传模块;其中: 状态预测模块:建立月面移动机器人的运动状态预测模型,包括运动学和动力学 模型以及月面地形起伏的数学模型;每个遥操作周期Δt,状态预测模块以当前时刻月面移 动机器人的位置姿态和遥操作指令作为运动状态预测模型的输入,在月面遥测数据尚未下 传到地面的时间间隔内,通过数学计算获得月面移动机器人的位置姿态预测数据; 定位定姿模块:每个图像下传延时周期T,将月面上延时下传的双目相机和激光雷 达图像数据作为输入条件,结合T时间间隔内遥测下传的序列IMU位姿测量数据,利用即时 定位与建图方法SLAM获得传感器成像时刻月面移动机器人的精确位置姿态信息,作为预测 修正的精确初值; 预测修正模块:包括短周期预测修正子模块和长周期预测修正子模块;短周期预 测修正子模块在每个遥操作周期Δt内执行一次操作,长周期预测修正子模块在每个图像 下传延时周期T内执行一次操作;其中: 指令上传模块:将地面操控人员实时操作手柄产生的手柄位移、角度操作指令转 换成移动机器人可识别的轮速驱动指令,通过天地传输链路遥控上传给月面移动机器人。 所述短周期预测修正子模块:每个遥操作周期Δt,预测修正模块以延时下传的 IMU数据作为初值,自IMU数据开始下传时刻开始,根据状态预测模块中的预测模型和遥操 作指令进行计算,直至当前时刻;计算过程中,每个遥操作周期Δt得到的位置姿态数据即 为短周期预测修正后的位姿数据; 所述长周期预测修正子模块:每个图像下传延时周期T,预测修正模块以定位定姿 模块得到的成像时刻移动机器人精确位姿数据作为初值,自图像数据下传时刻开始,根据 状态预测模块中的预测模型和遥操作指令进行计算,直至当前时刻;计算过程中,每个遥操 作周期Δt得到的位置姿态数据即为长周期预测修正后的位姿数据。 所述混合现实仿真子系统包括三维重建模块、场景更新模块、信息生成模块和增 强显示模块;其中: 三维重建模块:利用遥测下传的移动机器人周围大范围月面地形图像数据和已知 的月面移动机器人外形结构数据,对月面任务操作现场进行三维重建,构建起包括虚拟月 面地形和虚拟移动机器人在内的虚拟月面任务场景;所述大范围月面地形图像数据通过月 球轨道器上的高分辨率相机和移动机器人上配置的全景相机、双目相机和激光雷达获取; 场景更新模块:根据遥操作预测修正子系统获取的移动机器人预测修正的位姿数 5 CN 111580519 A 说 明 书 3/7 页 据并结合双目相机和激光雷达在移动机器人本体的安装指向,实时更新显示当前时刻的虚 拟月面任务场景;同时,根据延时下传的移动机器人周围局部精细月面图像数据,细化更新 对应区域的虚拟月面任务场景; 信息生成模块:在三维重建获取虚拟月面任务场景的同时,对虚拟场景中的突起、 凹坑等障碍特征进行三维测量并记录,根据移动机器人外形尺寸和越障能力,分析不同障 碍特征的危险程度并进行标识;同时,利用地面操控人员对虚拟月面任务场景的认知规划 一条参考行进路径;将障碍特征的三维数据、危险程度等信息称为增强信息,连同参考行进 路径一起统称为引导信息; 增强显示模块:将信息生成模块获取的增强信息和行进路径信息准确显示在虚拟 月面任务场景中。 所述人机交互子系统包括地面操控人员和操作手柄;人机交互子系统通过三维重 建的虚拟月面任务场景和操作手柄搭建起地面操控人员与月面任务操作现场之间的互动 关系,由地面操控人员根据实时更新的虚拟月面任务场景,人工控制操作手柄实现对虚拟 移动机器人、即对月面移动机器人的连续遥操作。 本发明与现有技术相比的优点在于: (1)现有月球车“移动——等待”遥操作采用串行控制方式,地面人员等待机器人 在轨运动状态和月面图像数据都下传到地面后才进行图像拼接、可通过性分析并生成遥操 作规划指令;本发明采用并行控制方式,即在等待机器人在轨运动状态和月面图像数据下 传过程中,同时对机器人运动位姿进行预测。这样一来,机器人位姿预测结果通过下传至地 面的真实运动状态和月面图像数据进行精确修正后,即可作为地面虚拟仿真的输入,使得 地面人员可实时且准确地“看到”月面机器人在地月延时过程中的运动。 (2)现有月球车“移动——等待”遥操作采用多幅局部地形图像拼接的方式构建月 面移动机器人周围局部范围的平面图像,地面人员根据局部图像进行路径规划并生成操作 指令;本发明采用基于大范围三维重建的虚拟现实仿真技术,充分利用着陆器和月面移动 机器人上的敏感器获取不同范围和不同分辨率的月面图像进行三维重建,大范围场景和局 部精细地形互相补充,从而提高地面人员进行大范围任务规划和遥操作控制的全局性和准 确性。 (3)现有月球车“移动——等待”遥操作采用半开环方式,地面人员在上传遥操作 指令后,本执行周期(历时数小时甚至以天计算)内通过离线方式监视在轨状态,遥操作执 行误差只能等待下一个执行周期去修正,既降低了操作效率又易造成误差累积;本发明采 用遥操作误差实时闭环修正方式:在地月时延期间对月面移动机器人的运动状态进行预 测,并根据下传的在轨数据对预测误差进行定时修正,从而达到实时修正位姿误差、进而准 实时遥控月面移动机器人,提高探测效率和遥操作控制精度的目的。 附图说明 图1为地月时延下准实时遥操作系统组成与原理框图; 图2为地月时延下准实时遥操作工作流程。 6 CN 111580519 A 说 明 书 4/7 页











