
技术摘要:
本发明属于人工智能技术领域,公开了一种烟草施药控制方法、系统、存储介质、无人机,根据烟草生产的实际情况,采用油式多旋翼喷雾无人机;结合烟草不同时期的发育长势、流行病虫害和用药重点实际情况,按照不同生产季节采用移栽期执飞参数、团棵期执飞参数、现蕾期执 全部
背景技术:
目前,无人机植保施药机械的发展,逐渐成为了现代植保机械施药的一大重要发 展方向。无人机变量施药技术涵盖了传统的植保机械的变量施药技术和雾化特性控制技 术,还包含了速度采集技术,为无人机变量施药提供数据输入。对于航空施药技术发展较早 的包含美国、俄罗斯等国,其航空植保施药技术在研究领域和适用范围等多方面都处于领 先的水平。我国的无人机施药技术还不完善,包括变量喷洒技术、无人机监管机制等多方面 还迫待发展和改善。 无人机施药设备以其施药的高效率、效果的优越性、广泛的适用性逐渐成为航空 施药的重要研究方向。但是,当前我国使用无人机喷洒农药大多采用人为操作,因为在不同 的作业区域中,存在着不同的地形地貌,如种植区域过于陡峭、地块过于分散等问题,如果 采用现有技术自动喷洒,极易造成作业区域范围内施药量分布的不均匀,喷洒的作用效率 偏低等问题;当前我国对于特殊地形的转弯、避障等技术问题,还没有得到有效地解决;现 阶段采用的无人机从动力上主要分为电动式和油动式两种,无人机中没有飞行控制器也同 样需要无人机的专业飞手操作。飞手操作无人机相对于自动喷洒,有更强的机动性、更好的 环境适应性等优点。无人机作为结合电子科技和机械结构的高级技术产品,其操作具有较 高的复杂性和难度。目前,操作人员专业性不强、技术不熟练是造成无人机喷洒均匀性差, 甚至于飞行事故等问题的主要原因。随着我国农业在航空植保技术方面的不断发展,对无 人机植保在施药的精准性和作业效率上也提出了更高的要求。对于不同的作业地形、不同 的喷施对象、不同的喷施环境和不同的作业要求下,无人机喷洒的要求不同,为达到最佳的 防治效果以及不污染环境的要求,无人机的喷洒均匀性成为评价航空植保效果的一大主要 指标。植保无人机在作业过程中,飞行速度状态的变化会直接影响喷洒农药的均匀性和施 药的防治效果。所以在航空施药过程中,改善施药不均匀状况的关键就是解决无人机的速 度变化问题。 无人机在烟草上的应用,主要集中在烟田监测,即利用遥感方式监测烟田种植、病 虫害等情况。在药剂喷施防治病虫害方面,利用无人机防治烟蚜,可以提高农药喷洒效率, 作业均匀性、穿透性优于人工作业。烟叶种植过程中遇到的病虫害较多,包括烟蚜、烟青虫、 根茎类病害、叶斑类病害等等,合理做好农药的喷施,对于降低病虫害损失,解决烟叶农残 问题具有重要意义。无人机飞行匀速平稳,旋翼螺旋桨产生的下压气流可以掀开植物叶面, 有助于增加雾流对农作物的穿透性,使药液喷洒到植物根部,起到更好的防治效果。实施无 人机大规模统防统治,可以有效调控烟田小环境,不仅能够保证防治效果,而且还能有效控 制烟草病害,减少农药施用量,减少空气污染和土壤污染,降低烟叶农残。同时,植保无人机 在烟草上均用药量2kg/亩即可满足防效,而人工最低需要40kg水才能达到很好的防效,无 4 CN 111731481 A 说 明 书 2/9 页 人机施药可有效的减少了大田植保环节对水的需求量。我国烟区主要以丘陵、山地为主,地 块大小不一、不规则,使用无人机可以不受地形地貌限制,实现均匀作业,避免漏喷、重复喷 施。利用无人机飞防,需要专业技术人员,便于作业和安全培训,实现标准化作业,且作业人 员接触药液几率小,避免了农药对作业人员的危害。 目前,烟叶种植主体以1.33~3.67hm2为主,喷药主要依靠烟农自己或夫妻两人实 施,烟农不算自己的人工,认为利用无人机飞防收取费用增加成本。而且,无人机飞防后,烟 叶每平方厘米雾滴较人工喷施少,影响了烟农的认可程度。同时,无人机专业公司考虑成 本、折旧、效益等问题,亩服务费用高于或接近烟农人工喷药成本,不利于无人机飞防的大 面积推广。 作业不够及时,无人机飞防专业公司较少,不能满足烟田需求,遇到需要集中飞防 时不能及时开展作业,这样不仅降低了防治成效,打乱统防统治计划,也影响了市场信誉, 降低了烟农的信任。 防效存在空白区,无人机施药是在烟株上部作业,药液能够覆盖上部烟叶,但对中 下部烟叶的覆盖率较低,而赤星病、气候性斑点等烟草叶斑病害防治的重点正是中下部烟 叶。由于不能将药液有效覆盖到中下部烟叶,使得无人机施药技术存在很大的防效空白区 或无效区。 通过上述分析,现有技术存在的问题及缺陷为:现有无人机烟草施药方法存在较 大的空白区或无效区,不但浪费农药、污染环境、增加成本,病虫害防控效果较差,在烟草团 棵期以后至成熟采烤期间的绝大部分时间里,是无法利用无人机进行有效病虫害防控的。 解决以上问题及缺陷的难度为:目前的无人机施药方式大多为至上而下,而烟草 生长发育的中后期,受上部烟叶的遮盖影响,农药穿透力不足很难附着在中下部烟叶的表 面,这也是无人机药剂喷施出现空白区或病虫防治效果不佳的主要原因。部分无人机飞防 公司通过加大药剂流量或药剂喷施次数等方法来提高病虫害防控效果,但从实验结果来看 所起的作用甚微、徒增成本,而且会造成上部烟叶附着农药过多,出现非可逆性药害或农残 超出限量标准等问题,这也是无人机飞防技术难以在植烟产区广泛推广的重要限制因素。 解决以上问题及缺陷的意义为:通过优化无人机施药技术,可进一步降低喷药成 本,提高烟农对无人机飞防技术的认可;通过优化无人机施药技术,可提高药液覆盖率,减 少防效空白区或无效区,提升病虫害的综合防治效果;通过优化无人机施药技术,可完善烟 草绿色防控技术体系,进一步减少化学农药对烟草和生态环境的影响。
技术实现要素:
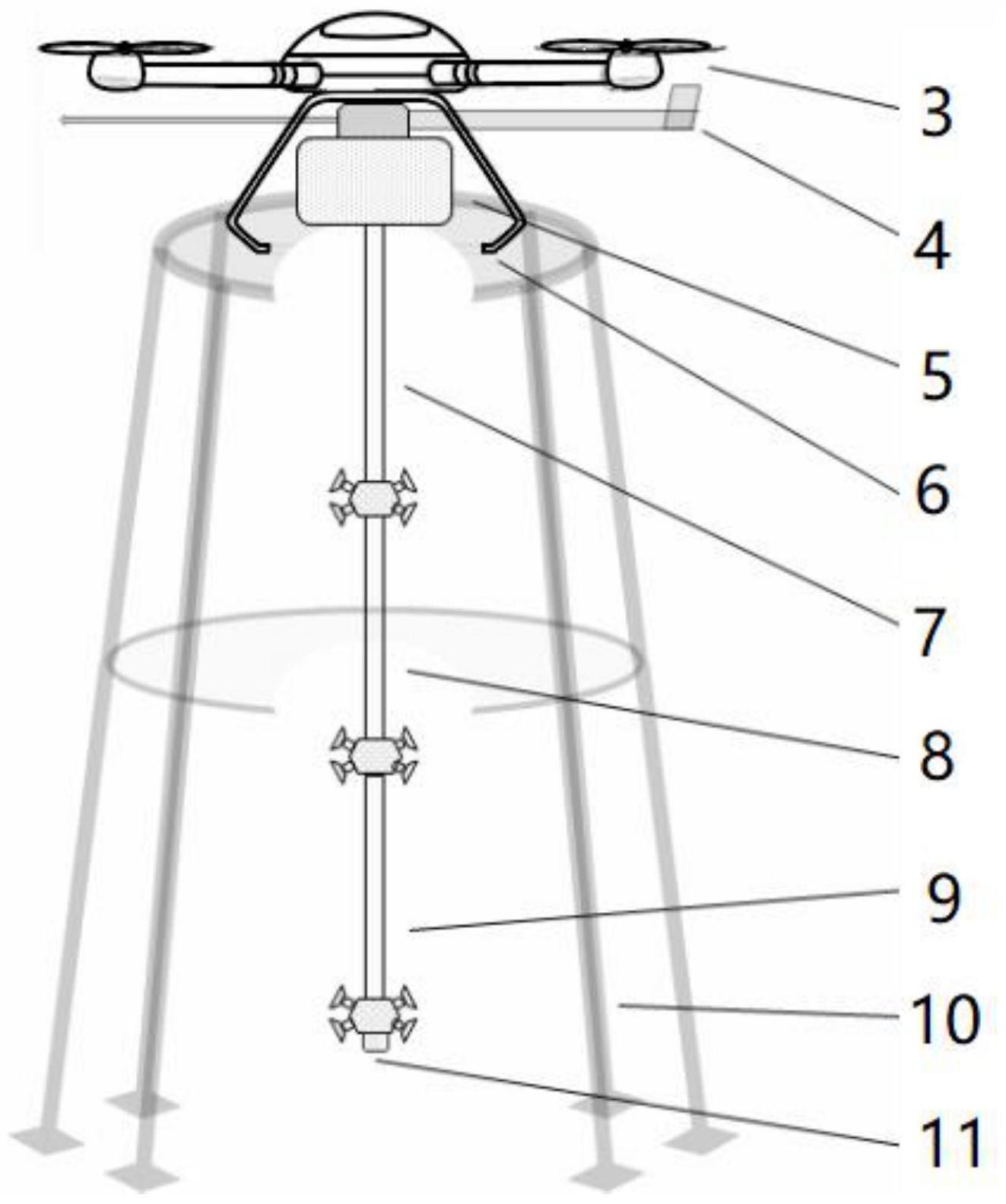
针对现有技术存在的问题,本发明提供了一种烟草施药控制方法、系统、存储介 质、无人机。 本发明是这样实现的,一种烟草施药控制方法,所述烟草施药控制方法包括: 第一步,根据烟草生产的实际情况,采用油式多旋翼喷雾无人机; 第二步,结合烟草不同时期的发育长势、流行病虫害和用药重点实际情况,按照不 同生产季节采用移栽期执飞参数、团棵期执飞参数、现蕾期执飞参数和平顶期执飞参数进 行施药。 进一步,所述油式多旋翼喷雾无人机整机净重量15~20Kg,最大起飞重量30~ 5 CN 111731481 A 说 明 书 3/9 页 50Kg,空载连续飞行时间≥30min,满载连续飞行时间不低于10min。 进一步,所述移栽期执飞参数为飞行路线两垄之间,飞行高度1.0~1.5m,感应探 头距垄沟底部30~35cm,飞行速度4.0~5.0m/s,喷洒流量1.2~1.6L/min。 进一步,所述团棵期执飞参数为飞行路线为两垄之间; 第一次飞行高度1.0~1.5m,感应探头距垄沟底部25~30cm,飞行速度3.0~4.0m/ s,喷洒流量1.5~1.8L/min; 第二次飞防应与第一次飞防间隔1~2天,飞行高度1.5~1.8m,感应探头距垄沟底 部40~45cm,飞行速度4.0~6.0m/s,喷洒流量2.0~2.4L/min。 进一步,所述现蕾期执飞参数为飞行路线两垄之间; 第一次飞行高度1.5~2.0m,感应探头距垄沟底部25~30cm,飞行速度3.0~4.0m/ s,喷洒流量1.5~1.8L/min; 第二次飞防应与第一次飞防间隔1~2天,飞行高度2.0~2.5m,感应探头距垄沟底 部50~60cm,飞行速度4.0~5.0m/s,喷洒流量1.6~2.0L/min。 进一步,所述平顶期执飞参数为飞行路线两垄之间; 两次飞的飞行高度2.5~3.0m,感应探头距垄沟底部50~60cm,飞行速度3.5~ 4.5m/s,喷洒流量2.0L/min。 本发明的另一目的在于提供一种接收用户输入程序存储介质,所存储的计算机程 序使电子设备执行权利要求任意一项所述包括下列步骤: 第一步,根据烟草生产的实际情况,采用油式多旋翼喷雾无人机; 第二步,结合烟草不同时期的发育长势、流行病虫害和用药重点实际情况,按照不 同生产季节采用移栽期执飞参数、团棵期执飞参数、现蕾期执飞参数和平顶期执飞参数进 行施药。 本发明的另一目的在于提供一种实施所述烟草施药控制方法的烟草施药控制系 统,所述烟草施药控制系统包括: 硬件执行模块,用于实现药剂的喷洒; 参数设置模块,用于设置移栽期执飞参数、团棵期执飞参数、现蕾期执飞参数和平 顶期执飞参数。 本发明的另一目的在于提供一种搭载所述烟草施药控制系统的烟草施药控制装 置,所述烟草施药控制装置设置有: 无人机; 无人机的底部安装有导向杆和储药器,储药器下端与一级导杆及喷头、二级导杆 及喷头、三级导杆及喷头连接,三级导杆及喷头的下方安装有感应探头,无人机在起落平台 上起落,起落平台安装在平台支架的顶部。 所述储药箱的底部设置有连接槽、密封垫和废液口; 所述平台支架的上下平台为不锈钢材质的平板,中央及一侧留有扇形缺口,其中 上平台配备水准仪;所述平台支架为不锈钢材质的空心管,配有旋紧装置和固定支脚; 所述导杆及喷头由不锈钢材料焊接,内外表面镀有特殊的防腐蚀涂层;各级导杆 由分液器部件连接;一级导杆及喷头用于烟草移栽期和团棵期,一级导杆及喷头、二级导杆 及喷头串联用于烟草旺长期,一级导杆及喷头、二级导杆及喷头、三级导杆及喷头串联用于 6 CN 111731481 A 说 明 书 4/9 页 烟草平顶期;喷头用分液器连接,分液器下端留有连接口,用于安装导杆或探头。 无人机是精准施药的主要载体,搭载药箱、连接槽等配件,其中药箱为可替换式设 计,安装在无人机底部的连接槽;导杆、喷头等直接安装在连接槽下部,根据需求选用不同 规格的导杆或喷头。平台支架、高度探头等是精准施药的辅助设备,与无人机配合使用,其 中平台支架的主要功能是为无人机起降提供方便,高度探头是确保无人机安全。 本发明的另一目的在于提供一种搭载所述烟草施药控制装置的无人机。 结合上述的所有技术方案,本发明所具备的优点及积极效果为:本发明是在大农 业无人机施药方法的基础上,专门针对烟草生理特点和发病特性,而提出的全新烟草无人 机施药模式。降低了无人机施药对场地和人员等的要求,能够适应不同植烟产区的需求,在 应对复杂地形影响、控制病虫害发生等方面都有着良好的效果,有效提高了烟草病虫害防 控环节的机械化、信息化和智能化水平,是提高农药使用效率、降低农残污染的重要手段。 本发明根据烟草不同病虫害的发生特点和流行趋势,结合烟草生育期制定了四套 无人机施药技术规程,每套技术规程包括硬件模块和参数模块两个部分,其中硬件模块由 无人机、导航杆、感应球和起落架等部件组成,技术参考包含药剂配制、操作指导和注意事 项等。通过硬件的不同组合并配套相应的施药技术,能够满足团棵期、旺长期等烟草不同生 育期的用药需求,实现了烟草病毒病、气候性斑点、赤星病、白粉病和烟蚜等病虫害的精准 防控,适用于山地、丘陵、平原等多种烟草种植区域,具有广泛的适用性和极高的推广价值。 本发明的无人机对烟草进行精准施药的方法,是在大农业无人机施药方法的基础 上,专门针对烟草生理特点和发病特性,而提出的全新烟草无人机施药模式,它针对烟草不 同的发育阶段,研发了相应的硬件设施和配套的飞防参数,所制定的无人机飞防方案覆盖 了烟草整个大田生育期,防治对象包含了烟草病毒病、真菌病、细菌病和营养失调症等40余 种常见病虫害。 本发明的无人机精准施药方法设计了多级导杆、四向喷头和可调式起落平台等创 新性配件,通过配合使用可以有效降低防治药剂的喷施空白区或无效区,不但可以避免药 剂的浪费和损耗,而且提升了病虫害的防治效果,解决了无人机飞防无法在烟草大田中后 期使用或病虫害防控效果差的难题。可调式起落平台等配件强化了无人机升降的适应性, 符合植烟区域多为山地、丘陵等地形的实际情况和需求。 本发明无人机精准施药的硬件配置和技术参数,是在多次田间试验的基础上分析 总结出来的,在应对植烟区域复杂地形影响、防控烟草病虫害发生等方面都有着良好的效 果,有效提高了烟草产区病虫害综合防治的机械化、信息化和智能化水平,是提高农药使用 效率、降低农残污染、保护生态环境的重要手段,同时也为茶叶、果树等与烟草相似的农产 品,在病虫害防治无人机飞防等方面提供了新的方法和参考。 附图说明 为了更清楚地说明本申请实施例的技术方案,下面将对本申请实施例中所需要使 用的附图做简单的介绍,显而易见地,下面所描述的附图仅仅是本申请的一些实施例,对于 本领域普通技术人员来讲,在不付出创造性劳动的前提下还可以根据这些附图获得其他的 附图。 图1是本发明实施例提供的烟草施药控制方法流程图。 7 CN 111731481 A 说 明 书 5/9 页 图2是本发明实施例提供的烟草施药控制系统的结构示意图; 图中:1、硬件执行模块;2、参数设置模块。 图3是本发明实施例提供的烟草施药控制装置的结构示意图; 图中:3、无人机;4、导向杆;5、储药器;6、起落平台;7、一级导杆及喷头;8、二级导 杆及喷头;9、三级导杆及喷头;10、平台支架;11、感应探头。 图4是本发明实施例提供的无人机精准施药技术移栽期示意图.。 图5是本发明实施例提供的无人机精准施药技术团棵期第一次飞防示意图。 图6是本发明实施例提供的无人机精准施药技术团棵期第二次飞防示意图。 图7是本发明实施例提供的无人机精准施药技术现蕾期第一次飞防示意图。 图8是本发明实施例提供的无人机精准施药技术现蕾期第二次飞防示意图。 图9是本发明实施例提供的无人机精准施药技术平顶期飞防示意图。











