
技术摘要:
本发明公开了一种柔性触觉传感器阵列及其制备方法,其中柔性触觉传感器阵列包括柔性基底和触觉传感阵列;触觉传感阵列包括N×M个触觉传感单元和互联线网络;触觉传感单元为一个被共形的聚合物包裹封装的栅状金属箔,且每个栅状金属箔上集成了原位硬质微柱阵列;互联线网 全部
背景技术:
随着材料科学和制造技术的不断进步,社会及工业界对各类电子设备的功能性、 便携性和舒适性等提出了新的要求,柔性化已成为新兴电子器件的一个重要的发展方向。 相比于传统刚性电子器件,可弯曲可变形是柔性器件重要特征,它具有柔性、弹性和承受任 意形变的能力,在医疗辅助、可穿戴健康监测和人机交互等领域展现出广阔的应用前景。 柔性触觉传感器可以赋予机器手如人手般的触觉,是实现机器人智能感知和人机 交互的核心器件。该传感器可将触觉信号转换为电信号,能实现触觉信息的快速精确传导。 若将多个触觉传感器单元集成在一片柔性基底上,就可以形成一个N*M的柔性触觉传感器 阵列。该阵列通过互联线连接为一个整体,再通过外部电路控制可以同时测量一定区域内 的多点的接触压力的变化,在医学、工业以及娱乐等领域拥有巨大的应用潜力。柔性触觉传 感器根据传感工作机理主要可分为电阻式、电容式和压电式。其中,电阻式触觉传感器的工 作原理可概括为:外界接触压力刺激导致传感器的电阻值改变,导致输出的电流或电压的 改变,从而来反馈接触压力的大小。 电阻式柔性触觉传感器的技术核心是构造对压力敏感的电阻值可变系统,目前的 方法有:1)柔性压敏导电材料作为传感器敏感单元:柔性压敏导电材料是将炭黑、碳纳米管 或石墨烯等粉末状或颗粒状的导电物质作为导电相与硅橡胶、水凝胶等掺杂固化,从而形 成一种柔性可拉伸的压敏导电复合材料。它在压力的作用下改变内部导电颗粒的间距进而 表现为电阻的改变;2)可变的接触电阻作为敏感单元:将具有表面微结构的上下电极材料 接触导通可产生接触电阻,在不同的压力作用下会产生不同的接触状态从而具有不同的接 触电阻,进而能够改变输出电信号。 现有的采用柔性压敏导电材料作为传感器敏感单元的电阻式柔性触觉传感器虽 可实现分布压力测量,但是其在灵敏度、迟滞性以及集成度等方面存在明显不足;采用可变 接触电阻作为敏感单元的电阻式柔性触觉传感器在量程和集成度上存在瓶颈。
技术实现要素:
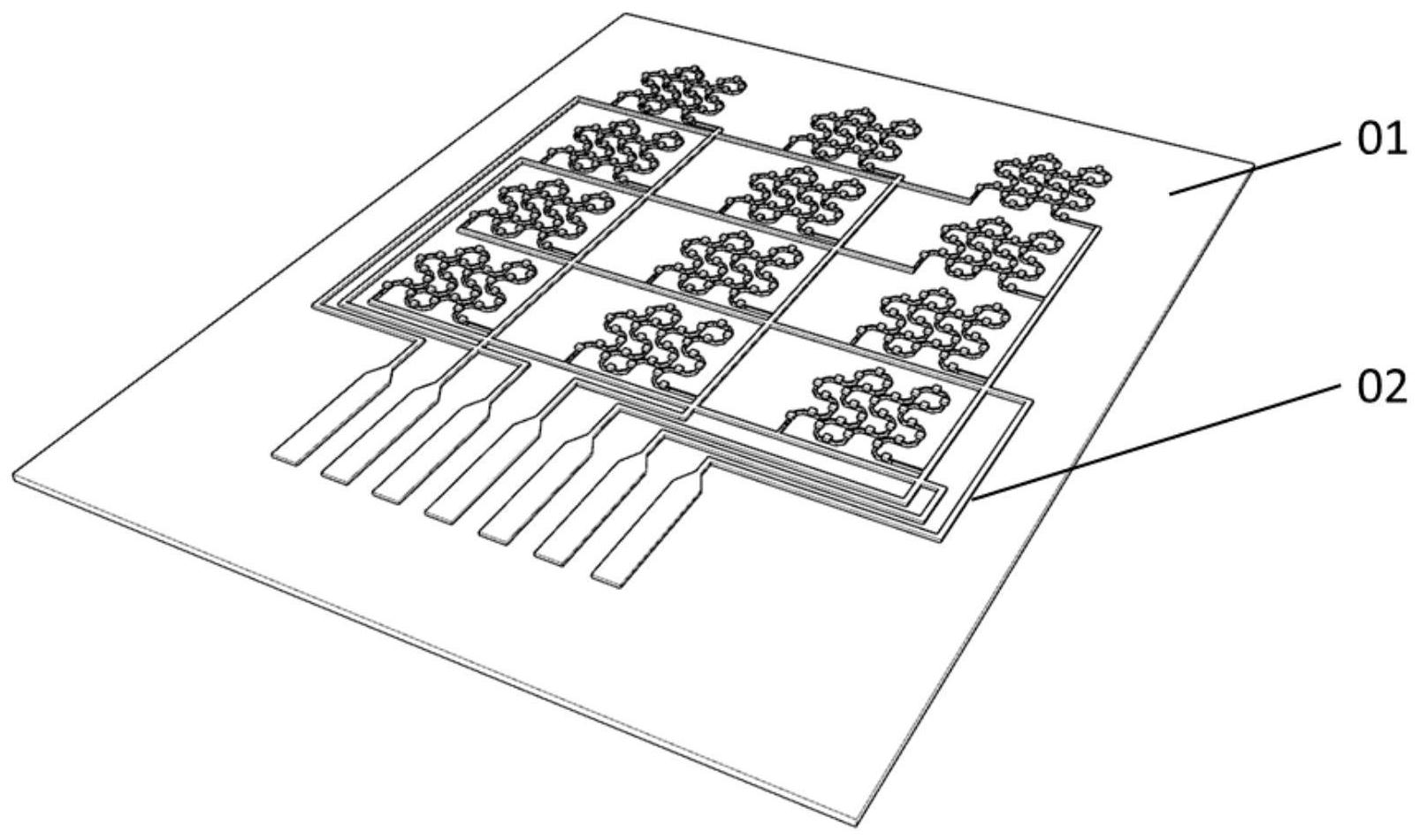
本发明的目的在于提供了一种高稳定性、高灵敏度、低迟滞、高集成度的新型电阻 式柔性触觉传感器阵列及其制备方法。 一种柔性触觉传感器阵列,包括柔性基底和触觉传感阵列,所述触觉传感阵列包 括N×M个触觉传感单元以及连接每个触觉传感单元的互联线网络; 所述的触觉传感单元为一个被共形的聚合物包裹封装的栅状金属箔,所述的栅状 金属箔上集成了硬质微柱阵列; 所述互联线网络包括垂直交叉的N条行线和M条列线,在行线和列线的交叉点设有 交叉绝缘垫,所述的行线与列线均被共形的聚合物包裹封装;所述的触觉传感阵列键合在 4 CN 111609955 A 说 明 书 2/5 页 柔性基底上。 本发明中,柔性基底为一块具有柔弹性的硅橡胶一类的薄层基底,N条行线和M条 列线垂直交叉组成互联线网络,但在交叉点做绝缘处理使得行线列线不接触不连通。触觉 传感单元置于交叉点附近,其一端连接行线,另一端连接列线。N×M个触觉传感单元通过共 用的行线、列线网络构成互联的触觉传感阵列。 柔性基底与触觉传感阵列键合后,依托于基底的柔性,当接触压力作用于触觉传 感单元时,压力被硬质微柱放大的同时又通过硬质微柱挤压其下金属箔,金属箔随着柔性 基底的下凹自身受到拉伸和弯曲变形,导致金属箔的电阻改变。当解除接触压力后,由于柔 性基底的弹性,基底迅速回弹,金属箔的形状和电阻得以恢复。因此,在接触压力施加和释 放的过程中,通过硬质微柱的挤压以及柔性基底的下凹变形和迅速回弹,触觉传感单元的 电阻能作出快速响应,进而改变了输出电信号,因此具有感知压力的功能。 通过外部设备扫描N条行线和M条列线组成的互联线网络,使得这N×M个触觉传感 单元同时工作,彼此不影响,独立传感压力信号,从而使该触觉传感器阵列实现多点实时测 量分布压力的功能。 本发明根据金属箔的电阻受压改变的机理,构造了硬质微柱挤压栅状金属箔的结 构,并以此为触觉传感单元结合互联线网络构造了新型触觉传感器阵列阵列,得到一种集 高稳定性、高灵敏度、低迟滞、高集成度等优点于一体的新型电阻式柔性触觉传感器阵列。 柔性基底优选为PDMS(聚二甲基硅氧烷)薄层,厚度优选为200微米,也可以选择其 他柔弹性材料,如硅橡胶、橡胶、水凝胶、介电高弹体等,衬托触觉传感阵列、提高下凹变形 空间和迅速回弹变形的作用。 作为优选,所述栅状金属箔采用矩波型栅状,也可以设计为直线型栅状或波浪形 栅状,栅宽优选为20微米,栅间距优选为80微米。 所述的栅状金属箔由被共形的聚合物包裹封装的单层或多层金属构成,每层金属 的厚度为5纳米-100微米,聚合物包裹厚度为2微米-200微米。 作为优选,所述金属采用铬金双层金属,铬厚度5纳米,金厚度100纳米。 作为优选,所述聚合物包裹采用PI(聚酰亚胺),厚度为5微米,也可以为聚对苯二 甲酸类聚合物。 所述硬质微柱阵列中,硬质微柱为长方体、圆柱体或锥体,优选为长方体,尺寸优 选为20*20*35微米,优选光固化树脂作为材料,也可以选择光固化聚合物或光刻胶。 作为优选,所述的交叉绝缘垫为1-5微米厚的PI(聚酰亚胺)。 本发明还提供了一种柔性触觉传感器阵列的制备方法,包括以下步骤: (1)采用PDMS液态预聚物,在硅片上通过旋涂和热固化制得特定厚度的柔性基底; (2)采用微纳制造技术制备由触觉传感单元和互联线网络组成的触觉传感阵列; (3)采用水溶转印技术将触觉传感阵列转移并键合到柔性基底上,最终得到所述 的电阻式柔性触觉传感器阵列。 步骤(1)中,所述的旋涂可以通过控制转速和时间来获得不得厚度的柔性基底,也 可以使用模具制备特定厚度的柔性基底。 步骤(2)中,所述微纳制造技术,包括光刻显影技术、金属镀膜技术、聚合物干法刻 蚀技术。 5 CN 111609955 A 说 明 书 3/5 页 步骤(2)的具体步骤为: (2-1)将PI液态预聚物旋涂在硅片上并热固化制得PI底层; (2-2)在PI底层上光刻、显影、金属镀膜和金属剥离后,制得矩波型栅状金属箔和 互联线网络于PI底层上,期间要对互联线网络的交叉点进行绝缘处理; (2-3)将PI液态预聚物旋涂于上述硅片,并热固化形成PI封装层,并通过干法刻蚀 PI,使其与矩波型栅状金属箔和互联线网络共形,从而形成夹心结构; (2-4)采用光敏环氧树脂预聚物,在夹心结构上通过光刻技术制得硬质微柱后,便 完成触觉传感阵列的制备; (2-5)采用化学试剂浸泡的方式将触觉传感阵列从硅片上释放。 步骤(3)的具体步骤为: (3-1)使用水溶性胶带将释放的触觉传感阵列平整拾取,阵列一面与胶带完全粘 附,另一面暴露,在暴露面上沉积一薄层铬和一薄层二氧化硅; (3-2)将柔性基底置于等离子清洗机中用氧气处理后,迅速将黏有触觉传感阵列 的水溶性胶带与柔性基底热压键合为一整体,再其置于水中使得水溶性胶带完全溶解,从 而得到柔性触觉传感器阵列。 与现有技术相比,本发明具有以下有益效果: 1、本发明的柔性触觉传感器阵列可集成N×M个触觉感测单元,每个单元独立传感 压力信号,从而使该触觉传感器阵列实现多点实时测量分布压力的功能,具有超高灵敏度, 能感知极轻微压力; 2、本发明电阻式柔性触觉传感器阵列的硬质微柱设计不仅提高灵敏度且保证了 阵列集成度; 3、本发明电阻式柔性触觉传感器阵列采用的金属材料以及微纳制造技术使其具 备高稳定性和高寿命; 4、本发明电阻式柔性触觉传感器阵列制备方法简单、制备成本低,集成度高且布 线和引脚少。 附图说明 图1为本发明实施例电阻式柔性触觉传感器阵列的总体示意图; 图2为本发明实施例触觉单元结构示意图; 图3为本发明实施例互联线网络电路图; 图4为本发明实施例的触觉传感单元的放大原理图。 图中:01-柔性基底,02-触觉传感阵列,栅状金属箔21,硬质微柱阵列22,行线23, 列线24,交叉绝缘垫25。











