
技术摘要:
本发明提出一种点云图像的平面提取方法,包括以下步骤:利用传感器采集环境信息获得点云图像并对点云图像进行分块,得到多个点云快;提取所述多个点云块中具有平面特征的点云块;将所述具有平面特征的点云块连接形成特定平面。根据本发明实施例的点云图像的平面提取方 全部
背景技术:
随着机器人(包括无人机等空中机器人)视觉导航技术的发展,平面特征成为备受 关注的新特征。能够快速、鲁棒地提取出场景中的平面特征对于机器人自主定位与导航技 术意义重大。当前的在三维点云中提取平面的技术主要有以下几种方式:经典的RANSAC算 法,Region growing算法和Grid-based region growing算法。经典的RANSAC算法的局限在 于在环境的三维图像中有两个大小相近的大平面时,RANSAC算法有很大的概率不收敛,进 而导致无法提取出平面;Gegion-growing算法的局限在于计算量非常大,需要考虑点云图 像边缘的特殊处理;Grid-based region growing算法的局限在于需要在每个空间块内利 用矩阵分析的方法判定局部平面特征,进而通过连通域分析的方式将局部平面特征整合成 大的平面特征,计算量太大,不利于平面的判定和算法扩展。
技术实现要素:
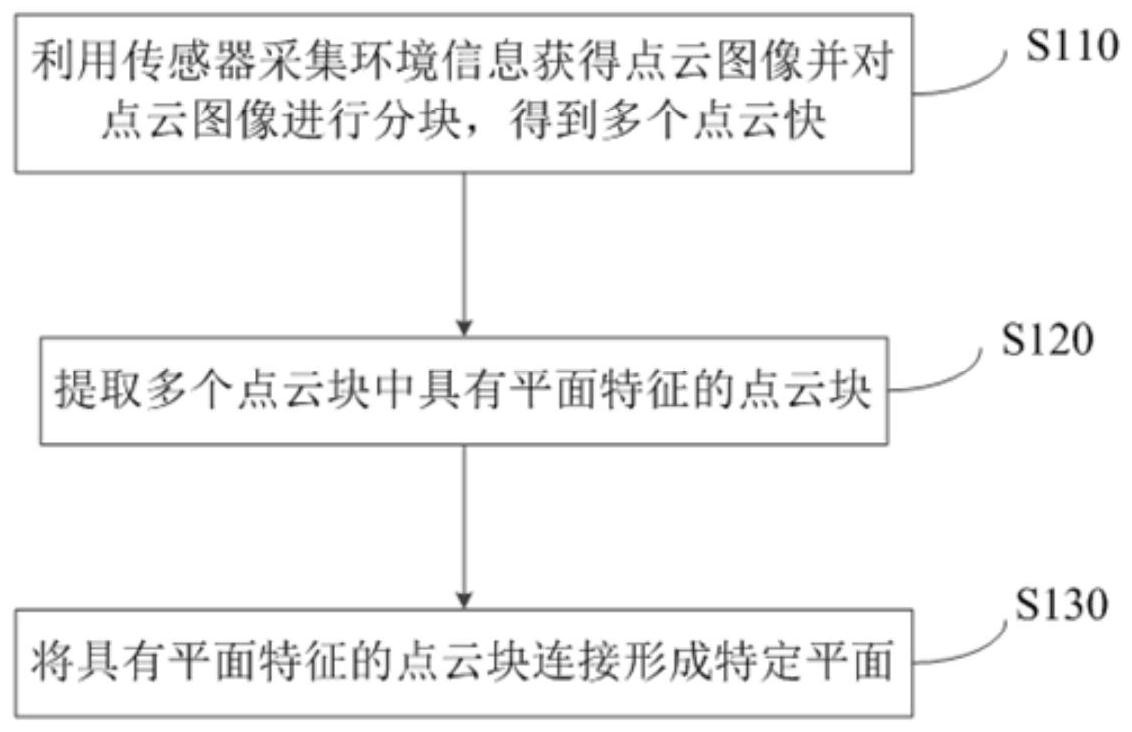
本发明旨在至少在一定程度上解决上述技术问题之一或至少提供一种有用的商 业选择。 为此,本发明的一个目的在于提出一种点云图像的平面提取方法,该方法算法简 单、效率高,提高了自然场景中平面信息的提取效率,可广泛应用于多种视觉应用,具有良 好的可扩展性。 为了实现上述目的,本发明公开了一种点云图像的平面提取方法,包括以下步骤: 利用传感器采集环境信息获得点云图像并对点云图像进行分块,得到多个点云快;提取所 述多个点云块中具有平面特征的点云块;将所述具有平面特征的点云块连接形成特定平 面。 根据本发明实施例的点云图像的平面提取方法,算法简单、效率高,提高了自然场 景中平面信息的提取效率,可广泛应用于多种视觉应用,具有良好的可扩展性。 另外,根据本发明上述的点云图像的平面提取方法还可以具有如下附加的技术特 征: 进一步地,所述传感器包括激光传感器、RGBD传感器、Tof相机和双目可见光相机。 进一步地,所述点云图像是指有固定宽度和高度的图像,可与普通数字图像一样 使用两个坐标(x,y)确定每个点在图像中的位置。 进一步地,所述点云图像分辨率为W×H,将其分为L2块,则每个点云块中所含有的 点云数量为K=w×h,其中w=W/L,h=H/L。 进一步地,所述提取所述多个点云块中具有平面特征的点云块的步骤包括在每个 点云块中使用RANSAC算法计算局部平面方程,获得平面内点的数目Nl和归一化平面方程的 方程参数ηl=(a,b,c,d)T,l为点云块编号,具体为:将点云块的数量K,记做集合C,按照均匀 3 CN 111582285 A 说 明 书 2/5 页 抽样的原则从所述集合C中随机选取k0个点作为初始点,记做集合C0;将所述集合C0中所有 的点利用最小二乘法求得最优平面方程η0,方程η0:ax by cz d=0,(x,y,z)为点的三维坐 标值,计算所述集合C中各点到最优平面η0的距离,若距离小于阈值dth,则认为该点是属于 此平面的内点,将所述集合C上所有的点的集合记为I0,称为集合C0的一致集,若I0中点的数 量大于阈值Nth,则认为此方程η0是正确的,对I0中的所有的点使用最小二乘法计算出新的 平面方程ηl,若I0中点的数量小于阈值Nth,则认为平面模型η0是错误的;设定的抽样次数为m 次,若一直未找到集合C0的一致集,则算法失败,否则选取抽样后得到的最大集合C0的一致 集Imax,以其对应的平面模型ηlmax作为此点云块的平面模型,对应的点的数目为Nlmax。 进一步地,所述将所述具有平面特征的点云块连接形成特定平面的步骤包括利用 广度优先搜索算法将多个具有平面特征的点云块连接成一个特定平面,具体为:S1:将所有 具有平面特征的点云块集合记为集合G,从中选取一个未加入任何平面的点云块记为gi,计 算gi平面方程ηi与其相邻且未加入任何一个平面的点云块gj的平面方程ηj的欧氏距离,dη= ||ηi-ηj||,若dη足够小,则认为gi与gj属于同一个大平面,将ηi和ηj取平均作为gi与gj组成的 新平面的模型参数,将gi与gj从集合G中去除并组成一个新的集合pi;S2:对gi所有相邻点云 块重复步骤S1,标记gi为已使用,对点云块集合pi中未标记使用的点云块继续重复步骤S1, 直到pi中所有点云块均为已使用,表明与gi位于同一个大平面的点云块都已加入集合pi中, 则该大平面记为Pi;S3:对集合G中的其他点云块重复步骤S1和S2,直到集合G成为空集。 本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变 得明显,或通过本发明的实践了解到。 附图说明 本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得 明显和容易理解,其中: 图1是根据本发明一个实施例的点云图像的平面提取方法的流程图。











