
技术摘要:
本发明涉及无人机配送领域。目的在于提供一种适用于货物批量递送的多旋翼配送无人机,包括无人机主体和搭载在无人机主体下方的装卸货架;所述装卸货架由上至下依次包括用于储存飞行包裹箱的储存区和用于将飞行包裹箱从侧面递送至用户端的卸载区;所述储存区包括呈长方 全部
背景技术:
近年来,随着无人机和物流行业的快速发展,强大的市场需求使得无人机配送成 为新的热门领域。在无人机配送的过程中,货物的盛装和卸载问题一直是本领域的一个核 心技术问题,目前常用的装卸方式主要有两种:一、采用吊仓式装卸结构,二、货架式装卸结 构。 前者通过绳索将无人机与货仓连接,货物放置在货仓内,在货物送达目的地后,直 接剪断绳索或直接将绳索与货仓脱扣,实现卸载;这种方式虽然在逻辑上简单易行,但考虑 到飞行器在飞行过程中柔性的绳索连接方式可能会影响飞行的稳定性,故飞行器的飞行速 度不宜过快,且通常不宜配送质量较大的货物。同时,这种方式飞行器每次只能配送一件货 物,这也制约了配送效率。后者采用在无人机飞行器上搭载货架的方式,这种方式与前者相 比,能够进行相对较重的货物的运输,且稳定性也更好。 但目前货架式装卸结构也存在一定的问题: 1、虽然货架式装卸结构在理论上可利用货架配合推送机构满足多件货物同时配 送的需求,但至今仍然存在于理论构想阶段,没有成熟可行的具体技术方案,影响了无人机 配送的发展。虽然也有部分技术文献公开了一些货架式的装卸结构,如公开号为 CN105923163B的专利文献,但其结构过于简单且自动化程度较差,明显不符合无人机配送 的需求。 2、无人机在进行空中配送的过程中,为了确保无人飞行器的安全性,无人机不宜 离建筑物过近,故现有技术中多采用垂直递送的形式,然而这种形式需要在楼顶或户外露 天平台上设置专用的卸货装置,但对于大多数建筑而言,并不是每一个业主住户的户型都 便于这种露天平台的安装,故这种垂直递送的形式实际上并不适合直接送达用户端的货物 递送,无法充分发挥无人机递送快捷、准确、高效的优势。因此,若能设计出一种能够实现货 物侧向递送的无人机配送装置,在无人机飞抵建筑立面指定位置后,直接将货物递送至用 户或用户住所立面上的接收台,将从根本上解决上述问题。 3、在无人机空中递送的过程中,由于不同的货物具有不同大体积,为了提高货物 配送的通用性,通常无人机搭载的货架与无人机主体之间采用可拆卸连接的结构。但由于 采用高空作业,故货架与无人机连接结构的稳定性直接决定了空中配送的安全性,目前传 统的连接结构在安全性上还存在一定的缺陷。
技术实现要素:
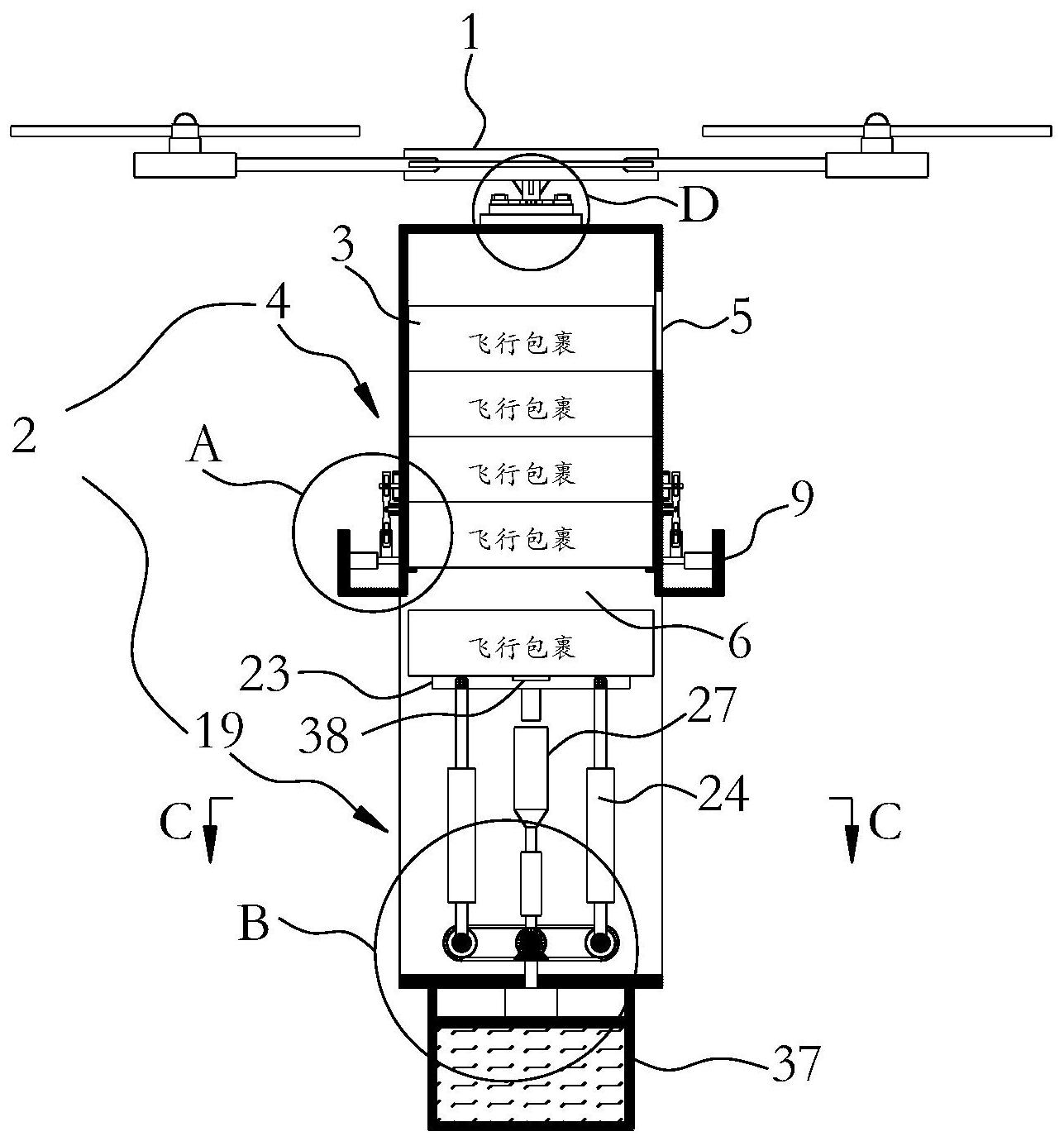
本发明的目的在于提供一种适用于货物批量递送的多旋翼配送无人机。 为实现上述发明目的,本发明所采用的技术方案是:一种多旋翼配送无人机,包括 无人机主体和搭载在无人机主体下方的装卸货架;所述装卸货架由上至下依次包括用于储 4 CN 111547245 A 说 明 书 2/7 页 存飞行包裹箱的储存区和用于将飞行包裹箱从侧面递送至用户端的卸载区; 所述储存区包括呈长方体状的、长度和宽度与飞行包裹箱相适配的仓体,所述仓 体上部的一侧设置有高度和宽度与飞行包裹箱相适配的进货口,底部设置有长度和宽度与 飞行包裹箱相适配的出货口;靠近所述出货口左右两侧的仓体侧壁上设置有承托控制机 构,仓体内放置有若干飞行包裹箱; 所述承托控制机构包括承托组件、夹持组件和联动组件,所述承托组件能够在承 托状态与放行状态之间切换,以实现位于仓体最底层的飞行包裹箱的承托或放行;所述夹 持组件能够在夹持状态与解锁状态之间切换,以实现位于仓体倒数第二层的飞行包裹箱的 夹持或解锁;所述承托组件切换至承托状态时,联动组件能够带动夹持组件切换至解锁状 态;所述承托组件切换至放行状态时,联动组件能够带动夹持组件切换至夹持状态。 优选的,所述承托组件包括第一电动推杆和L形的托板,所述第一电动推杆固定设 置在仓体底部侧壁上的安装板上,且伸缩端朝向仓体内部,所述托板固定设置在第一电动 推杆的伸缩端上;所述仓体的侧壁上对应设置有与托板相配合的第一通孔;所述承托组件 切换至承托状态时,托板经第一通孔伸入仓体内,托板的底侧边构成对飞行包裹箱底面的 支撑,托板的立侧边构成对飞行包裹箱侧面的抵紧;所述承托组件切换至放行状态时,托板 经第一通孔退出仓体外,飞行包裹箱沿仓体下滑放行。 优选的,所述安装板由仓体侧壁的下边沿呈倒U形弯折形成。 优选的,所述夹持组件包括短横杆和设置在短横杆朝向仓体内部一端的夹板,所 述仓体的侧壁上对应夹板的位置设置有与夹板相配合的第二通孔;所述夹持组件切换至夹 持状态时,夹板经第二通孔伸入仓体内,夹板的内表面构成对飞行包裹箱侧面的抵紧;所述 夹持组件切换至解锁状态时,托板经第二通孔退出仓体外形成对飞行包裹箱的解锁。 优选的,所述托板底侧边和立侧边朝向飞行包裹箱的一面均设置有橡胶层,所述 夹板朝向飞行包裹箱的一面也设置有橡胶层。 优选的,所述联动组件包括联动杆和驱动杆,所述第一通孔与第二通孔之间的仓 体侧壁上设置有安装短杆,所述联动杆的中段与安装短杆铰接,所述联动杆的上部和下部 均设置有条形孔;所述驱动杆固定设置在第一电动推杆的伸缩端上,所述驱动杆和短横杆 上设置有与条形孔相配合的销杆,所述销杆穿设在条形孔内;所述联动组件还包括弹性复 位部件,所述弹性复位部件呈自然状态时,所述承托组件为承托状态。 优选的,所述弹性复位部件为螺旋弹簧,所述联动杆位于安装短杆上下两侧的位 置分别通过一根螺旋弹簧与仓体连接。 优选的,所述承托控制机构在仓体的两侧对称设置。 优选的,所述仓体的内侧壁上设置有若干半球形的润滑凸点。 优选的,所述卸载区包括呈倒U形的卸载槽,所述卸载槽内设置有用于将飞行包裹 从侧面递送至卸载槽外的卸载机构; 所述卸载机构包括摆送组件和驱动组件;所述摆送组件包括两根对称设置在卸载 槽底部左右两侧的、沿前后方向延伸的第一转轴,所述第一转轴的两端安装在卸载槽的前 后侧壁上,并与卸载槽构成转动配合;所述第一转轴的两端均设置有同步齿轮,第一转轴两 端的同步齿轮之间通过同步带传动连接;所述摆送组件还包括位于卸载槽上部的一块递送 板和四根同步摆杆,四根所述同步摆杆的上端分别与递送板左右两端的前后两侧边铰接, 5 CN 111547245 A 说 明 书 3/7 页 四根所述同步摆杆的下端分别与两根第一转轴的两端固接;所述驱动组件与其中一根第一 转轴传动连接; 所述卸载机构还包括配重组件,所述配重组件包括设置在两根第一转轴之间的与 第一转轴平行的第二转轴,所述第二转轴的两端通过轴承安装在卸载槽的底板上;所述配 重组件还包括两根配重摆杆,所述配重摆杆的下端分别与第二转轴两端靠近轴承的位置固 接、上端与配重部件固接;所述第一转轴与第二转轴之间设置有传动组件,所述第一转轴与 第二转轴的转动方向相反; 所述传动组件包括设置在第一转轴与第二转轴之间的第一传动轮,所述第一传动 轮两端的轴杆安装在卸载槽底板上的一对耳板上,并与耳板构成转动配合;所述第一传动 轮与设置在第二转轴上的第二传动轮之间通过传动带传动连接;所述第一传动轮一端的轴 杆上还设置有第一传动齿轮,所述第一传动齿轮与设置在第一转轴上的第二传动齿轮相啮 合。 本发明的有益效果集中体现在:能够一次实现多件货物包裹的批量递送,提高了 无人机配送的效率。具体来说,本发明在使用过程中,工作人员将需要递送的货物在专用的 飞行包裹箱内打包好,将飞行包裹箱由进货口送入装卸货架储存区的仓体内叠放好,并设 置无人机主体的配送路线。无人机主体从配送站出发,将货物沿由下至上配送的顺序依次 运送至指定位置,并将盛装货物的飞行包裹箱依次放出。放出的具体过程如下:需要放出最 底层飞行包裹箱时,承托组件切换至放行状态,飞行包裹箱直接从仓体最下端的出货口滑 出,此时联动机构带动夹持组件切换至夹持状态,避免上方的飞行包裹箱下滑;待最底层的 飞行包裹箱滑出后,承托组件切换至承托状态,联动机构带动夹持组件切换至解锁状态,原 本位于倒数第二层的飞行包裹箱下滑,被承托组件托住,完成一个飞行包裹箱的出货,飞行 包裹箱最终从卸货区排出,实现卸载。本发明与传统方式相比,能够一次性的实现多件货物 的配送,且布局合理紧凑,自动化程度高,极大的提高了无人机配送的效率。 附图说明 图1为本发明的结构示意图; 图2为图1中A部放大图; 图3为润滑凸点的结构示意图; 图4为图1中B部放大图; 图5为图1中所示结构的C-C向视图; 图6为本发明一种使用状态的结构示意图; 图7为本发明另一种使用状态的结构示意图; 图8为图1中D部放大图; 图9为加强组件的俯视图; 图10为第一侧槽的结构示意图; 图11为第二侧槽的结构示意图。











