
技术摘要:
本发明公开了一种基于轨迹分析的高空抛物检测方法及装置,该方法包括获取当前监控视频的多帧图像,对多帧图像进行运动物体检测,确定出各帧图像上的运动物体,对确定出运动物体的各帧图像进行处理,确定出各帧图像上运动物体的中心坐标,根据各帧图像上运动物体的中心 全部
背景技术:
高空抛物被称为“城市毒瘤”,近年来,高空抛物伤人事件频频发生,不仅伤害他人 的身心健康,而且影响大众的安全感和幸福感,智慧社区对高空抛物场景的要求越来越高。 当前高空抛物的检测方式主要是采用高频摄像头和红外摄像头进行录像,然后进行事后人 工追溯。主动检测高空抛物的方式是通过深度学习进行训练学习,然后使用训练后的模型 来识别高空抛物,但是这种主动检测高空抛物方式限制其检测成功率的原因是受到的干扰 太强,如飞鸟、或者窗上出现一个人,都可能被识别到。因此,目前还缺少一种有效的主动检 测高空抛物的方案。
技术实现要素:
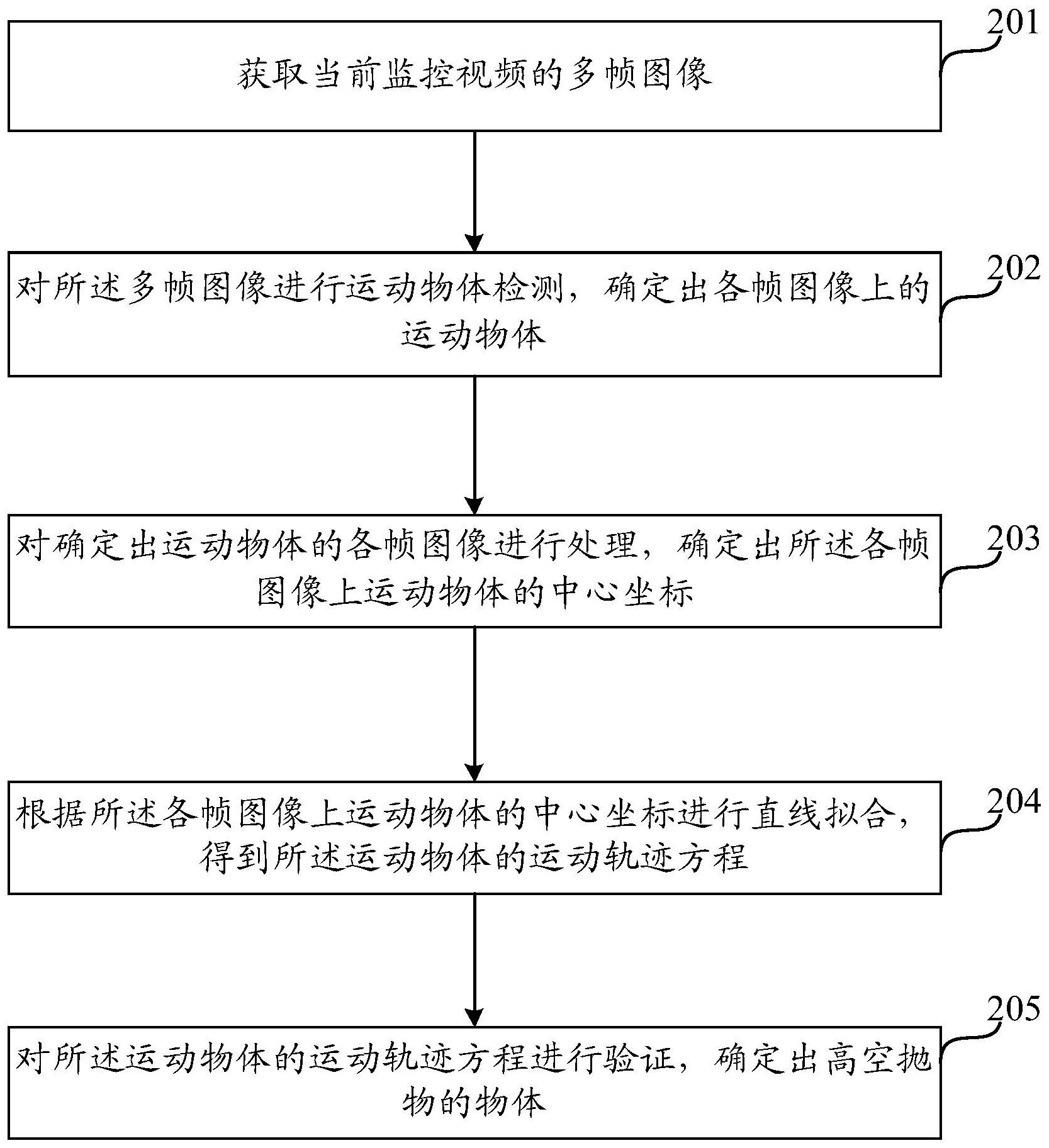
本发明实施例提供一种基于轨迹分析的高空抛物检测方法及装置,用以实现有效 的检测高空抛物,提高检测准确率,受干扰程度低。 第一方面,本发明实施例提供一种基于轨迹分析的高空抛物检测方法,包括: 获取当前监控视频的多帧图像; 对所述多帧图像进行运动物体检测,确定出各帧图像上的运动物体; 对确定出运动物体的各帧图像进行处理,确定出所述各帧图像上运动物体的中心 坐标; 根据所述各帧图像上运动物体的中心坐标进行直线拟合,得到所述运动物体的运 动轨迹方程; 对所述运动物体的运动轨迹方程进行验证,确定出高空抛物的物体。 上述技术方案中,通过先对各帧图像进行运动检测,得到各帧图像上的运动物体, 然后依据各帧图像上运动物体的坐标的运动轨迹方程,最后进行运动轨迹方程验证,从而 确定出高空抛物的物体,可以实现主动检测高空抛物线性,解决了深度学习难以进行识别 的问题,提高检测准确率。 可选的,所述对所述多帧图像进行运动物体检测,确定出各帧图像上的运动物体, 包括: 将所述多帧图像中的任一帧图像与所述任一帧图像的前一帧图像进行背景减法 处理,确定出所述任一帧图像与所述任一帧图像的前一帧图像中不同的点; 对所述任一帧图像与所述任一帧图像的前一帧图像中不同的点进行图像滤波处 理,得到所述各帧图像上的运动物体。 可选的,所述根据所述各帧图像上运动物体的中心坐标进行直线拟合,得到所述 运动物体的运动轨迹方程,包括: 4 CN 111553274 A 说 明 书 2/8 页 使用最小二乘法对所述各帧图像上运动物体的中心坐标进行直线拟合,得到所述 运动物体的运动轨迹方程。 可选的,所述对所述运动物体的运动轨迹方程进行验证,包括: 确定所述运动物体的运动轨迹方程中斜率是否符合预设范围; 根据所述运动轨迹方程和所述各帧图像上运动物体的中心坐标,确定所述运动轨 迹方程的拟合误差,确定所述拟合误差是否小于预设误差; 根据所述运动轨迹方程和所述各帧图像上运动物体的中心坐标,确定所述运动物 体的运动加速度,确定所述运动加速度是否符合预设加速度范围。 第二方面,本发明实施例提供一种基于轨迹分析的高空抛物检测装置,包括: 获取单元,用于获取当前监控视频的多帧图像; 处理单元,用于对所述多帧图像进行运动物体检测,确定出各帧图像上的运动物 体;对确定出运动物体的各帧图像进行处理,确定出所述各帧图像上运动物体的中心坐标; 根据所述各帧图像上运动物体的中心坐标进行直线拟合,得到所述运动物体的运动轨迹方 程;对所述运动物体的运动轨迹方程进行验证,确定出高空抛物的物体。 可选的,所述处理单元具体用于: 将所述多帧图像中的任一帧图像与所述任一帧图像的前一帧图像进行背景减法 处理,确定出所述任一帧图像与所述任一帧图像的前一帧图像中不同的点; 对所述任一帧图像与所述任一帧图像的前一帧图像中不同的点进行图像滤波处 理,得到所述各帧图像上的运动物体。 可选的,所述处理单元具体用于: 使用最小二乘法对所述各帧图像上运动物体的中心坐标进行直线拟合,得到所述 运动物体的运动轨迹方程。 可选的,所述处理单元具体用于: 确定所述运动物体的运动轨迹方程中斜率是否符合预设范围; 根据所述运动轨迹方程和所述各帧图像上运动物体的中心坐标,确定所述运动轨 迹方程的拟合误差,确定所述拟合误差是否小于预设误差; 根据所述运动轨迹方程和所述各帧图像上运动物体的中心坐标,确定所述运动物 体的运动加速度,确定所述运动加速度是否符合预设加速度范围。 第三方面,本发明实施例还提供一种计算设备,包括: 存储器,用于存储程序指令; 处理器,用于调用所述存储器中存储的程序指令,按照获得的程序执行上述基于 轨迹分析的高空抛物检测方法。 第四方面,本发明实施例还提供一种计算机可读非易失性存储介质,包括计算机 可读指令,当计算机读取并执行所述计算机可读指令时,使得计算机执行上述基于轨迹分 析的高空抛物检测方法。 附图说明 为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使 用的附图作简要介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本 5 CN 111553274 A 说 明 书 3/8 页 领域的普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他 的附图。 图1为本发明实施例提供的一种系统架构的示意图; 图2为本发明实施例提供的一种基于轨迹分析的高空抛物检测方法的流程示意 图; 图3为本发明实施例提供的一种背景图像的示意图; 图4为本发明实施例提供的一种运动物体的示意图; 图5为本发明实施例提供的一种运动物体的示意图; 图6为本发明实施例提供的一种运动物体的示意图; 图7为本发明实施例提供的一种运动物体的示意图; 图8为本发明实施例提供的一种运动物体的示意图; 图9为本发明实施例提供的一种运动物体的示意图; 图10为本发明实施例提供的一种运动物体的示意图; 图11为本发明实施例提供的一种中心坐标的示意图; 图12为本发明实施例提供的一种中心坐标的示意图; 图13为本发明实施例提供的一种中心坐标的示意图; 图14为本发明实施例提供的一种中心坐标的示意图; 图15为本发明实施例提供的一种中心坐标的示意图; 图16为本发明实施例提供的一种中心坐标的计算公式的示意图; 图17为本发明实施例提供的一种坐标点集合的示意图; 图18为本发明实施例提供的一种直线拟合的示意图; 图19为本发明实施例提供的一种斜率曲线的示意图; 图20为本发明实施例提供的一种三角函数的示意图; 图21为本发明实施例提供的一种基于轨迹分析的高空抛物检测装置的结构示意 图。











