
技术摘要:
本发明涉及一种公园垃圾智能化综合管理系统,包括调度站、垃圾处理站、垃圾箱、无人驾驶垃圾车。调度站的服务器用于接收垃圾箱发送的垃圾信息,并向无人驾驶垃圾车发送需求指令。垃圾箱用于盛放垃圾、采集垃圾信息以及向服务器发送垃圾信息。无人驾驶垃圾车用于根据服 全部
背景技术:
通常,公园的面积比较大,垃圾桶相对分散,游客人数受季节、天气等因素影响极 大,造成公园内垃圾桶存放数量的剧烈变化。传统的机制是工作人员定时定点回收,这样在 游客多垃圾多的情况下,会造成垃圾激增时段垃圾箱垃圾存放过量,造成垃圾随意丢弃,且 游客稀少的情况下也要正常清理。工作人员无法掌握垃圾箱中的垃圾储存情况,每次垃圾 收集均要逐个收集,工作效率低下。同时存在部分游客不能正确区分垃圾种类造成垃圾错 误投放的问题。 目前,为了解决上述问题,已经开发出垃圾智能管理系统,垃圾分类系统、以及垃 圾回收系统。但这些系统都是独立完成一个工序,没有系统化集成,所以无法针对公园分散 垃圾进行自动回收处理。
技术实现要素:
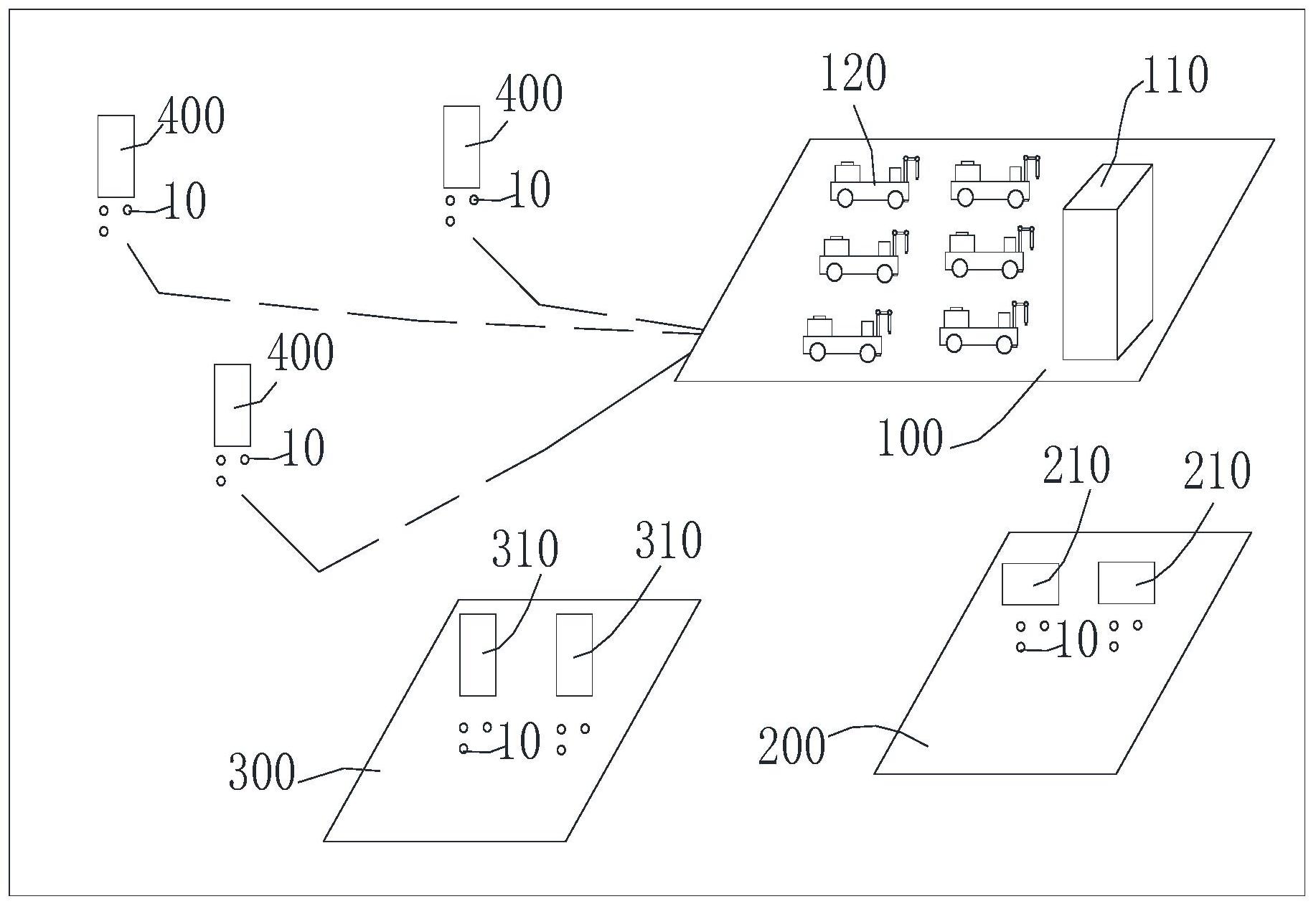
基于此,有必要针对传统垃圾处理技术无法针对公园分散垃圾进行自动回收处理 的问题,提供一种公园垃圾智能化综合管理系统。 一种公园垃圾智能化综合管理系统,包括: 调度站,所述调度站设置有服务器以及停车区,所述服务器内存储有各个垃圾箱 的位置信息,所述服务器用于接收垃圾箱发送的垃圾信息,并向无人驾驶垃圾车发送需求 指令,所述停车区用于停放无人驾驶垃圾车; 垃圾处理站; 垃圾箱,所述垃圾箱与所述服务器无线连接,所述垃圾箱用于盛放垃圾、采集垃圾 信息以及向所述服务器发送所述垃圾信息; 无人驾驶垃圾车,所述无人驾驶垃圾车与所述服务器无线连接,所述无人驾驶垃 圾车用于根据服务器发送的需求指令确定需要处理的垃圾箱的位置,并从调度站行驶至需 要处理的垃圾箱,所述无人驾驶垃圾车上设置有垃圾转运机构以及垃圾中转箱,所述垃圾 转运机构用于将需要处理的垃圾箱内的垃圾转移至所述垃圾中转箱内,所述无人驾驶垃圾 车还用于将垃圾中转箱内的垃圾运输至所述垃圾处理站。 上述公园垃圾智能化综合管理系统可通过垃圾箱获取垃圾信息,并将垃圾信息发 送给调度站的服务器,服务器可根据垃圾信息发送需求指令,无人驾驶垃圾车接收需求指 令后,行驶至需要处理的垃圾箱处,将需要处理的垃圾箱内的垃圾转移至无人驾驶垃圾车 上的垃圾中转箱内,并将垃圾中转箱内的垃圾运输至所述垃圾处理站,最后,无人驾驶垃圾 车返回调度站。整个过程可实现自动化处理,有利于节省人力,提高垃圾处理效率。 在其中一个实施例中,所述垃圾箱内的垃圾分类存放,所述垃圾中转箱内的垃圾 4 CN 111591637 A 说 明 书 2/8 页 分类存放。 在其中一个实施例中,所述服务器包括数据分析单元以及路线规划单元,所述数 据分析单元用于接收垃圾箱发送的垃圾信息,并根据垃圾信息分析确定需要处理的垃圾箱 的位置信息以及垃圾箱内的垃圾的重量,所述路线规划单元用于根据所述垃圾箱的位置信 息以及垃圾箱内的垃圾的重量进行线路规划,所述服务器根据线路规划形成需求指令。 在其中一个实施例中,所述路线规划单元采用单任务路程最短规划原则或单任务 垃圾处理重量最大规划原则进行线路规划。 在其中一个实施例中,所述垃圾箱设置有重量传感器以及传感器信号采集器,所 述重量传感器用于检测垃圾箱内的垃圾的重量,所述传感器信号采集器与所述重量传感器 相连,所述传感器信号采集器与所述服务器无线连接,所述传感器信号采集器用于采集垃 圾的重量数据并将重量数据发送给所述服务器。 在其中一个实施例中,所述垃圾箱还设置有声光报警器,所述声光报警器与所述 传感器信号采集器相连,所述声光报警器用于提醒该垃圾箱内垃圾的重量已经达到预设 值,所述传感器信号采集器在垃圾箱内的垃圾重量达到预设值后向服务器发送报警信息。 在其中一个实施例中,所述垃圾箱前的地面预设多个磁钉,用于无人驾驶垃圾车 自动抓取垃圾箱内垃圾时的精确定位,所述无人驾驶垃圾车包括:主控器、导航系统、精确 定位模块、多轴机械手、电源、电源控制系统以及无线传输模块, 所述主控器分别与所述导航系统、精确定位模块、多轴机械手、电源控制系统以及 无线传输模块相连,所述电源控制系统与所述电源相连, 所述导航系统用于引导无人驾驶垃圾车行驶至需要处理的垃圾箱的位置, 所述精确定位模块包括4个正交分布的磁感应传感器,所述精确定位模块用于与 所述多个磁钉配合,进而引导所述无人驾驶垃圾车与需要处理的垃圾箱进行精确对位, 所述多轴机械手用于将需要处理的垃圾箱内的垃圾转移至所述垃圾中转箱内。 在其中一个实施例中,还包括充电区,所述充电区设置有无人驾驶垃圾车充电装 置,所述无人驾驶垃圾车充电装置用于给所述无人驾驶垃圾车充电,所述服务器存储有所 述无人驾驶垃圾车充电装置的位置信息。 在其中一个实施例中,所述无人驾驶垃圾车充电装置前方的地面设置有多个磁 钉,所述精确定位模块用于与所述多个磁钉配合,进而引导所述无人驾驶垃圾车与所述无 人驾驶垃圾车充电装置精确对位。 在其中一个实施例中,还包括垃圾箱供电装置,所述垃圾箱供电装置与所述垃圾 箱相连。 在其中一个实施例中,所述垃圾处理站设置有垃圾回收机构,所述垃圾回收机构 用于将所述无人驾驶垃圾车的垃圾中转箱内的垃圾进行回收。 附图说明 图1为本发明的实施例的公园垃圾智能化综合管理系统的示意图。 图2为本发明的实施例的无人驾驶垃圾车的示意图。 图3为本发明的实施例的垃圾箱的示意图。 图4为本发明的实施例的传感器信号采集器、重量传感器、声光报警器的电路连接 5 CN 111591637 A 说 明 书 3/8 页 原理图。 图5为本发明的实施例的无人驾驶垃圾车上的元器件的电路连接原理图。 其中: 10、磁钉 100、调度站 110、服务器 120、无人驾驶垃圾车 121、垃圾中转箱 122、多轴机械手 123、导航系统 124、精确定位模块 200、垃圾处理站 210、垃圾回收机构 300、充电区 310、充电装置 400、垃圾箱 410、架体 420、箱体











