
技术摘要:
本发明属于电池能源管理领域,具体涉及一种燃料电池混合动力系统能源管理策略,该管理策略用于对质子交换膜燃料电池/锂电池混合动力系统的功率进行分配,具有这样的特征:根据能源管理控制器的输入变量的不同状态,该输入变量包括功率需求Pdem和电池荷电状态SOC,划分 全部
背景技术:
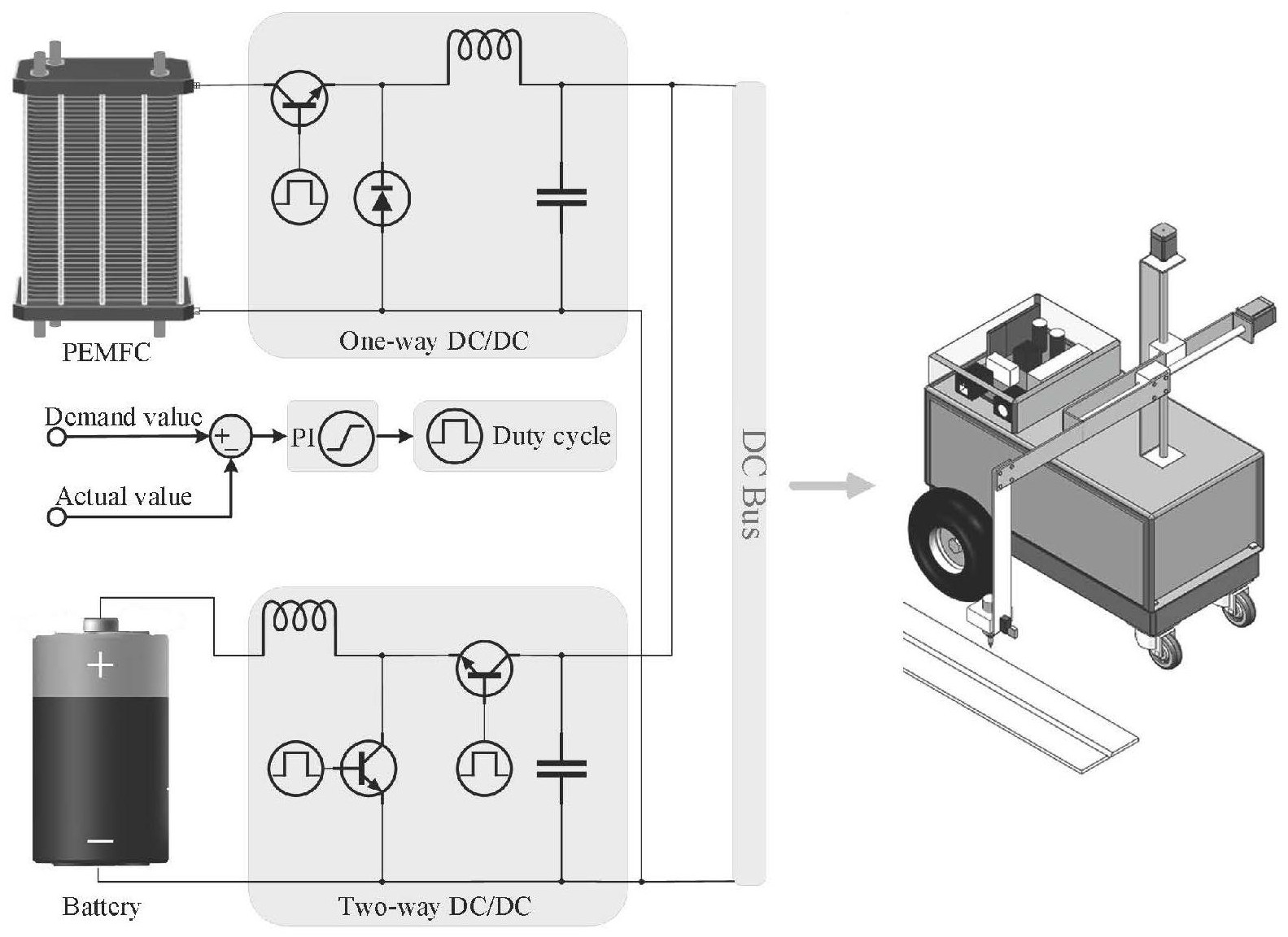
随着科学技术的发展,焊接作为一门综合性应用技术,已经从一种传统的热加工 工艺发展成为及材料、冶金、结构、力学、机械以及电子等多门类学科为一体的材料连接及 成型技术,从几吨重的汽车到不足一克的电子元件,在生产制造中都不同程度地利用焊接 技术。由于焊接烟尘、弧光、金属飞溅的存在,焊接的工作环境又非常恶劣,并且焊接质量的 好坏对产品质量起决定性的影响,这些促使了焊接机器人的出现和热销。目前焊接机器人 已经占据了整个工业机器人总量的40%以上,对于稳定焊接质量,提高了劳动生产率,改善 工人劳动条件意义重大。 基于电缆供电的驱动方式限制了焊接机器人的移动范围,不利于大型工件的焊 接。而采用可充电式电池供电时,由于电池充电时间长,并在供电时间方面有一定局限性, 焊接机器人无法持续完成长时间长距离的作业。 针对机器人传统电能能源所存在的局限性,采用新型能源来代替传统电能能源应 用于焊接机器人动力驱动系统中。其中,新型清洁能源机器人,特别是质子交换膜燃料电池 (PEMFC)机器人受到了业界的广泛关注。PEMFC作为一种新型环保型电池能源,可为动力系 统提供一个良好的供电方案。但是,PEMFC能源也有一定的局限性,其输出特性偏软,动态响 应能力较差且具有一定时滞性,不支持能量流的双向流动,也不能回收电机制动回馈的电 能。因此,需要增加辅助动力源,例如锂电池(LIB)和超级电容(SC)等,和PEMFC共同构成多 能源混合动力系统为负载需求提供能量,以实现整个系统对能量的高效利用。而对于混合 动力系统,往往存在PEMFC动态响应不足和元件使用寿命有限的问题,因此,如何合理有效 地分配负载功率成为了研究的重点和难点。
技术实现要素:
本发明是为了解决上述问题而进行的,目的在于提供一种燃料电池混合动力系统 能源管理策略。 本发明提供了一种燃料电池混合动力系统能源管理策略,用于对质子交换膜燃料 电池/锂电池混合动力系统的功率进行分配,具有这样的特征:根据能源管理控制器的输入 变量的不同状态,划分9种不同的规则来输出质子交换膜燃料电池功率PFC,输入变量包括功 率需求Pdem和电池荷电状态SOC,其具体过程包括以下步骤: 步骤1,以质子交换膜燃料电池的最优输出区间为限将Pdem划分为高、正常、低三个 状态,最优输出区间的上限PFCmax和下限PFCmin分别设为500W和200W,将SOC的上限SOCmax和下 限SOCmin分别设为85%和45%,从而将SOC划分为高、正常、低三个状态,基于Pdem和SOC的不 同状态将PFC分为以下9种: 4 CN 111591151 A 说 明 书 2/6 页 (1)State 1:Pdem>PFCmax且高SOC,此时PFC=PFCmax,且锂电池加速放电; (2)State 2:Pdem>PFCmax且正常SOC,此时PFC=PFCmax,且剩余的需求能量由锂电池进 行补充; (3)State 3:Pdem>PFCmax且低SOC,此时SOC很低,为保护锂电池,PFC>PFCmax,且PFC由模 糊控制器决定; (4)State 4:PFCmin











