
技术摘要:
本发明公开了一种移动控制方法、装置、存储介质及计算机设备,涉及人工智能技术领域,主要目的在于利用双轮移动的实际速度数据,得到实际线速度数据和实际角速度数据,对双轮速度数据进行修正,从而减小速度误差,并减小移动过程中的左右摆动。所述方法包括:接收移动 全部
背景技术:
移动机器人,是一个集环境感知、导航与路径规划、移动控制等多功能于一体的综 合系统。移动机器人既可以接受人类远程遥控指挥,又可以根据环境自主做出行为决策,从 而完成指定任务。其主要作用是协助或取代人类的部分危险、疲劳和重复性的工作,目前广 泛用于时间长、强度大、环境条件恶劣并且危险性大的工作领域上。 目前,大多数双差动轮驱动的移动机器人,都采用左右轮完全解耦的方式控制轮 子转速,即直接将机器人的移动线速度和角速度分解为左右轮速度。这样的做法非常简便, 容易实现,但是缺点是由于左右轮阻力不同、动态响应特性有差别,导致实际左右轮的合成 速度与期望的合成速度有差别,这一差别将导致移动误差的产生,增加移动过程中的左右 摆动幅度。
技术实现要素:
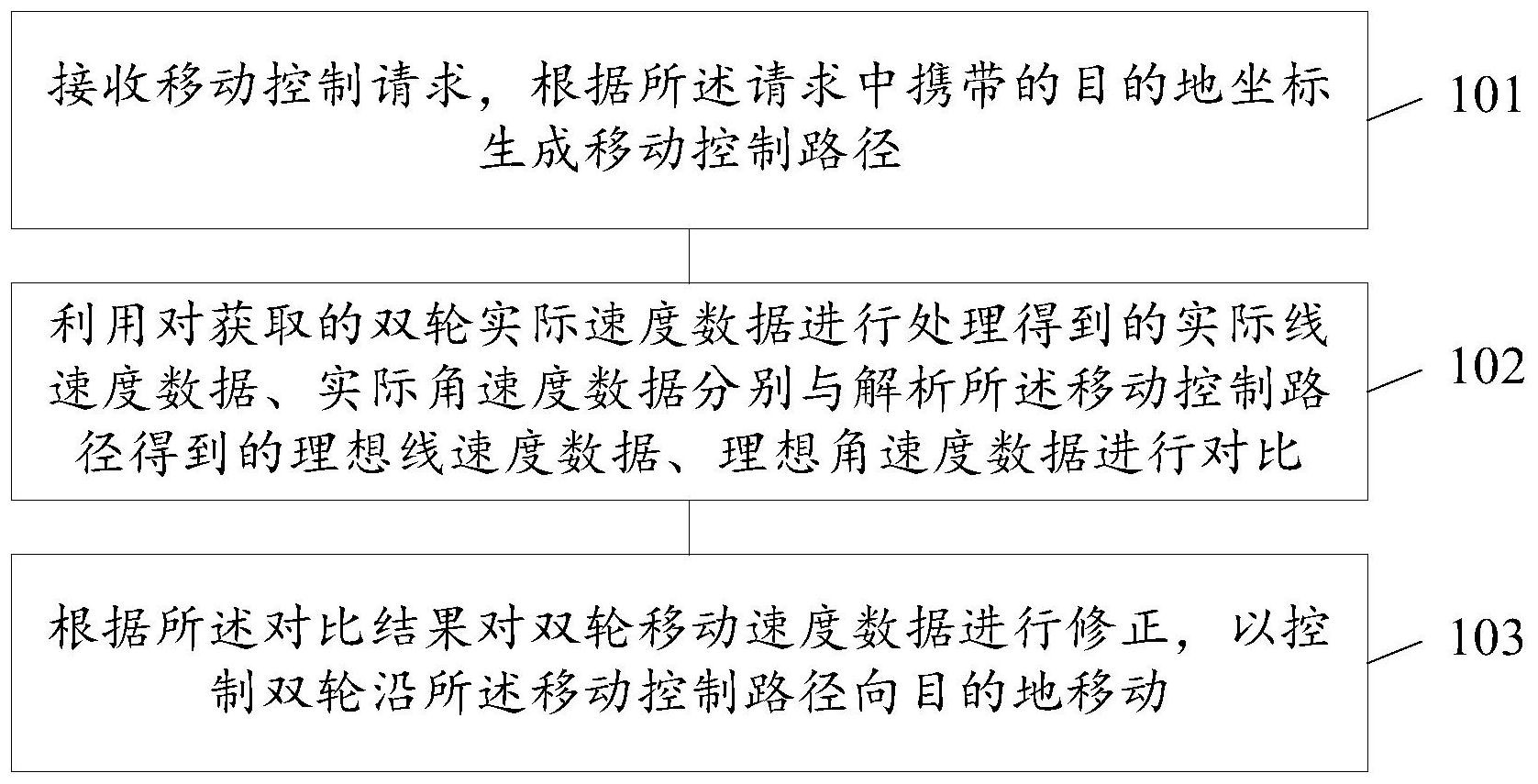
有鉴于此,本发明提供一种移动控制方法、装置、存储介质及计算机设备,主要目 的在于能够利用双轮移动的实际速度数据,得到实际线速度数据和实际角速度数据,通过 对比实际线速度数据、实际角速度数据与理想线速度数据、理想角速度数据,进而对双轮速 度进行修正,从而减小移动产生的速度误差,并减小移动过程中产生的左右摆动。 依据本发明一个方面,提供了一种移动控制方法,包括: 接收移动控制请求,根据所述请求中携带的目的地坐标生成移动控制路径; 利用对获取的双轮实际速度进行处理得到的实际线速度数据、实际角速度数据分 别与解析所述移动控制路径得到的理想线速度数据、理想角速度数据进行对比,得到对比 结果; 根据所述对比结果对双轮移动速度数据进行修正,以控制双轮沿所述移动控制路 径向目的地移动。 进一步地,解析所述移动控制路径,得到所述路径中转点及转点间直线对应的理 想线速度数据、理想角速度数据以及转点坐标; 利用预设的理想速度算法对所述理想线速度数据和理想角速度数据进行处理,得 到双轮在各转点及转点间直线的理想速度数据; 利用预设的实际线速度算法和实际角速度算法对获取的双轮实际速度数据进行 处理,得到实际线速度数据和实际角速度数据; 将所述实际线速度数据、所述实际角速度数据分别与所述理想线速度数据、所述 理想角速度数据进行对比; 若所述实际线速度数据与所述理想线速度数据不相等,和/或所述实际角速度数 5 CN 111580512 A 说 明 书 2/14 页 据与所述理想角速度数据不相等,则根据预设的修正算法对所述双轮实际速度数据进行修 正,使所述实际线速度数据、所述实际角速度数据分别与所述理想线速度数据、所述理想角 速度数据相等。 进一步地,所述利用预设的理想速度算法对所述理想线速度数据和理想角速度数 据进行处理,得到双轮在各转点及转点间直线的理想速度数据,包括: 根据预设的理想速度算法,对获取的理想线速度数据、理想角速度数据以及双轮 轮轴长度数据进行处理,得到第一理想速度数据和第二理想速度数据,所述预设的理想速 度算法,包括: 其中:v *1 为第一理想速度,v *2 为第二理想速度,v*为理想线速度,w*为理想角速度, l为双轮轮轴长度。 进一步地,所述利用预设的实际线速度算法和实际角速度算法对获取的双轮实际 速度数据进行处理,得到实际线速度数据和实际角速度数据,包括: 利用预设的实际线速度算法对获取的第一实际速度数据、第二实际速度数据进行 处理,得到实际线速度数据,所述预设的实际线速度算法,包括: 其中:v1为第一实际速度,v2为第二实际速度,v为实际线速度; 利用预设的实际角速度算法对获取的第一实际速度数据、第二实际速度数据以及 双轮轮轴长度数据进行处理,得到实际角速度数据,所述预设的实际角速度算法,包括: 其中:v1为第一实际速度,v2为第二实际速度,w为实际角速度,l为双轮轮轴长度。 进一步地,所述若所述实际线速度数据与所述理想线速度数据不相等,和/或所述 实际角速度数据与所述理想角速度数据不相等,则根据预设的修正算法对所述双轮实际速 度数据进行修正,使所述实际线速度数据、所述实际角速度数据分别与所述理想线速度数 据、所述理想角速度数据相等,包括: 根据预设的修正算法,对第一理想速度数据、第二理想速度数据、理想线速度数 据、理想角速度数据、实际线速度数据和实际角速度数据进行处理,得到第一修正速度数据 和第二修正速度数据,所述预设的修正算法,包括: 其中:所述 为第一修正速度,所述 为第二修正速度,v *1 为第一理想速度,v *2 为 6 CN 111580512 A 说 明 书 3/14 页 第二理想速度,v*为理想线速度,w*为理想角速度,v为实际线速度,w为实际角速度。 进一步地,所述利用预设的实际线速度算法和实际角速度算法对获取的双轮实际 速度数据进行处理,得到实际线速度数据和实际角速度数据,包括: 解析安置于双轮上的编码器记录的脉冲信号,将所述脉冲信号转化为双轮移动的 位移数据; 将所述位移数据与脉冲信号时间差的商确定为双轮移动的实际速度数据。 进一步地,所述根据所述对比结果对双轮移动速度进行修正,以控制双轮沿所述 移动控制路径向目的地移动,包括: 通过分别安置于双轮上的第一驱动电机和第二驱动电机,按照所述第一修正速度 和第二修正速度对双轮进行速度修正。 进一步地,所述解析所述移动控制路径,得到所述路径中转点及转点间直线对应 的理想线速度数据、理想角速度数据以及转点坐标,包括: 解析所述移动控制路径,得到所述路径中转点对应的角度数据; 在本地预先建立的数据库中检索所述角度数据对应的理想角速度数据。 依据本发明第二方面,提供了一种移动控制装置,包括: 生成单元,用于接收移动控制请求,根据所述请求中携带的目的地坐标生成移动 控制路径; 修正单元,用于控制双轮沿所述移动控制路径进行移动,并实时对双轮移动速度 数据进行修正。 进一步地,所述修正单元包括: 解析模块,用于解析所述移动控制路径,得到所述路径中转点及转点间直线对应 的理想线速度数据、理想角速度数据以及转点坐标; 第一处理模块,用于利用预设的理想速度算法对所述理想线速度数据和理想角速 度数据进行处理,得到双轮在各转点及转点间直线的理想速度数据; 第二处理模块,用于利用预设的实际线速度算法和实际角速度算法对获取的双轮 实际速度数据进行处理,得到实际线速度数据和实际角速度数据; 对比模块,用于将所述实际线速度数据、所述实际角速度数据分别与所述理想线 速度数据、所述理想角速度数据进行对比; 修正模块,用于若所述实际线速度数据与所述理想线速度数据不相等,和/或所述 实际角速度数据与所述理想角速度数据不相等,则根据预设的修正算法对所述双轮实际速 度数据进行修正,使所述实际线速度数据、所述实际角速度数据分别与所述理想线速度数 据、所述理想角速度数据相等; 可选地,所述第一处理模块具体用于根据预设的理想速度算法,对获取的理想线 速度数据、理想角速度数据以及双轮轮轴长度数据进行处理,得到第一理想速度数据,所述 预设的理想速度算法,包括: 所述第一处理模块具体还用于根据预设的理想速度算法,对获取的理想线速度数 据、理想角速度数据以及双轮轮轴长度数据进行处理,得到第二理想速度数据,所述预设的 7 CN 111580512 A 说 明 书 4/14 页 理想速度算法,还包括: 其中:v *1 为第一理想速度,v *2 为第二理想速度,v*为理想线速度,w*为理想角速度, l为双轮轮轴长度。 进一步地, 所述第二处理模块具体用于利用预设的实际线速度算法对获取的第一实际速度 数据、第二实际速度数据进行处理,得到实际线速度数据,所述预设的实际线速度算法,包 括: 其中:v1为第一实际速度,v2为第二实际速度,v为实际线速度; 所述第二处理模块具体还用于利用预设的实际角速度算法对获取的第一实际速 度数据、第二实际速度数据以及双轮轮轴长度数据进行处理,得到实际角速度数据,所述预 设的实际角速度算法,包括: 其中:v1为第一实际速度,v2为第二实际速度,w为实际角速度,l为双轮轮轴长度。 进一步地,所述修正模块具体用于根据预设的修正算法,对第一理想速度数据、第 二理想速度数据、理想线速度数据、理想角速度数据、实际线速度数据和实际角速度数据进 行处理,得到第一修正速度数据和第二修正速度数据,所述预设的修正算法,包括: 其中:所述 为第一修正速度,所述 为第二修正速度,v *1 为第一理想速度,v *2 为 第二理想速度,v*为理想线速度,w*为理想角速度,v为实际线速度,w为实际角速度。 进一步地,所述第二处理模块具体还用于解析安置于双轮上的编码器记录的脉冲 信号,将所述脉冲信号转化为双轮移动的位移数据; 所述第二处理模块具体还用于将所述位移数据与脉冲信号时间差的商确定为双 轮移动的实际速度。 进一步地,所述修正模块具体还用于通过安置于双轮上的第一电机,按照所述第 一修正速度数据对第一移动轮进行速度修正。 所述修正模块具体还用于通过安置于双轮上的第二电机,按照所述第二修正速度 数据第二移动轮进行速度修正。 进一步地,所述解析模块具体还用于解析所述移动控制路径,得到所述路径中转 点对应的角度数据; 所述解析模块具体还用于在本地预先建立的数据库中检索所述角度数据对应的 理想角速度数据。 8 CN 111580512 A 说 明 书 5/14 页 依据本发明第三方面,提供了一种存储介质,所述存储介质中存储有至少一可执 行指令,所述执行指令使处理器执行以下步骤:接收移动控制请求,根据所述请求中携带的 目的地坐标生成移动控制路径;利用对获取的双轮实际速度数据进行处理得到的实际线速 度数据、实际角速度数据分别与解析所述移动控制路径得到的理想线速度数据、理想角速 度数据进行对比,得到对比结果;根据所述对比结果对双轮移动速度数据进行修正,以控制 双轮沿所述移动控制路径向目的地移动。 依据本发明第四方面,提供了一种计算机设备,包括处理器、存储器、通信接口和 通信总线所述处理器、所述存储器和所述通信接口通过所述通信总线完成相互间的通信, 所述存储器用于存放至少一可执行指令,所述可执行指令使所述处理器执行以下步骤:接 收移动控制请求,根据所述请求中携带的目的地坐标生成移动控制路径;利用对获取的双 轮实际速度数据进行处理得到的实际线速度数据、实际角速度数据分别与解析所述移动控 制路径得到的理想线速度数据、理想角速度数据进行对比,得到对比结果;根据所述对比结 果对双轮移动速度数据进行修正,以控制双轮沿所述移动控制路径向目的地移动。 本发明提供一种移动控制方法、装置、存储介质及计算机设备,与现有技术采用左 右轮完全解耦的方式控制轮子转速,即直接将机器人的移动线速度和角速度分解为左右轮 速度相比,本发明通过接收移动控制请求,根据所述请求中携带的目的地坐标生成移动控 制路径;利用对获取的双轮实际速度数据进行处理得到的实际线速度数据、实际角速度数 据分别与解析所述移动控制路径得到的理想线速度数据、理想角速度数据进行对比,得到 对比结果;根据所述对比结果对双轮移动速度数据进行修正,以控制双轮沿所述移动控制 路径向目的地移动。从而能够能够利用双轮移动的实际速度,得到实际线速度和实际角速 度,通过对比实际线速度数据、实际角速度数据与理想线速度数据、理想角速度数据,进而 对双轮速度数据进行修正,从而减小移动产生的速度误差,并减小移动过程中产生的左右 摆动。 上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段, 而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够 更明显易懂,以下特举本发明的











