
技术摘要:
本发明提供一种基于RGB‑D信息的室内占据栅格地图的制备方法,涉及机器人室内导航技术领域。该基于RGB‑D信息的室内占据栅格地图的制备方法,包括加载全局三维点云地图、地面和非地面点云分割、地面和非地面点云处理以及生成二维占据栅格地图等。本发明,制备的室内地 全部
背景技术:
机器人地图有多种分类方式,包括尺度地图、拓扑地图和语义地图等。其中尺度地 图中的占据栅格地图应用最为广泛,可实现室内导航和避障等关键任务需求。通过将室内 环境均分成一定数量和大小的栅格,以栅格内是否包含室内结构信息或障碍物为基准,衡 量该栅格是否被占据,由此可将室内地图划分为可通行区域与不可通行区域。 传统的室内占据栅格地图生成方法使用多线激光雷达,对室内环境进行扫描可获 得丰富的点云数据,点云即是最直接的表征占据栅格状态的室内结构信息存储形式,此方 法精度高且操作简单,但由于激光雷达高额的造价成本,限制了消费级市场的需求。因此本 发明参考视觉SLAM技术方案,采用RGB-D相机作为数据采集终端,通过多种点云处理算法完 成室内栅格占据地图的制备。
技术实现要素:
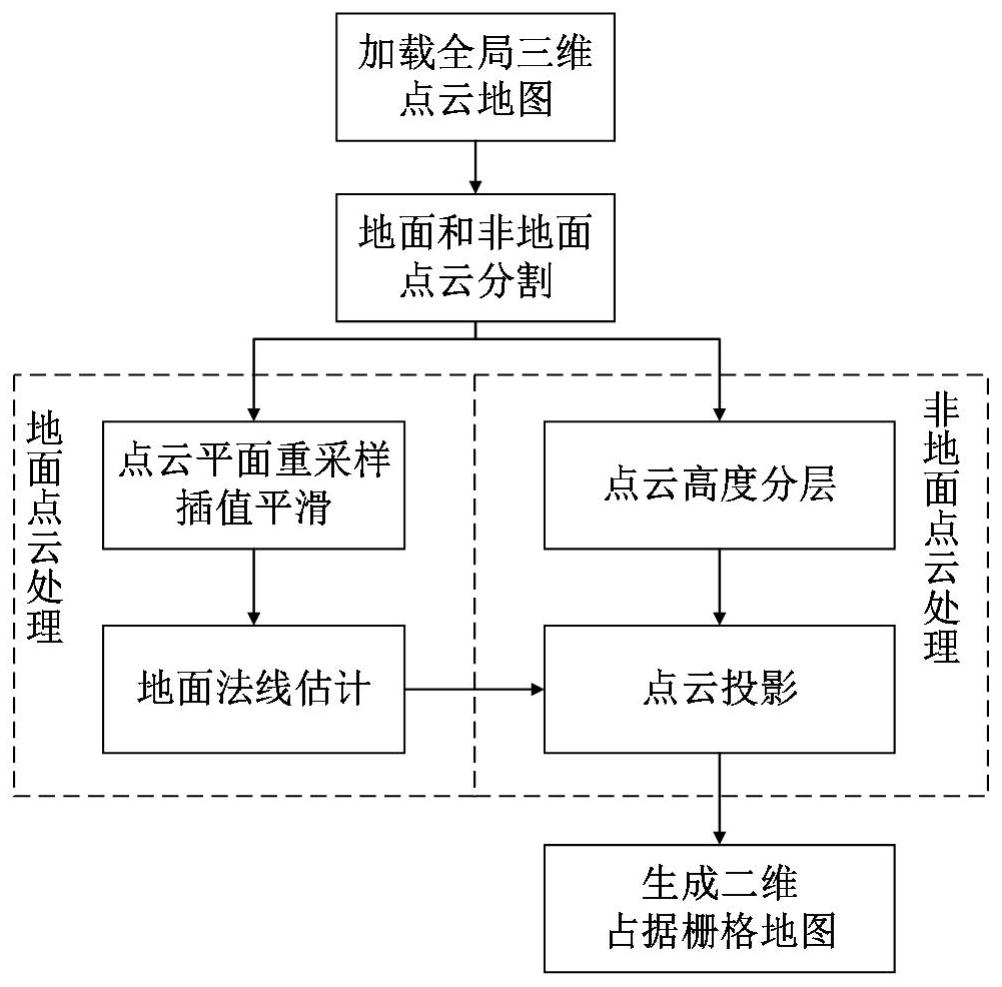
(一)解决的技术问题 针对现有技术的不足,本发明提供了一种基于RGB-D信息的室内占据栅格地图的 制备方法,解决了现有技术中存在的缺陷与不足。 (二)技术方案 为实现以上目的,本发明通过以下技术方案予以实现:一种基于RGB-D信息的室内 占据栅格地图的制备方法,所述制备方法包括以下步骤: S1、使用Kinect相机同时采集室内场景的彩色图和深度图序列,对单对彩色图和 深度图,结合相机姿态、相机模型参数和深度相机采集的深度信息计算得出点云的空间位 置信息,即可生成局部的单帧点云; S2、采用体素化滤波器来精简点云,通过把点云空间划分成一定数量和大小的空 间栅格,用一个重心点代替栅格内的所有其他点来达到点云精简; S3、采用渐进式形态学滤波进行点云分割,基于膨胀算子和腐蚀算子,对每个包含 有一定栅格的窗口进行先腐蚀,后膨胀的开运算,可以提取窗口内的点云最低点,用作地面 和非地面点云判别,然后不断增加滤波器窗口的尺寸和地面点云的判别阈值,最终能提取 出全部的地面点云,实现分割; S4、采用移动最小二乘法对分离出的地面点云进行2阶多项式拟合,KD-Tree作为 近邻搜索方法,设定足够大的拟合半径,进行插值和重采样,以达到规整地面点云、降低曲 率分布的效果,然后通过求解近邻点集的协方差矩阵的特征向量和特征值来进行法线估 计; S5、三维的非地面点云表征了室内环境信息,在高度方向截取多个高度层级的非 3 CN 111598916 A 说 明 书 2/5 页 地面点云,结合法线方程分别投影至二维平面,扫描并查询每个栅格内是否存在点云,分别 赋值1和0表示该处是否被障碍物占据,在之后的观测状态更新后也进行栅格占据地图的更 新,用概率形式表达被占据的可能性,以一个介于0和1之间的动态浮点数来表示,建立动态 的占据栅格地图模型。 优选的,所述步骤1中借由成熟的SLAM技术,用于在构建两帧点云的同时精确计算 点云的坐标变换矩阵,将新生成的单帧点云对齐到同一世界坐标系下,完成全局三维点云 地图的拼接生成。 优选的,所述步骤2中采用点云处理算法中的直通滤波器来去除室外的不规则点 云;采用半径搜索滤波器在点云中搜索并计算其近邻点的数目,若少于阈值则判断为离群 噪声点并去除,由此完成点云地图的精简和去噪等预处理。 (三)有益效果 本发明提供了一种基于RGB-D信息的室内占据栅格地图的制备方法。具备以下有 益效果: 1、本发明,制备的室内地图精度逼近激光雷达式生成方法,且拥有比激光雷达更 低的成本,具备较高的实用价值。 2、本发明,生成的不同高度层级的二维占据栅格地图可以应对不同工作高度的机 器人导航需求。 附图说明 图1为本发明流程图; 图2为本发明相机投影模型示意图; 图3为本发明预处理后的室内三维点云地图示意图; 图4为本发明地面与非地面点云分割效果图; 图5为本发明平滑处理后地面点云曲率分布图; 图6为本发明生成三个高度层级的占据栅格地图。











