
技术摘要:
本申请涉及一种物体转移装箱过程策略生成方法、装置、计算机设备。该方法包括:获取初始容器中待装箱物体集合的优先级图;优先级图用于描述待装箱物体集合中每个待装箱物体之间的依赖约束;通过对优先级图进行编码,得到每个待装箱物体在预设状态下的几何信息和依赖信 全部
背景技术:
装箱问题是众所周知的离散优化问题,已经在计算机图形学领域中被发现了引人 注目的几何应用,例如纹理图生成、艺术排版、二维面板制造和三维打印等。然而,在其他涉 及物理对象的实际应用中(如机器人装箱运输等),通常还必须应对更多的约束条件。物理 装箱问题的一个重要变化是,在初始时,物体就已经处于某种空间配置中了(如,积累的仓 库库存等)。物体的移动必须遵循一些先后顺序,比如压在某个物体上面的物体被转移并装 箱之前,前者无法被移动。因此,在实际物理对象装箱应用中,装箱过程对物体最终的装箱 状态的影响至关重要。 然而,几何装箱问题中,仅需优化虚拟对象的装箱效果,以用于显示、存储或制造 等场景中。在物理装箱问题中,初始状态对物品的装箱顺序和朝向有严格的约束;现有装箱 技术通过假定提供的待装箱物体没有任何额外的空间或依赖约束进行装箱,得到的装箱效 果仅具有装箱结果显示,实际装箱过程,需要花费时间根据装箱效果分析如何搬运,导致物 体装箱效率低。
技术实现要素:
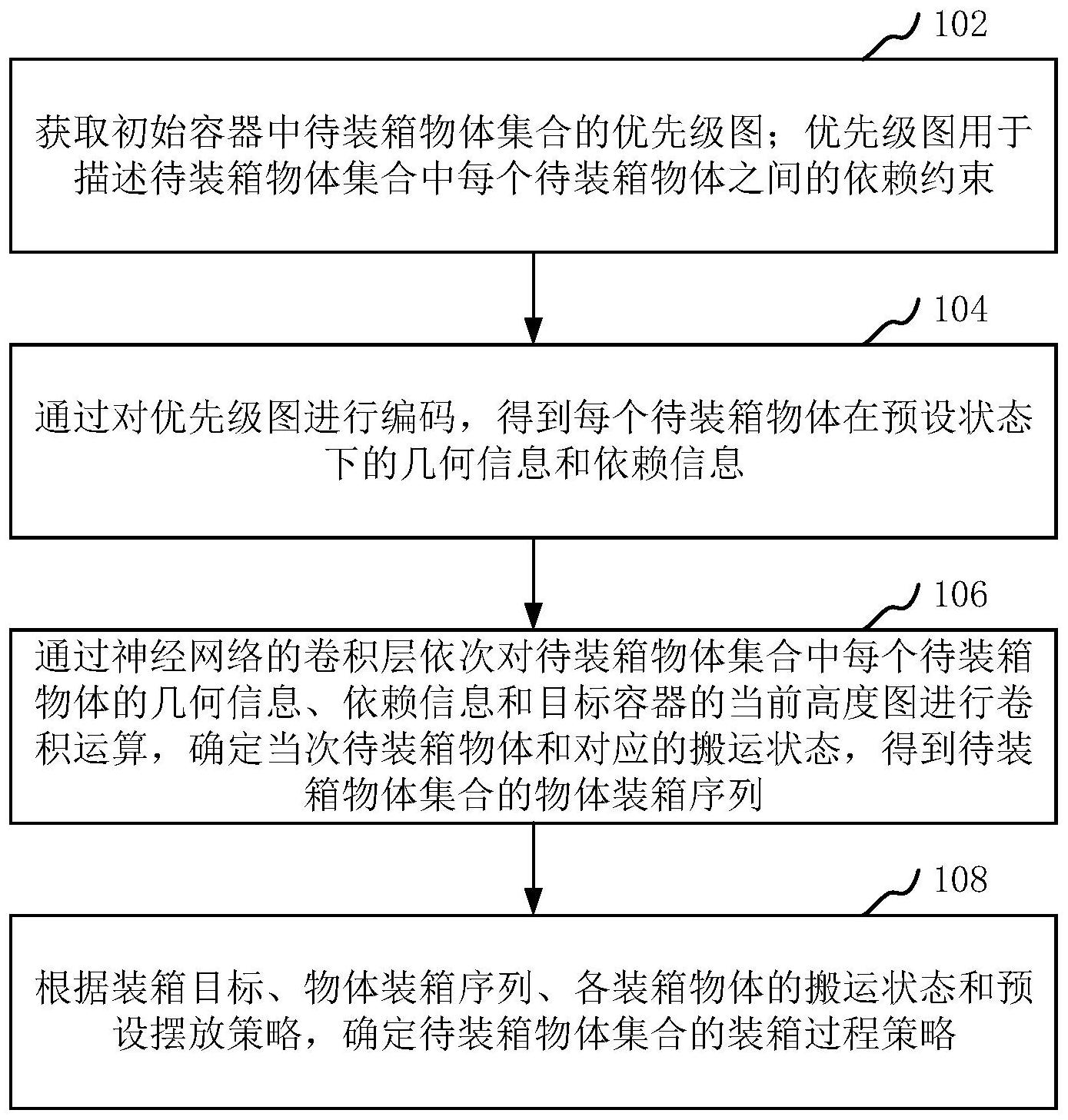
基于此,有必要针对上述技术问题,提供一种能够提高物体转移装箱效率的物体 转移装箱过程策略生成方法、装置、计算机设备和存储介质。 一种物体转移装箱过程策略生成方法,所述方法包括: 获取初始容器中待装箱物体集合的优先级图;所述优先级图用于描述所述待装箱 物体集合中每个待装箱物体之间的依赖约束; 通过对所述优先级图进行编码,得到所述每个待装箱物体在预设状态下的几何信 息和依赖信息; 通过神经网络的卷积层依次对待装箱物体集合中每个待装箱物体的几何信息、依 赖信息和目标容器的当前高度图进行卷积运算,确定当次待装箱物体和对应的搬运状态, 得到所述待装箱物体集合的物体装箱序列; 根据装箱目标、所述物体装箱序列、各装箱物体的搬运状态和预设摆放策略,确定 所述待装箱物体集合的装箱过程策略。 在一个实施例中,所述获取初始容器中待装箱物体集合的优先级图包括: 获取初始容器中待装箱物体集合中每个待装箱物体的初始位置信息和初始几何 信息; 根据所述初始位置信息和所述始几何信息对所述待装箱物体集合中每个待装箱 物体进行几何分析,确定所述待装箱物体集合的优先级图。 4 CN 111598316 A 说 明 书 2/15 页 在一个实施例中,所述根据所述初始位置信息和所述始几何信息对所述待装箱物 体集合中每个待装箱物体进行几何分析,确定所述待装箱物体集合的优先级图包括: 根据所述初始位置信息和所述始几何信息对所述待装箱物体集合中每个待装箱 物体每个方向进行遍历,确定每个方向的限制状态; 根据所述限制状态,确定所述待装箱物体集合的优先级图。 在一个实施例中,所述通过神经网络的卷积层依次对待装箱物体集合中每个待装 箱物体的几何信息、动态信息和目标容器的当前高度图进行卷积运算,确定当次待装箱物 体和对应的搬运状态,得到待装箱物体集合的物体装箱序列包括: 通过神经网络中编码器对所述每个待装箱物体的几何信息和依赖信息进行卷积 运算,将运算结果映射到高维空间得到对应的第一高维向量; 通过神经网络中解码器对上一个装箱物体的几何信息、目标容器的当前高度图进 行卷积运算,将运算结果映射到高维空间得到对应的第二高维向量; 根据所述第一高维向量和所述第二高维向量,确定所述每个待装箱物体在预设状 态下的装箱概率值; 根据所述装箱概率值确定当次待装箱物体和对应的搬运状态,得到待装箱物体集 合的物体装箱序列。 在一个实施例中,在所述确定当次待装箱物体和对应的搬运状态之后,所述方法 还包括: 将确定的当次待装箱物体从所述待装箱物体集合移除; 更新所述待装箱物体集合的优先级图和所述目标容器的当前高度图,执行所述获 取初始容器中待装箱物体集合的优先级图步骤。 在一个实施例中,所述根据装箱目标、所述物体装箱序列、各装箱物体的搬运状态 和预设摆放策略,确定所述当前装箱过程策略包括: 根据装箱目标、所述物体装箱序列和各装箱物体的搬运状态,计算所述待装箱物 体集合在预设摆放策略集中每个预设摆放策略下的装箱目标值; 根据所述装箱目标值从所述预设摆放策略集中确定所述待装箱物体集合的目标 摆放策略。 在一个实施例中,所述装箱目标包括密度目标、锥形程度目标和稳定性目标中至 少一种;所述根据装箱目标、所述物体装箱序列和各装箱物体的搬运状态,计算所述待装箱 物体集合在预设摆放策略集中每个预设摆放策略下的装箱目标值包括: 根据所述物体装箱序列、各装箱物体的搬运状态和所述预设摆放策略将所述待装 箱物体集合中每个待装箱物体依次装箱到所述目标容器中; 根据所述装箱目标计算装箱后所述目标容器对应的密度值、锥形程度值和稳定性 值; 根据所述密度值、锥形程度值和稳定性值计算预设摆放策略集中每个预设摆放策 略对应的装箱目标数值。 一种物体转移装箱过程策略生成装置,所述装置包括: 获取模块,用于获取初始容器中待装箱物体集合的优先级图;所述优先级图用于 描述所述待装箱物体集合中每个待装箱物体之间的依赖约束; 5 CN 111598316 A 说 明 书 3/15 页 编码模块,用于通过对所述优先级图进行编码,得到所述每个待装箱物体在预设 状态下的几何信息和依赖信息; 卷积模块,用于通过神经网络的卷积层依次对待装箱物体集合中每个待装箱物体 的几何信息、依赖信息和目标容器的当前高度图进行卷积运算,确定当次待装箱物体和对 应的搬运状态,得到待装箱物体集合的物体装箱序列; 确定模块,用于根据装箱目标、所述物体装箱序列、各装箱物体的搬运状态和预设 摆放策略,确定所述待装箱物体集合的装箱过程策略。 一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理 器执行所述计算机程序时实现以下步骤: 获取初始容器中待装箱物体集合的优先级图;所述优先级图用于描述所述待装箱 物体集合中每个待装箱物体之间的依赖约束; 通过对所述优先级图进行编码,得到所述每个待装箱物体在预设状态下的几何信 息和依赖信息; 通过神经网络的卷积层依次对待装箱物体集合中每个待装箱物体的几何信息、依 赖信息和目标容器的当前高度图进行卷积运算,确定当次待装箱物体和对应的搬运状态, 得到待装箱物体集合的物体装箱序列; 根据装箱目标、所述物体装箱序列、各装箱物体的搬运状态和预设摆放策略,确定 所述待装箱物体集合的装箱过程策略。 一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执 行时实现以下步骤: 获取初始容器中待装箱物体集合的优先级图;所述优先级图用于描述所述待装箱 物体集合中每个待装箱物体之间的依赖约束; 通过对所述优先级图进行编码,得到所述每个待装箱物体在预设状态下的几何信 息和依赖信息; 通过神经网络的卷积层依次对待装箱物体集合中每个待装箱物体的几何信息、依 赖信息和目标容器的当前高度图进行卷积运算,确定当次待装箱物体和对应的搬运状态, 得到待装箱物体集合的物体装箱序列; 根据装箱目标、所述物体装箱序列、各装箱物体的搬运状态和预设摆放策略,确定 所述待装箱物体集合的装箱过程策略。 上述物体转移装箱过程策略生成方法、装置、计算机设备和存储介质,通过获取初 始容器中待装箱物体集合的优先级图,对优先级图进行编码得到每个待装箱物体在预设状 态下的几何信息和依赖信息;通过神经网络的卷积层依次对待装箱物体集合中每个待装箱 物体的几何信息、依赖信息和目标容器的当前高度图进行卷积运算,得到待装箱物体集合 的物体装箱序列;根据装箱目标、物体装箱序列、各装箱物体的搬运状态和预设摆放策略 集,确定待装箱物体集合的装箱过程策略。由于装箱过程策略是根据物体装箱序列、各装箱 物体的搬运状态和预设摆放策略得到的,因此,装箱过程策略考虑了物体的装箱顺序,装箱 过程中的搬运状态以及转移后被摆放的位置,根据装箱过程策略即可对装箱工作进行指导 来解决了物体转移和装箱问题,提高了物体转移装箱效率。 6 CN 111598316 A 说 明 书 4/15 页 附图说明 图1为一个实施例中物体转移装箱过程策略生成方法的流程示意图; 图2为一个实施例中待装箱物体的初始搬运和旋转搬运对应的示意图; 图3为一个实施例中对待装箱物体几何信息和依赖信息的编码结果; 图4为一个实施例中物体转移装箱过程策略生成方法对应的装箱示意图; 图5为一个实施例中建立优先级图方法的流程示意图; 图6为一个实施例中建立优先级图的过程分析示意图; 图7为一个实施例中确定物体装箱序列方法的流程示意图; 图8为一个实施例中TAP-Net的网络结构图; 图9为一个实施例中确定目标摆放策略方法的流程示意图; 图10为一个实施例中密度值、锥形程度值和稳定性值的效果示意图; 图11为另一个实施例中物体转移装箱过程策略生成方法的流程示意图; 图12为一个实施例中物体转移装箱过程策略生成方法应用于滚动装箱的示意图; 图13为一个实施例中物体转移装箱到不同目标容器的示意图; 图14为一个实施例中物体转移装箱过程策略生成装置的结构框图; 图15为另一个实施例中物体转移装箱过程策略生成装置的结构框图; 图16为一个实施例中计算机设备的内部结构图。











