
技术摘要:
本发明公开了一种多功能自适应可控粘附软体机械手,包括:柔性弯曲驱动器,用于在压力腔室中气压的作用下,产生弯曲行为,以通过根据气压大小实现对不同曲率表面的目标接触;粘附承载层,用于通过负压软管在真空腔室中产生负压的作用,产生载荷均布效应以利用仿生粘附 全部
背景技术:
随着机器人技术向人机交互和人机共融的趋势发展,基于柔性材料的软体机械手 逐渐成为机器人技术的一个主要研究方向。传统的软体机械手主要利用气压驱动可拉伸变 形硅胶和不可拉伸限制层组成的驱动器实现弯曲变形,进而通过包覆作用或摩擦作用实现 对物体的抓取。由于软体机械手采用软材料制备而成,在外力驱动下可以实现连续变形,因 此具备良好的柔顺性、适应性和安全性,能够抓取多种复杂、易碎和柔性物体。 然而,基于包覆作用和摩擦作用的抓取形式要求抓取物体尺寸较小、特征突出等, 限制了软体机械手对于具有大面积、无特征、小曲率表面的物体抓取。
技术实现要素:
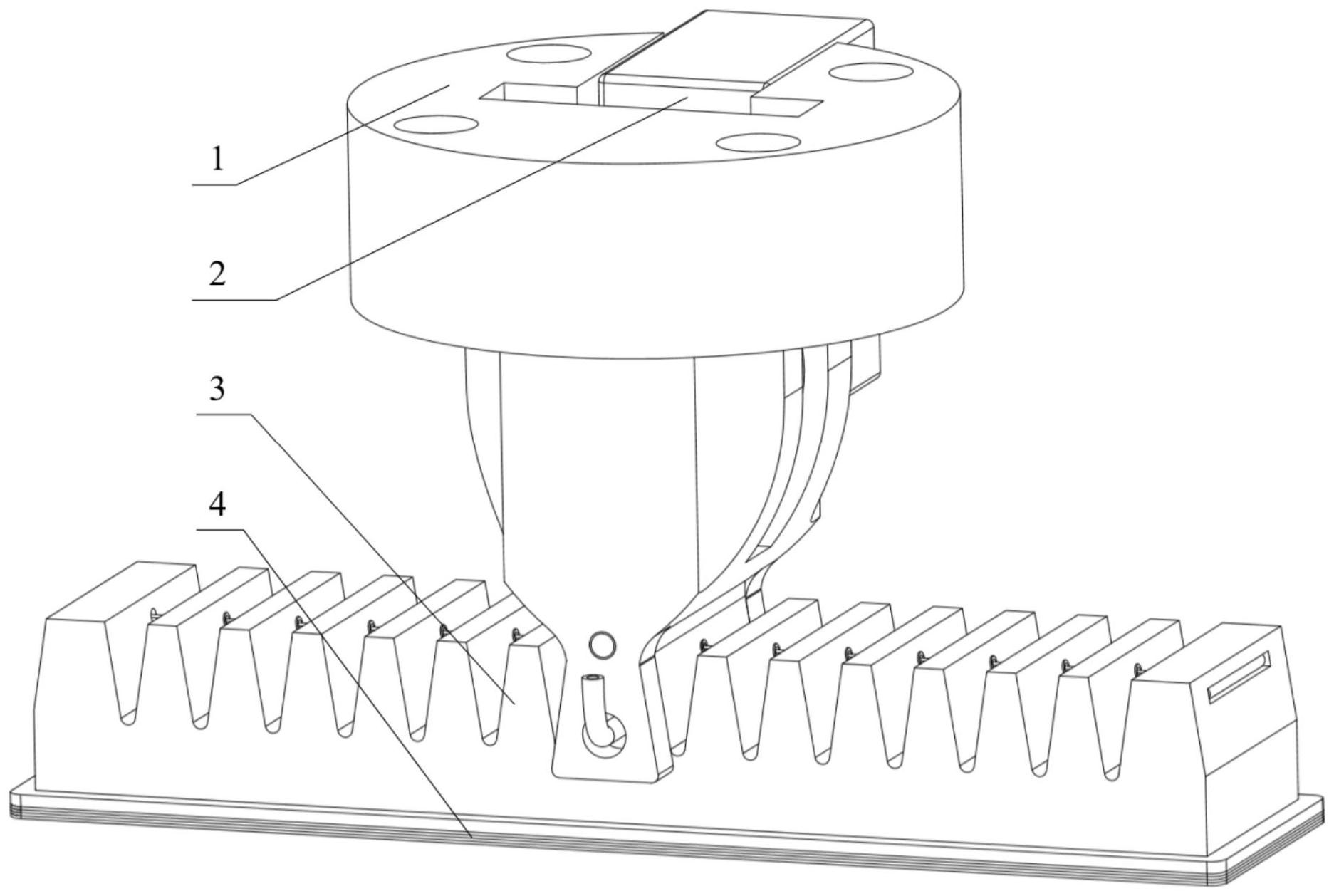
本发明旨在至少在一定程度上解决相关技术中的技术问题之一。 为此,本发明的目的在于提出一种多功能自适应可控粘附软体机械手,该机械手 可以实现对于多种曲率、多种面积、多种重量物体的多功能抓取和快速释放,扩大了软体机 械手的抓取范围和抓取能力。 为达到上述目的,本发明实施例提出了一种多功能自适应可控粘附软体机械手, 包括:柔性弯曲驱动器,用于在压力腔室中气压的作用下,产生弯曲行为,以通过根据气压 大小实现对不同曲率表面的目标接触;粘附承载层,用于通过负压软管在真空腔室中产生 负压的作用,产生载荷均布效应以利用仿生粘附表面的微结构产生的粘附力和摩擦力,达 到抓取承载能力;线绳脱附机构,用于通过舵机驱动线绳带动所述柔性弯曲驱动器外侧向 中间收缩,产生反向弯曲行为,实现从目标物体表面的剥离释放。 本发明实施例的多功能自适应可控粘附软体机械手,通过结合软体机器人技术和 仿生可控粘附技术,能够利用包覆作用、摩擦作用和粘附作用实现对于不同类型表面的适 应性抓取;通过负压作用形成的载荷均布效应,能够充分利用接触界面产生的摩擦力和粘 附力实现稳定性抓取;通过线绳驱动的反向弯曲运动,能够从抓取物体表面剥离实现快速 性脱附,利用上述三种功能,该机械手可以实现对于多种曲率、多种面积、多种重量物体的 多功能抓取和快速释放,扩大了软体机械手的抓取范围和抓取能力。 另外,根据本发明上述实施例的多功能自适应可控粘附软体机械手还可以具有以 下附加的技术特征: 进一步地,在本发明的一个实施例中,还包括:法兰盘底座,所述法兰盘底座由法 兰盘和承载轴组成,所述法兰盘上方具有法兰孔,通过螺钉连接与后端机械臂固定,上方具 有方形孔,通过胶接固定舵机位置;下方具有圆孔,与所述柔性弯曲驱动器中间部分过盈配 合,并通过所述承载轴连接。 3 CN 111546363 A 说 明 书 2/5 页 进一步地,在本发明的一个实施例中,所述承载轴两端安装有弹性挡圈,以限定所 述承载轴的轴向位置。 进一步地,在本发明的一个实施例中,还包括:线绳脱附机构,所述线绳脱附机构 由脱附舵机、舵盘、剥离线绳、套管和末端承载杆组成,所述脱附舵机机身安装在所述法兰 盘上方的方形孔内,所述脱附舵机转轴与所述舵盘轴向连接,所述舵盘具有环形槽状结构, 所述环形槽状结构与所述剥离线绳的一端固定,所述剥离线绳穿过多个套管,所述多个套 管与软体驱动器上的圆孔过盈配合,所述剥离线绳的另一端与末端承载杆固连,所述末端 承载杆嵌入所述软体驱动器上的凹槽内,与所述软体驱动器通过硅胶胶黏剂固连。 可选地,在本发明的一个实施例中,所述多个套管可以为自润滑材料制成。 进一步地,在本发明的一个实施例中,所述柔性弯曲驱动器由所述软体驱动器和 正压软管组成,所述软体驱动器中间部分具有方形圆孔结构,与所述法兰盘底座连接,且中 间内壁具有两个通孔,外侧的通孔穿过负压软管,内侧的通孔穿过所述正压软管,及两侧具 有多个梯形弯曲变形结构和圆孔,与所述多个套管过盈配合,所述多个梯形弯曲变形结构 内部高度从中间向外逐渐递减,所述正压软管一端穿过所述内侧通孔形成过盈配合,另一 端与外部气路连接,为正压腔室提供气压。 进一步地,在本发明的一个实施例中,所述粘附承载层由负压软管、软体连接层、 上抗拉层、硅胶胶黏层、下抗拉层和仿生粘附表面组成,所述负压软管穿过所述软体驱动器 的外侧的通孔形成过盈配合,穿过所述软体连接层中间的通孔形成过盈配合,所述软体连 接层上表面通过硅胶胶黏剂或等离子体处理工艺与所述软体驱动器下表面形成紧密连接, 下表面通过硅胶胶黏剂或等离子体处理工艺与所述上抗拉层的上表面形成紧密连接,所述 上抗拉层的下表面通过所述硅胶胶黏层与所述下抗拉层的上表面形成紧密连接,所述硅胶 胶黏层为矩形环状结构,所述下抗拉层的上表面为粗糙表面,下表面通过硅胶胶黏剂或等 离子体处理工艺与所述仿生粘附表面紧密连接,所述仿生粘附表面下表面具有增强粘附和 摩擦作用的微纳结构。 本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变 得明显,或通过本发明的实践了解到。 附图说明 本发明上述的和/或附加的方面和优点从下面结合附图对实施例的描述中将变得 明显和容易理解,其中: 图1为根据本发明实施例的多功能自适应可控粘附软体机械手的外观结构示意 图; 图2为根据本发明实施例的多功能自适应可控粘附软体机械手的3/4剖视结构示 意图; 图3为根据本发明实施例的多功能自适应可控粘附软体机械手的爆炸图; 图4为根据本发明实施例的多功能自适应可控粘附软体机械手的正向弯曲抓取状 态结构示意图; 图5为根据本发明实施例的多功能自适应可控粘附软体机械手的反向弯曲释放状 态结构示意图。 4 CN 111546363 A 说 明 书 3/5 页 附图标记说明: 法兰盘底座1、法兰盘1A、承载轴1B、线绳脱附机构2、脱附舵机2A、舵盘2B、剥离线 绳2C、套管2D、末端承载杆2E、柔性弯曲驱动器3、软体驱动器3A、正压软管3B、和粘附承载层 4、负压软管4A、软体连接层4B、上抗拉层4C、硅胶胶黏层4D、下抗拉层4E和仿生粘附表面4F。











