
技术摘要:
本发明属于数据挖掘、智能驾驶领域,具体涉及一种面向智能驾驶的移动目标轨迹预测方法、系统、装置,旨在解决现有的移动目标轨迹预测方法预测精度较低的问题。本系统方法包括:获取输入视频中的图像帧;获取各图像帧中所有移动目标对应的检测区域,并分别计算第一影响 全部
背景技术:
移动目标轨迹预测是智能驾驶中的重要组成部分,对移动目标未来的轨迹进行预 测,可以保证智能驾驶系统能够提前做出正确的决策,降低交通中发生意外的可能性,提高 行驶过程的安全性和舒适性。 在智能驾驶系统中,基于循环神经网络的移动目标轨迹预测方法成为了主流。传 统的轨迹预测方法只能处理一些简单的交互场景,而行人和自行车人与车辆相比,受到交 通规则的约束和规范较弱,具有很强的主观性和随机性,在这种情况下,基于深度学习的移 动目标轨迹预测方法是智能驾驶中一种有效的方法。目前已有的基于循环神经网络的移动 目标轨迹预测方法过多的注重多个目标之间的空间关系,而忽略了目标在不同时间点上的 历史轨迹信息对未来轨迹的影响,尤其是在周围移动目标少的情况下,空间关系对未来轨 迹的影响大幅下降。因此有必要提出一种结合时间和空间信息的移动目标轨迹预测方法, 对目标未来的运动轨迹做出预测,便于智能驾驶系统做出正确的决策,预防交通事故发生。
技术实现要素:
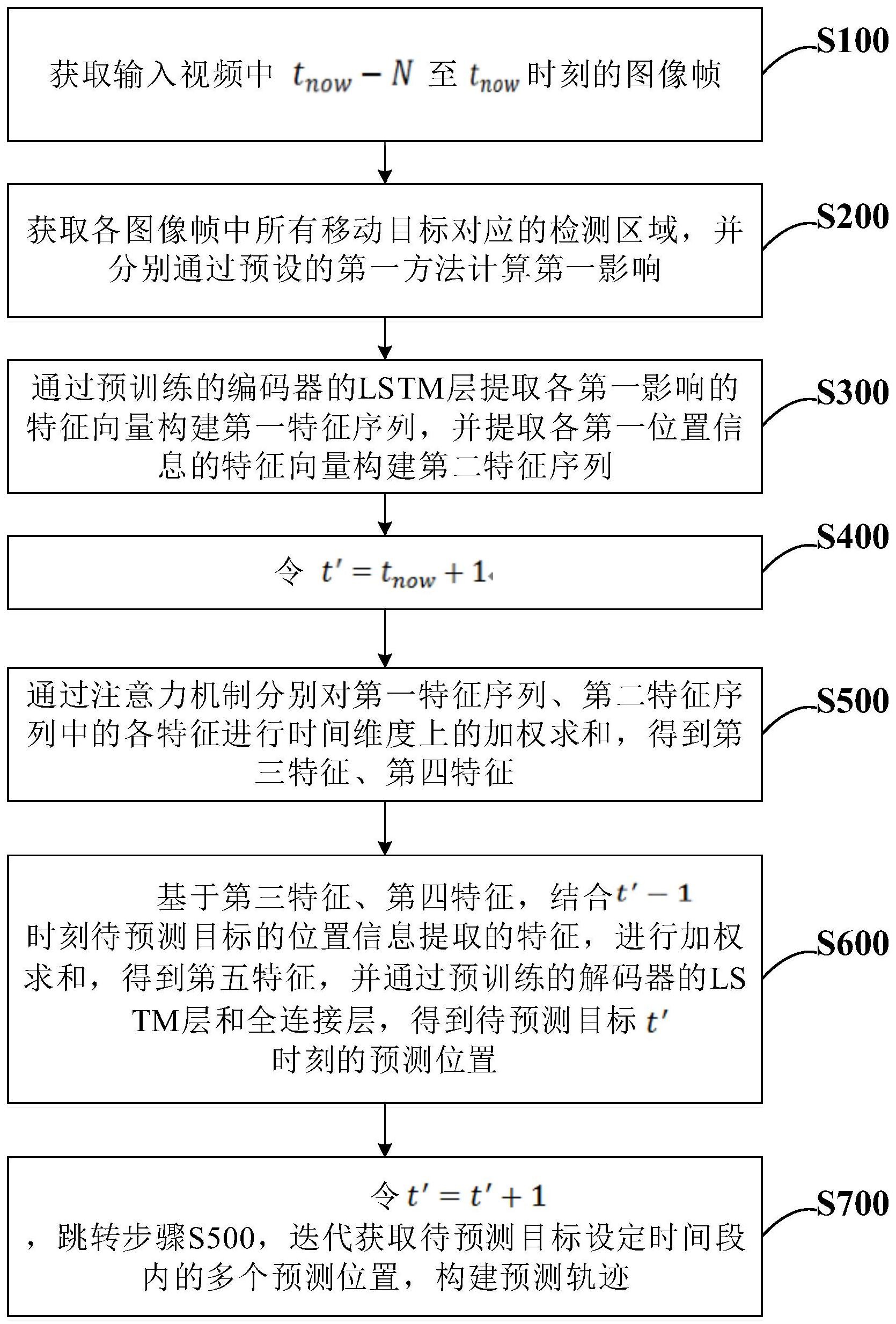
为了解决现有技术中的上述问题,即为了解决现有的基于循环神经网络的移动目 标轨迹预测方法过多的注重目标之间的空间关系,而忽略了目标在不同时间点的历史信息 对未来轨迹的影响,导致预测精度较低的问题,本发明第一方面,提出了一种面向智能驾驶 的移动目标轨迹预测方法,该方法包括: 步骤S100,获取输入视频中tnow-N至tnow时刻的图像帧;其中,N为正整数,tnow表示 当前时刻; 步骤S200,获取各图像帧中所有移动目标对应的检测区域,并分别通过预设的第 一方法计算第一影响;所述第一影响为各图像帧中所有移动目标对待预测目标影响程度的 加权和; 步骤S300,通过预训练的编码器的LSTM层提取各第一影响的特征向量构建第一特 征序列,并提取各第一位置信息的特征向量构建第二特征序列;所述第一位置信息为待预 测目标的位置信息; 步骤S400,令t'=tnow 1;t'表示待预测时刻; 步骤S500,通过注意力机制分别对所述第一特征序列、所述第二特征序列中的各 特征进行时间维度上的加权求和,得到第三特征、第四特征; 步骤S600,基于所述第三特征、所述第四特征,结合t'-1时刻所述待预测目标的位 置信息提取的特征,进行加权求和,得到第五特征,并通过预训练的解码器的LSTM层和全连 接层,得到所述待预测目标t'时刻的预测位置; 5 CN 111597961 A 说 明 书 2/11 页 步骤S700,令t'=t' 1,跳转步骤S500,迭代获取所述待预测目标设定时间段内的 多个预测位置,构建预测轨迹。 在一些优选的实施方式中,步骤S200中“获取各图像帧中所有移动目标对应的检 测区域”,其方法为: 提取各图像帧的多尺度特征,并分别通过RPN网络获取移动目标不同比例的候选 检测区域; 基于各候选检测区域,通过检测网络得到各图像帧中所有移动目标的检测区域; 所述检测网络基于卷积神经网络构建。 在一些优选的实施方式中,步骤S200中“通过预设的第一方法计算第一影响”,其 方法为: 其中, 为第一影响, 为移动目标对待预测目标的影响程度, 为t时刻第j个 移动目标的检测区域 经过编码器的嵌入层得到的向量, 为t时刻待预测目标的检 测区域、 通过多层感知机映射的向量,Wr为编码器嵌入层的权重,φ(·)表示嵌入函数,j 表示待预测目标周围移动目标的数量,<·,·>表示向量的内积操作,t表示时刻。 在一些优选的实施方式中,步骤S500中“通过注意力机制分别对所述第一特征序 列、所述第二特征序列中的各特征进行时间维度上的加权求和,得到第三特征、第四特征”, 其方法为: 基于所述第一特征序列、所述第二特征序列中的各特征,结合所述解码器待预测 时刻上一时刻LSTM的隐藏层状态,通过预设的第二方法计算各特征的注意力分数; 基于所述注意力分数,通过预设的第三方法获取各特征的权重; 基于所述权重,对所述第一特征序列、所述第二特征序列中的各特征进行加权求 和,得到第三特征、第四特征。 在一些优选的实施方式中,“通过预设的第二方法计算各特征的注意力分数”,其 方法为: score(s Tt′-1,hk)=v tanh(W1st′-1 W2hk) , 其中,score(st′-1,hk)为各特征的注意力分数,hk为特征序列中的第k个特征,st′-1 为待预测时刻上一时刻解码器LSTM的隐藏层状态,v、W1、W2为预设的权重,T表示转置。 在一些优选的实施方式中,“通过预设的第三方法获取各特征的权重”,其方法为: 6 CN 111597961 A 说 明 书 3/11 页 其中,βt′k表示各特征的权重, 表示取注意力分数的最大值。 在一些优选的实施方式中,步骤S600中“通过预训练的解码器的LSTM层和全连接 层,得到所述待预测目标t'时刻的预测位置”,其方法为: 基于所述第五特征,通过解码器的LSTM得到隐藏层状态; 基于所述隐藏层状态,通过解码器全连接层获取所述待预测目标在待预测时刻的 预测位置。 本发明的第二方面,提出了一种面向智能驾驶的移动目标轨迹预测系统,该系统 包括图像帧获取模块、第一影响计算模块、特征序列构建模块、预定义模块、加权求和模块、 位置预测模块、迭代模块; 所述图像帧获取模块,配置为获取输入视频中tnow-N至tnow时刻的图像帧;其中,N 为正整数,tnow表示当前时刻; 所述第一影响计算模块,配置为获取各图像帧中所有移动目标对应的检测区域, 并分别通过预设的第一方法计算第一影响;所述第一影响为各图像帧中所有移动目标对待 预测目标影响程度的加权和; 所述特征序列构建模块,配置为通过预训练的编码器的LSTM层提取各第一影响的 特征向量构建第一特征序列,并提取各第一位置信息的特征向量构建第二特征序列;所述 第一位置信息为待预测目标的位置信息; 所述预定义模块,配置为令t'=tnow 1;t'表示待预测时刻; 所述加权求和模块,配置为通过注意力机制分别对所述第一特征序列、所述第二 特征序列中的各特征进行时间维度上的加权求和,得到第三特征、第四特征; 所述位置预测模块,配置为基于所述第三特征、所述第四特征,结合t'-1时刻所述 待预测目标的位置信息提取的特征,进行加权求和,得到第五特征,并通过预训练的解码器 的LSTM层和全连接层,得到所述待预测目标t'时刻的预测位置; 所述迭代获取模块,配置为令t'=t' 1,跳转步骤S500,迭代获取所述待预测目标 设定时间段内的多个预测位置,构建预测轨迹。 本发明的第三方面,提出了一种存储装置,其中存储有多条程序,所述程序应用由 处理器加载并执行以实现上述的面向智能驾驶的移动目标轨迹预测方法。 本发明的第四方面,提出了一种处理装置,包括处理器、存储装置;处理器,适用于 执行各条程序;存储装置,适用于存储多条程序;所述程序适用于由处理器加载并执行以实 现上述的面向智能驾驶的移动目标轨迹预测方法。 本发明的有益效果: 本发明通过结合待预测目标历史轨迹的时间和空间信息,提高了轨迹预测的精 度。本发明利用Long-Short Term Memory(LSTM)作为基本框架,根据各图像帧获取移动目 标的检测区域,捕获待预测目标和周围移动目标的交互关系,在空间维度上进行加权求和, 构建第一特征序列。并基于待预测目标的位置信息捕获待预测目标的运动属性,构建第二 特征序列。 通过注意力机制分别对第一特征序列、第二特征序列中不同时刻的特征赋予不同 的权重,进行时间维度上加权求和,结合空间信息和时间信息,进行待预测目标的轨迹预 7 CN 111597961 A 说 明 书 4/11 页 测,提高了轨迹预测的精度。 附图说明 通过阅读参照以下附图所做的对非限制性实施例所做的详细描述,本申请的其他 特征、目的和优点将会变得更明显。 图1是本发明一种实施例的面向智能驾驶的移动目标轨迹预测方法的流程示意 图; 图2是本发明一种实施例的面向智能驾驶的移动目标轨迹预测系统的框架示意 图; 图3是本发明一种实施例的提取移动目标检测区域的流程示意图; 图4是本发明一种实施例的轨迹预测模型预测移动目标轨迹的详细流程示意图; 图5是本发明一种实施例的待预测目标预测轨迹与真实运动轨迹标签对比的效果 示意图; 图6是适于用来实现本发明实施例的电子设备的计算机系统的结构示意图。











