
技术摘要:
本发明涉及一种用于内级联结构组件隐裂缺陷的自动识别方法,包括:步骤1、通过隐裂检测设备获得内级联结构组件的隐裂图像;步骤2、基于隐裂图像,通过计算机图像处理方法自动识别隐裂图像上的缺陷点;步骤2.3、通过图像处理得到无边框内级联结构组件的边缘检测图像;步 全部
背景技术:
一些薄膜光伏电池的单片电池电压较小,所以这些电池采用内级联结构将单片电 池组串联成大面积组件,增大工作电压,降低工作电流和内部电阻损失。内级联结构通常指 在组件制备过程中,将采用溅镀或共蒸法形成的单层或多层薄膜物质通过激光或机械切割 完成组件内部电池串联的结构。常见采用内级联结构光伏组件有CdTe、CIGS、钙钛矿等。 太阳能电池隐裂是光伏组件电池片或者电池片上导线断裂导致电池片电流出发 收集输送到组件输出主栅线或无法输出到输出电缆的情况。组件隐裂检测的方法包括主要 EL(Electroluminescence,电致发光)与PL(Photoluminescence,光致发光)等。EL是简单有 效的检测隐裂的方法,电池片的核心部分半导体PN结,在没有其它激励(例如光照、电压、温 度)的条件下,其内部处于一个动态平衡状态,电子和空穴的数量相对保持稳定。当被施加 正向偏压之后,晶体硅电池就会发光,波长1100nm左右,属于红外波段,肉眼观测不到,可利 用CCD相机辅助捕捉这些光子,然后通过计算机处理后以图像的形式显示出来。给晶硅组件 施加电压后,所激发出的电子和空穴复合的数量越多,其发射出的光子也就越多,所测得的 EL图像也就越亮;如果有的区域EL图像比较暗,说明该处产生的电子和空穴数量较少,代表 该处存在缺陷。 光致发光(Photoluminescence,简称PL)是指物质吸收光子(或电磁波)后重新辐 射出光子(或电磁波)的过程。从量子力学理论上,这一过程可以描述为物质吸收光子跃迁 到较高能级的激发态后返回低能态,同时放出光子的过程。光致发光是一种探测材料电子 结构的方法,它与材料无接触且不损坏材料。光致发光的光谱结构和光强是测量许多重要 材料的直接手段。PL检测图像中颜色较暗处代表存在缺陷。 内级联结构光伏组件和晶硅光伏组件的生产工艺存在较大区别,其隐裂检测图像 的测试条件和缺陷识别技术也存在不同。因此有必要针对性地对内级联结构光伏组件提出 检测和缺陷识别方法,实现内级联结构光伏组件的隐裂检测和缺陷自动识别,有利于节省 人工,达成较为一致的隐裂判定结果,促进不同品牌型号内级联结构组件的横向对标。
技术实现要素:
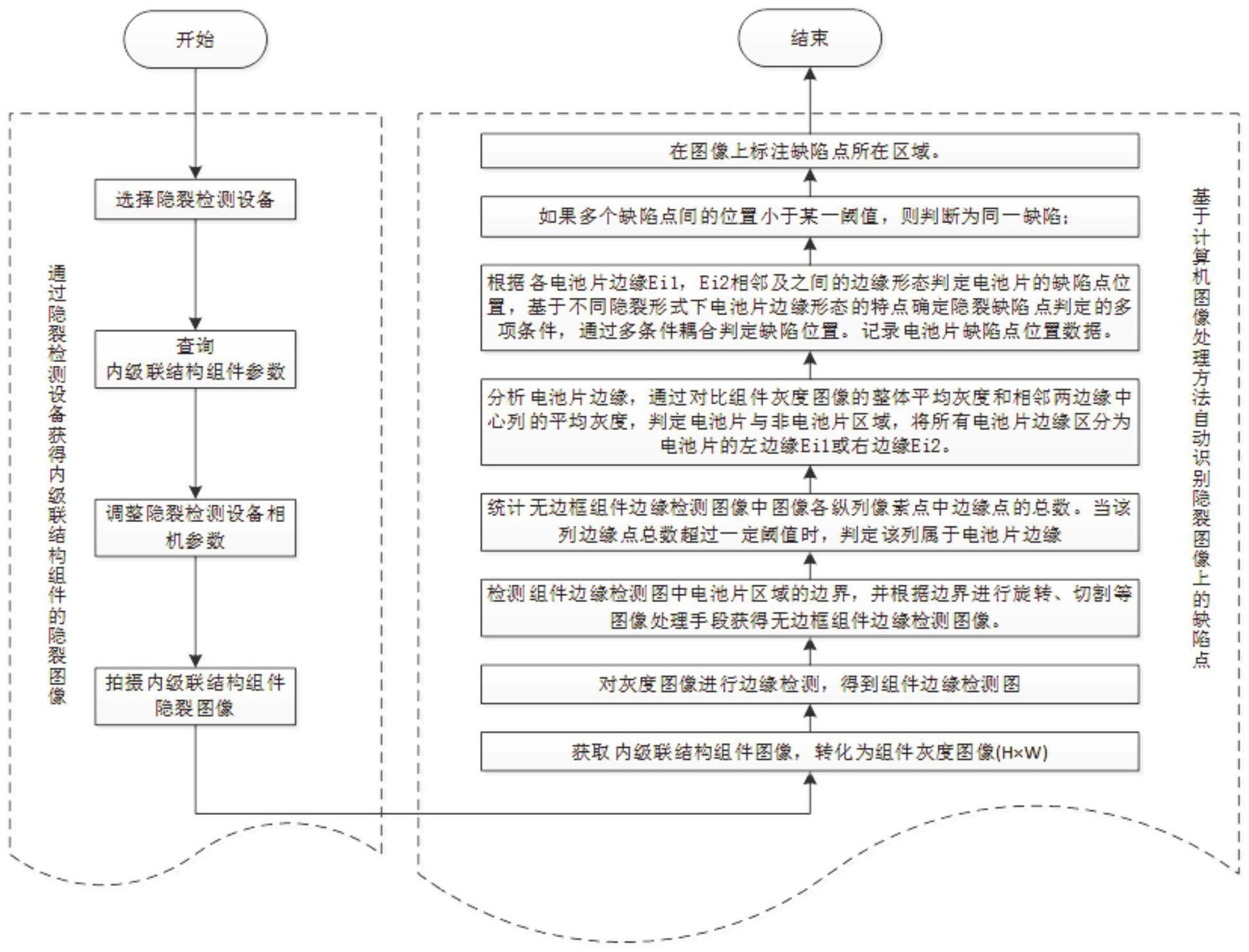
本发明的目的是克服现有技术中的不足,提供一种用于内级联结构组件隐裂缺陷 的自动识别方法。 这种用于内级联结构组件隐裂缺陷的自动识别方法,包括以下步骤: 步骤1、通过隐裂检测设备获得内级联结构组件的隐裂图像; 步骤1.1、选择隐裂检测设备; 步骤1.2、根据内级联结构组件参数调整隐裂检测设备相机参数,拍摄内级联结构 4 CN 111583190 A 说 明 书 2/4 页 组件的隐裂图像; 步骤2、基于隐裂图像,通过计算机图像处理方法自动识别隐裂图像上的缺陷点; 步骤2.1、将内级联结构组件的隐裂图像转化为灰度图像; 步骤2.2、对灰度图像进行边缘检测,获得内级联结构组件的边缘检测图像; 步骤2.3、通过图像处理得到无边框内级联结构组件的边缘检测图像:检测内级联 结构组件边缘检测图中有效检测区域的边界,并根据有效检测区域的边界进行旋转和切 割,获得无边框内级联结构组件边缘检测图像; 步骤2.4、基于无边框内级联结构组件的边缘检测图像,确定各有效检测区域边缘 所在位置: 步骤2.4.1、统计无边框内级联结构组件的边缘检测图像的各纵列像素点中边缘 点的总数:当该列边缘点总数超过一定阈值时,判定该列属于有效检测区域边缘;当该列边 缘点总数未超过所述阈值时,判定该列属于非有效检测区域,不作边缘判定; 步骤2.4.2、分析有效检测区域边缘:通过对比内级联结构组件灰度图像的整体平 均灰度和相邻两边缘中心列的平均灰度,判定内级联结构组件的有效检测区域与非有效检 测区域;将所有有效检测区域边缘区分为有效检测区域的左边缘Ei1或右边缘Ei2; 步骤2.5、根据各有效检测区域左边缘Ei1和右边缘Ei2之间或相邻不同隐裂形式下 的边缘形态,确定隐裂缺陷点判定的多项限制条件,通过多项限制条件耦合判定缺陷位置, 记录缺陷点位置数据; 步骤2.6、筛除重复缺陷点并标注:将相距位置小于一定阈值的缺陷点合并为同一 处隐裂缺陷,归并标记在同一个边长为所述阈值的缺陷框中;在图像上标注出缺陷点所在 缺陷框。 作为优选,步骤1.1所述隐裂检测设备包括基于电致发光的隐裂检测设备或基于 光致发光的隐裂检测设备。 作为优选,步骤1.2所述内级联结构组件参数包括短路电流和开路电压;所述隐裂 检测设备相机参数包括快门速度、感光度和光圈大小。 作为优选,步骤2 .2所述对灰度图像进行边缘检测的方式包括运用Prewitt、 Sobel、Canny或Laplacian检测算法来判定内级联结构组件中有效检测区域的边缘。 作为优选,在灰度图像中,步骤2.4所述有效检测区域为发光区域,非有效检测区 域为非发光区域。 作为优选,所述步骤2.4.1采用结合邻列边缘点总和数的方式统计无边框内级联 结构组件的边缘检测图像的各纵列像素点中边缘点的总数。 作为优选,步骤2.5所述不同隐裂形式下有效检测区域边缘形态的特点包括隐裂 处边缘像素点的分布和边缘形态的变化率。 本发明的有益效果是:本发明实现了内级联结构光伏组件隐裂缺陷的自动识别, 有利于节省人工,达成较为一致的隐裂判定结果,促进不同品牌型号内级联结构组件性能 的横向对标。 附图说明 图1为用于内级联结构组件隐裂缺陷的自动识别方法的流程图; 5 CN 111583190 A 说 明 书 3/4 页 图2为碲化镉组件电致发光图; 图3为裁切后的边缘检测图像; 图4为裁切后的灰度图像; 图5为标记缺陷点的裁切后的灰度图像; 图6为标记缺陷框的裁切后灰度图像。











