
技术摘要:
本发明是一种草食动物日粮搅拌饲喂机器人,包括底盘、搅拌料仓、搅拌机构、行走机构、传动系统、控制系统和电池组动力系统,行走机构安装在底盘的底部,搅拌料仓设置在底盘上,在底盘的前端上还设有机器人外壳,在搅拌料仓侧面靠底部位置开设有卸料口,在卸料口上盖设 全部
背景技术:
现在的饲喂基本都是用人工方式,或者采用拖拉机或者农用三轮加装饲料搅拌车 而成,没有专业的自动饲喂设备,要保证动物营养需要,人工方式的成本高,能耗高且不稳 定。同时,由于混合日粮的搅拌车体积大,使用中需要配套大型动力拖拉机和标准的圈舍、 饲槽设施,而在我国现行的饲养调节下,圈舍的空间窄,饲槽设施不完备,因此存在着全混 合日粮技术应用的适应性问题。
技术实现要素:
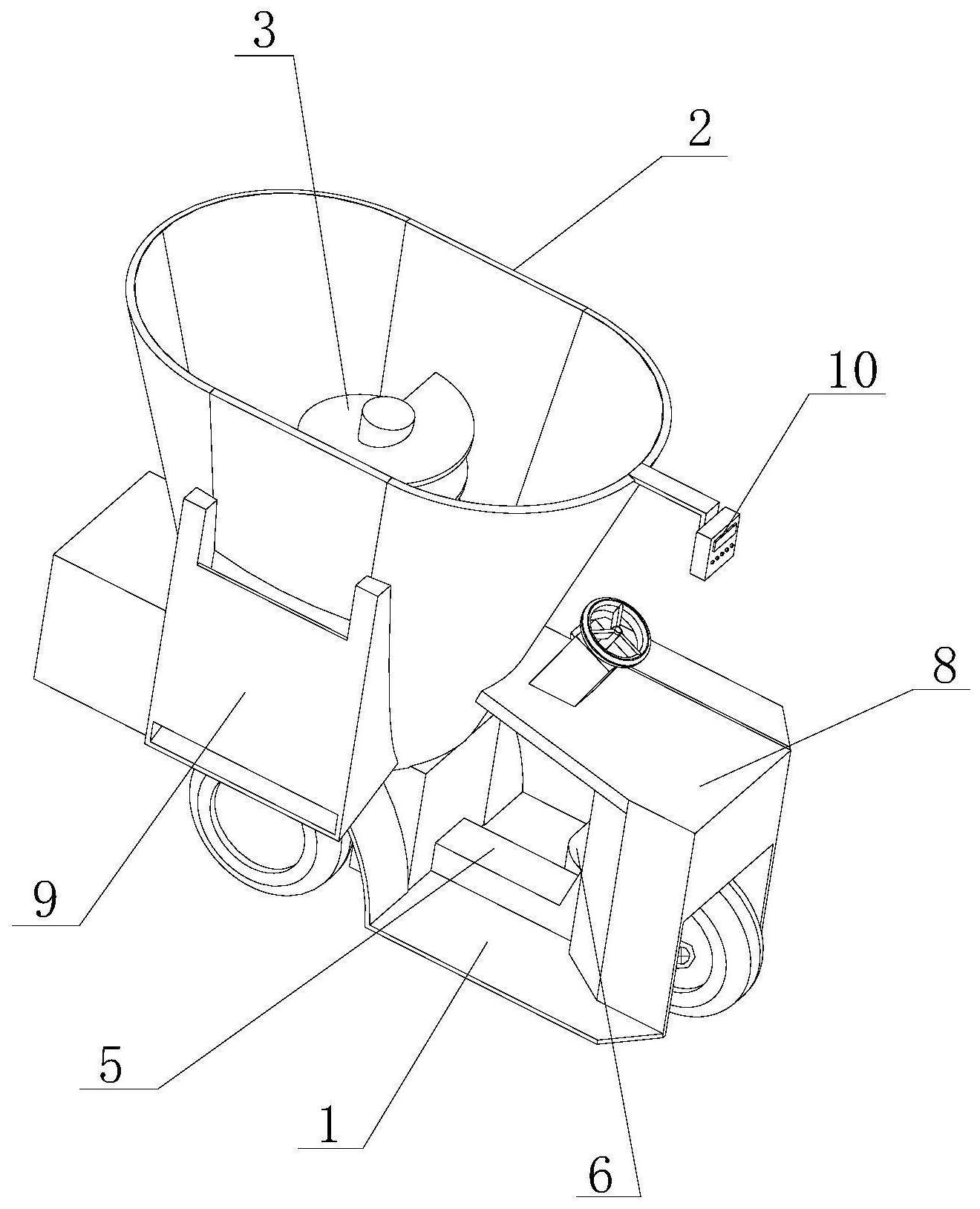
本发明为解决上述技术问题,提供了一种能够自动充电、自动规划路径,能够准确 完成饲喂任务的草食动物日粮搅拌饲喂机器人。 技术方案如下,一种草食动物日粮搅拌饲喂机器人,其特征在于,包括底盘、搅拌 料仓、搅拌机构、行走机构、传动系统、控制系统和电池组动力系统,所述行走机构安装在所 述底盘的底部,所述搅拌料仓设置在所述底盘上,在所述底盘的前端上还设有机器人外壳, 在所述搅拌料仓侧面靠底部位置开设有卸料口,在卸料口上盖设有卸料装置,所述搅拌机 构安装在搅拌料仓内的底部中心处,所述传动系统为搅拌机构、行走机构及控制卸料装置 开合提供动力,所述控制系统具有导航模块及识别模块,通过激光和磁钉的地面铺设,确立 路径以及对圈舍的识别,在圈舍中的卸料区和饲草间内装料区通过磁钉确认位置执行相应 的操作,所述传动系统和所述控制系统也均设置在所述底盘上,并且通过导线与所述电池 组动力系统连接,所述电池组动力系统设置在所述底盘的尾部,所述电池组动力系统与设 置在圈舍处的充电乌站配合进行自动充电。 作为进一步的改进,还包括安全防护系统,所述安全防护系统与所述电池组动力 系统、所述控制系统通过导线连接。 作为进一步的改进,所述安全防护系统包括测距传感器、安全防撞开关、限位开关 和两个紧急停止开关,所述测距传感器安装在所述机器人外壳的前端,用于避免由于外来 的物体进入工作区域,行进方向检测到障碍物后,机器人停止,直到障碍物撤离后安全装置 复位,机器人自动恢复工作;所述安全防撞开关设置在所述机器人外壳的外沿上,碰撞或者 挤压都会使得机器人在工作的过程中停止下来,如果在设定的时间内,没有移开障碍物,机 器人停止工作,直到有人工干预后重新工作;所述限位开关安装在机器人外壳的侧面上,在 侧方遇到外力变形后,限位开关动作会让机器人停止工作,避免外部突然冲击导致机器受 损;所述两个紧急停止开关分别设置在所述机器人外壳的前侧面和后侧面上,确保不需要 机器人工作时紧急停止使用。 作为进一步的改进,还包括称重系统,所述是由四个重量传感器和称重仪表组成, 四个重量传感器均安装在所述底盘上,称重仪表安装在所述搅拌料仓上,所述四个重量传 3 CN 111567425 A 说 明 书 2/5 页 感器与称重仪表通过导线连接,实时检测搅拌料仓的重量变化给到称重仪表,称重仪表记 录整个饲料搅拌的过程:配方种类、上料顺序、上料重量、混合时间、卸料重量。 作为进一步的改进,所述卸料装置包括铰接在所述搅拌料仓上的卸料门,及控制 卸料门开合的液压机构。 作为进一步的改进,所述行走机构由三个驱动电机、编码器、制动器、减速机和三 个轮毂组成,在所述底盘的前端底部还设有控制方向的舵轮机构。 作为进一步的改进,所述搅拌机构由绞龙和刀片组件组成,所述绞龙通过液压马 达驱动,所述刀片组件安装在所述绞龙上。 作为进一步的改进,所述搅拌料仓为锥形搅拌料仓。 有益效果 有益效果为:24小时可以饲喂,避免夜间人工饲喂带来的不安全因素。精细化管 理,保证日粮一致性,减少由于饲喂偏差给动物造成应激反应。精准饲喂,精准执行饲喂配 方,提高饲料的转化率,增加动物健康。电动替代原来的燃油发动机带来的噪音,改善了牧 场环境,提高动物营养健康。 附图说明 下面结合附图与实施案例进一步说明本发明。 图1为本发明的整体结构示意图一 图2为发明的整体结构示意图二; 图3为牛场布局及机器人路径图; 图4为牛群在牛舍中的位置图。 图中编号: 1、底盘 2、搅拌料仓 3、搅拌机构 4、行走机构 5、传动系统 6、控制系统 7、电池组动力系统 8、机器人外壳 9、卸料装置 10、称重仪表











