
技术摘要:
一种正畸弓丝弯制顺序规划等角度划分角度确定方法,它涉及正畸弓丝弯制技术领域,在应用等角度划分为正畸弓丝规划弯制顺序时,基于正畸弓丝曲线成形控制点信息集,成形控制点的机器人运动信息集,结合机器人弯制正畸弓丝的特点设定等角度域弯制点密度上限值和等角度域 全部
背景技术:
错颌畸形是危及人体健康的第三大口腔疾病,呈现较高的发病率,现代口腔医学 中,固定矫治是一种 常用且有效的正畸治疗手段,而正畸弓丝的弯制是固定矫治技术的关 键,近年来,深受数字化制造技术的 影响,传统的口腔制造加工工艺正发生革命性变化,口 腔正畸领域也受益于数字化技术,正畸矫治器中弓 丝的加工正在向数字化发展。 正畸弓丝弯制顺序规划是正畸弓丝实现数字化弯制的必要前提,合理的弯制顺序 规划不仅可以提高机 器人弯制正畸弓丝的效率而且还可以大大提高正畸弓丝的弯制精 度,达到预期的矫正效果,等角度划分是 一种弯制技术领域经常使用的弯制顺序规划方 法,它将正畸弓丝曲线划分成角度相等的一系列等角度均分 域,因此在等角度划分时,划 分角度的确定就成为等角度划分的关键步骤,但目前正畸弓丝弯制技术领域 缺少等角度 划分时角度的合理确定方法,角度的确定一般是按照约定俗成按照以往的经验提前设定, 而且 一经设定,在划分进行过程中就不能更改,不能根据等角度域内弯制点的分布情况及 弯制难度改变角度大 小,难以实现正畸弓丝数字化精准弯制。 对于正畸弓丝弯制规划的划分方法的研究,在本发明人已经授权的授权公告号为 CN107714203B的发 明专利《一种等角度划分的正畸弓丝弯制顺序规划方法》中提出了一种 等角度划分方法,在正畸弓丝曲线 上进行区域划分,虽然这种方法对正畸弓丝弯制规划具 有一定应用价值,但由于该方法仅以一种无依据的 均匀化标准对正畸弓丝曲线进行划分, 而且在划分等角度域的过程中划分角度的确定都是划分前设定好的, 所划分的等角度域 区间内通常会存在弯制点密集程度过大或在同一等角度域内各弯制点弯制难度较大的 情 况,即在对正畸弓丝进行等角度划分的过程中未充分考虑到正畸弓丝曲线上各弯制点信息 的个性化特点, 无法高效对正畸弓丝实现弯制顺序规划,不利于最大化发挥弯制机器人的 优势。
技术实现要素:
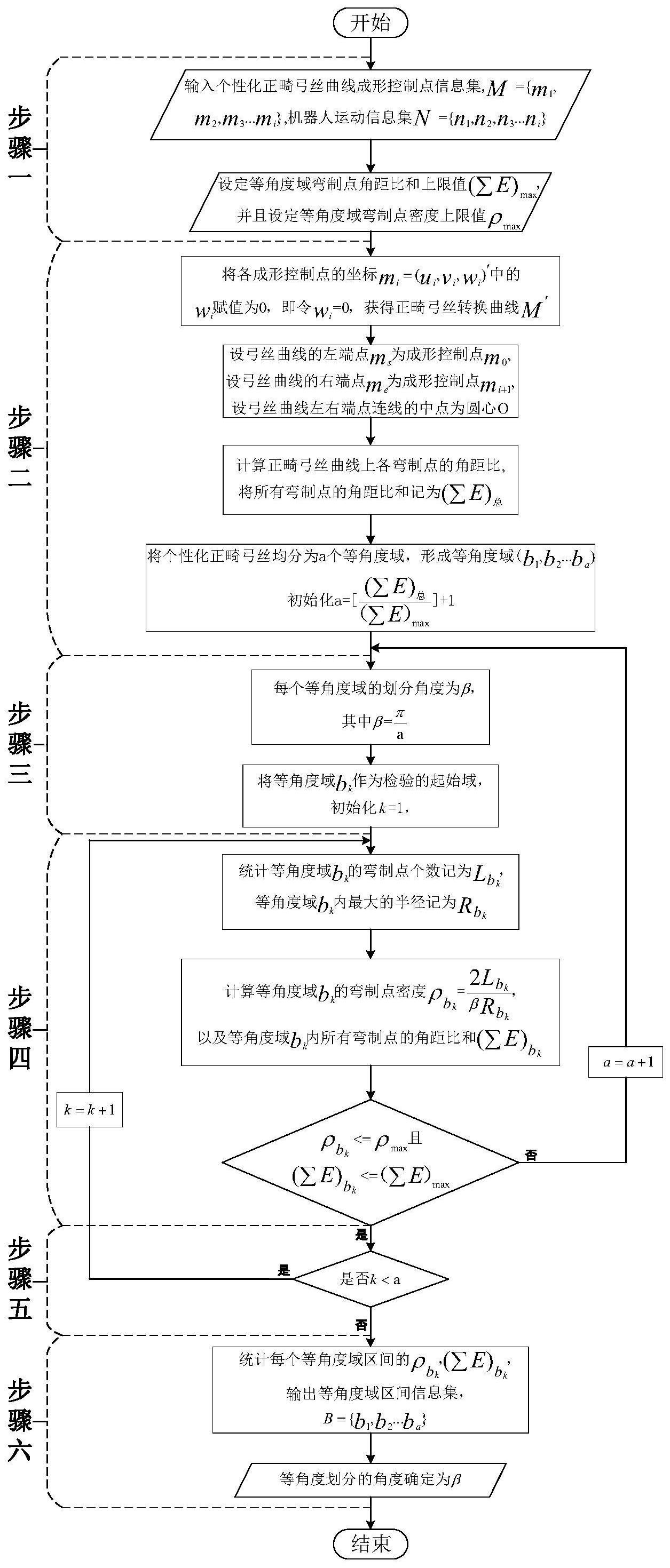
针对上述问题,本发明提出一种正畸弓丝弯制顺序规划等角度划分角度确定方 法,解决目前在对正畸 弓丝进行等角度划分时,缺少对划分角度进行确定的问题,有利于 弯制顺序的合理规划,避免机器人弯制 过程中出现干涉的情况,进而实现正畸弓丝高效的 数字化弯制。 一种正畸弓丝弯制顺序规划等角度划分角度确定方法,所述方法的具体实现过程 为: 步骤一、等角度划分数据导入: 根据患者有i个成形控制点的个性化正畸弓丝曲线,输入个性化正畸弓丝曲线成 4 CN 111588500 A 说 明 书 2/6 页 形控制点信息集 M={m1,m2,m3,...,mi},mi=(ui,vi,wi) '为每个个性化正畸弓丝曲线成形 控制点的坐标,每一个正畸 弓丝曲线成形控制点mi均对应一个成形控制点机器人运动信 息单元ni,所以输入的成形控制点的机器人运 动信息集为N={n1,n2,n3,...,ni},ni表示机 器人在弯制该点时的成形控制点坐标及弯制角度, ni=(ui,vi,wi,αi) ',ui、vi、wi为该成形 控制点mi的坐标,αi为机器人作用在成形控制点mi上的弯制角 度,将正畸弓丝曲线成形控 制点信息集M、成形控制点的机器人运动信息集N输入到正畸弓丝弯制系统 中;并且根据机 器人弯制正畸弓丝的特点设定等角度域弯制点密度上限值ρmax,等角度域弯制点角距比和 上限值(∑E)max; 步骤二、正畸弓丝曲线坐标转换及等角度划分份数a初值设定: 将个性化正畸弓丝成形控制点信息集中各成形控制点的坐标mi=(ui ,vi ,wi) '中 的wi赋值为0,即令 wi=0,获得正畸弓丝转换曲线M′; 个性化正畸弓丝曲线两端点坐标为ms(us,vs,ws),me(ue,ve,we),将正畸弓丝曲线左 端点ms设定为 成形控制点m0,将弓丝曲线右端点me设定为成形控制点mi 1,以正畸弓丝曲线 左右端点的中点mo 为圆心O; 针对等角度划分而言,定义正畸弓丝曲线上任意一弯制点mj的角距比 为弯制点 mj的弯制角度αj与其弯制距离 的比值,即 其中 表示弯制点mj与弯 制点mj 1之间的弧长,计 算个性化正畸弓丝曲线上各弯制点的角距比 并且将所有弯制 点的角距比求和,记为(∑E)总; 将正畸弓丝曲线以O为圆心,均分为a个角度相等的等角度域,即形成等角度域 (b1,b2,...,ba),规 定等角度划分的初始份数a等于所有弯制点角距比的和与设定的等角 度域角距比和上限值的比值取整之后 再加一,即初始化a=[(∑E)总/(∑E)max] 1; 步骤三、计算等角度划分的角度β: 等角度划分形成的等角度域(b1,b2,...,ba)所对应的角度β都相等,且等角度划分 的角度β等于弓丝 曲线总角度π与等角度划分份数a的比值,即 将等角度域bk作为检验是否增加等角度划分份数a的起始域,初始化k=1; 步骤四、判断是否增加等角度划分份数a: 5 CN 111588500 A 说 明 书 3/6 页 统计等角度域bk的弯制点个数 在这里规定 为属于等角度域bk的所有弯制点 的个数,即等角度 域bk左右边界内部的所有弯制点个数,特别地,如果弯制点位于等角度 域bk的左边界线上,则该弯制点属 于上一个等角度域bk-1,如果弯制点位于等角度域bk的右 边界线上,则该弯制点属于当前等角度域bk,并 且寻找等角度域bk内最大的半径 定义 为等角度域bk内正畸弓丝曲线上与圆心O距离最远的点与圆 心O的连线; 针对等角度划分而言,定义等角度域bk的弯制点密度 为等角度域bk内弯制点个 数 与等角度域bk的面积的比值,即 并且计算等角度域bk内所有弯制点的角 距比和记为 判断 且 是否成立; 如果 且 成立,则说明等角度域bk符合等角度划分要求,跳转 至步骤五; 如果 或 不成立,则说明等角度域bk不符合等角度划分要求, 等角度域bk的 弯制点分布比较集中或者等角度域bk内的弯制点弯制难度比较大,当前等角 度划分份数不能符合划分要求, 应该增加划分的份数,故令a=a 1,跳转至步骤三; 步骤五、判断是否继续检验等角度域: 判断k<a是否成立; 如果k<a成立,说明还没有检验完a个等角度域,应该继续检查下一个等角度域, 故,令k=k 1, 跳转至步骤四; 如果k<a不成立,则说明已经检验完a个等角度域,跳转至步骤六; 步骤六、确定等角度域区间及输出等角度划分角度β: 将等角度域(b1,b2,...,ba)确定为角度相等的等角度域区间{b1,b2,...,ba},统计 各等角度域区间的弯 制点密度 及弯制点角距比和 输出等角度域区间信息集B= {b1,b2,...,ba}; 等角度划分正畸弓丝曲线时划分角度确定为β,输出此时的划分角度β,程序结束。 本发明的有益效果为: 1、本发明在确定等角度划分的角度β时,综合考虑每个等角度域bk内的弯制点密 度 情况和弯制 点角距比和 情况,并且根据机器人弯制正畸弓丝的特点设定了弯 制点密度上限制ρmax和弯制点角 距比和上限值(∑E)max,从而限定了每个等角度度域bk内 的弯制点密集程度以及弯制点弯制难度,保证了 划分角度β确定的合理性,在使用等角度 划分为正畸弓丝弯制顺序规划时,增强了等角度划分的适用性。 2、本发明在对划分份数a进行初值设定时,考虑正畸弓丝曲线上所有弯制点的角 距比和(∑E)总以及 等角度域弯制点角距比和上限值(∑E)max,并且以他们的比值取整之后 再加一作为划分份数a的初值,不 仅使各等角度域满足等角度域弯制点角距比和上限值 (∑E)max的要求,而且这种初始份数的设定减少了不 必要的循环,降低了计算规模,提高了 等角度划分的效率。 6 CN 111588500 A 说 明 书 4/6 页 3、本发明在计算等角度域弯制点密度 时,采用等角度域内弯制点个数 与等角 度域面积的比值 作为该等角度域的弯制点密度 并且在计算等角度域面积时,由于正 畸弓丝形成牙弓曲线的并不是标 准的半圆形,所以在计算等角度域面积时,并没有采用简 单的半圆面积除以划分份数的方法,而是寻找等 角度域bk内最大的半径 代入公式进行 计算,确保计算等角度域面积时的准确性,进一步保证了划分的 准确性。 4、本发明在计算属于等角度域bk内的弯制点个数 时,不排除弯制点mi位于等角 度域边界线上的 情况,所以对特殊情况下弯制点的归属问题作以说明,避免了程序在执行 过程中,在对弯制点个数进行计 算时出现歧义的情况,提高了本算法的可操作性。 5、同本发明人已经授权的授权公告号为CN107714203B的发明专利《一种等角度划 分的正畸弓丝弯 制顺序规划方法》相比,本方法提出在等角度划分的过程中考虑等角度弯 制点密度和等角度域弯制点角距 比和这两个限定参数,使得划分过程并非以一种无依据 的均匀化标准进行划分,而是为符合限定参数的要 求而适应不断改变划分等角度域的角 度值,生成了一系列符合机器人弯制要求的等角度域,提高了正畸弓 丝成形控制点弯制顺 序规划方法的合理性,有效避免了弯制机器人产生空程无效动作、弯制过程相互干涉 动作 和弯制运动复杂动作,充分发挥弯制机器人优势的最大化,明显提高了弯制效率。 附图说明 为了易于说明,本发明由下述的具体实施及附图作以详细描述。 图1为一种正畸弓丝弯制顺序规划等角度划分角度确定方法流程图; 图2为个性化正畸弓丝弯制点分布示意图; 图3为等角度初始划分正畸弓丝曲线及等角度域弯制点密度计算示意图;











