
技术摘要:
本发明提供一种适当地兼顾自动驾驶和介入于该自动驾驶的司机所进行的手动驾驶的车辆控制装置。本发明是实施本车辆的驾驶辅助或自动驾驶的车辆控制装置,具有基于周边的监视结果来设定成为行驶中的车道内的行驶路径的目标位置,基于目标位置来进行转向控制的转向装置。 全部
背景技术:
在以四轮车为首的车辆的自动驾驶或驾驶辅助中,通过传感器对车辆的特定方向 或全部方向进行监视,并且对司机的状态、车辆的行驶状态进行监视,根据上述的监视结果 而对适当的路径、适当的速度下的车辆的自动驾驶进行控制、或者对驾驶员所进行的驾驶 进行辅助。即使是具有这样的自动驾驶功能的车辆,司机也会有主动参与驾驶的要求,并且 有可能会产生这样的状况、事态。在这样的情况下,即使是在自动驾驶的过程中司机也能够 以手动介入驾驶。作为用于兼顾这样的自动驾驶和司机所进行的手动驾驶的技术而提出了 专利文献1等。在专利文献1中,基于方向盘的操作量将车辆的自动驾驶控制状态从自动驾 驶切换为手动驾驶,并且根据司机的方向盘把持状态来设定与自动驾驶控制状态相应的针 对转向的转向反力。 现有技术文献 专利文献 专利文献1:日本特开2017-218020号公报
技术实现要素:
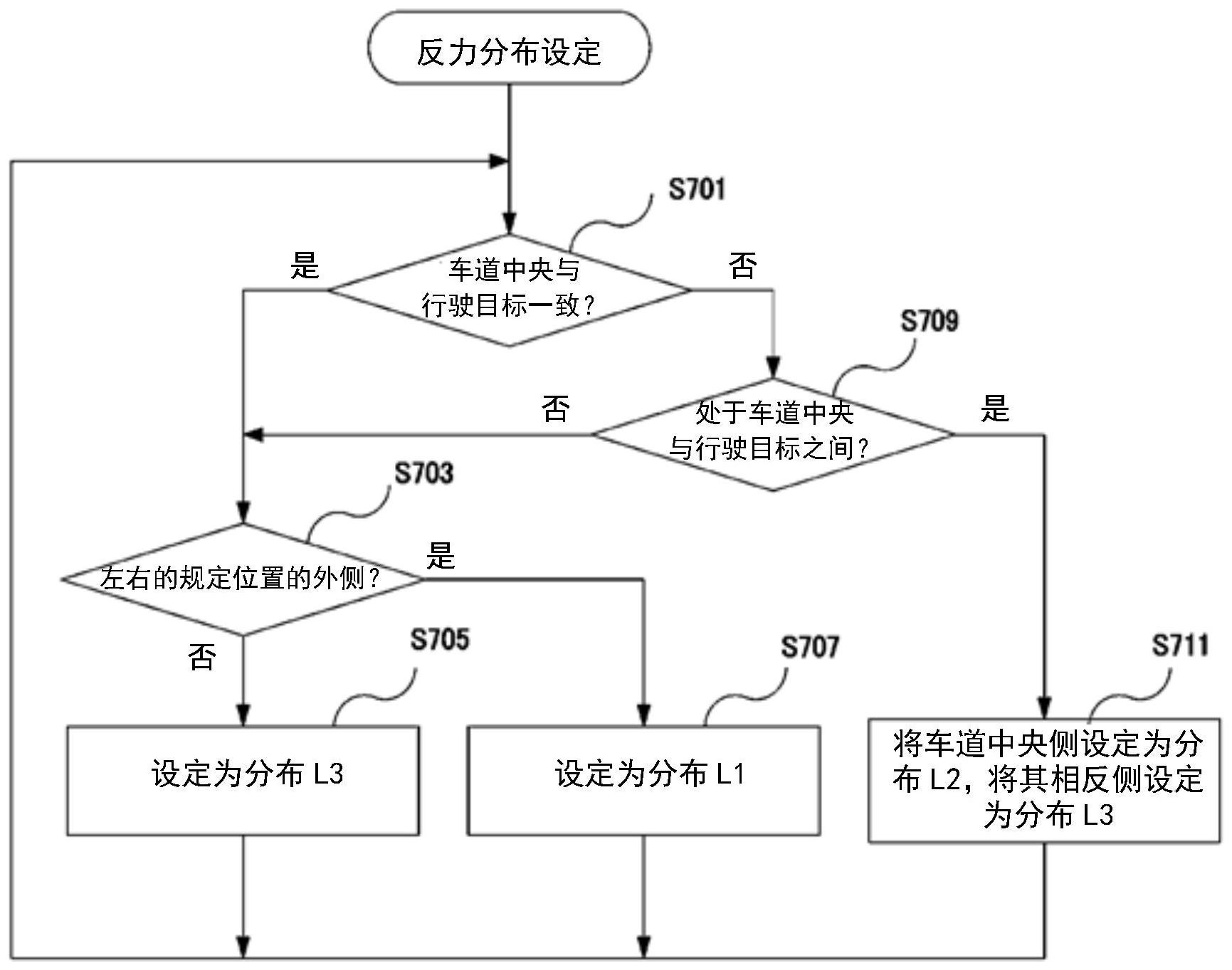
发明所要解决的问题 在自动驾驶中,以决定车辆所行驶的目标轨迹并使车辆沿着该目标轨迹行驶的方 式进行控制。该行驶目标轨迹通常大多沿着车道的中央,但有时也会选择偏离车道中央的 轨迹。例如在路肩存在障碍物的情况下、超越在相邻车道上行驶的车辆的情况下、沿着弯道 进行转弯的情况下等。这样的偏离车道中央的所谓的偏移行驶,不仅是为了回避障碍物,有 时在即使在车道中央行驶也没有问题的情况下也会进行这样的偏移行驶。其目的在于,例 如,为了缓和驾驶员、同乘者等因接近障碍物、车辆而产生的紧张感、不安感,或者为了提高 弯道行驶时的舒适性等。这样的情况下的偏移行驶并不一定是必需的,也存在喜欢在车道 中央行驶的驾驶员。 但是,在自动驾驶中的车辆中,并不希望驾驶员进行从自动选择的行驶轨迹偏离 这样的操作,有时也会进行阻碍其操作的控制。因此,对于可以被容许的驾驶员的操作,阻 碍其从自动驾驶偏离的功能也会起作用。 本发明是鉴于上述现有例而完成的,其目的在于提供一种适当地兼顾自动驾驶和 介入于该自动驾驶的驾驶员所进行的手动驾驶的车辆控制装置。 用于解决问题的手段 为了实现上述目的,本发明具有以下构成。 即,根据本发明的一个方面,提供一种车辆控制装置,是实施本车辆的驾驶辅助或 自动驾驶的车辆控制装置,其特征在于, 3 CN 111547130 A 说 明 书 2/15 页 所述车辆控制装置具有: 设定机构,其基于周边的监视结果来设定成为行驶中的车道内的行驶路径的目标 位置;以及 转向控制机构,其基于所述目标位置来进行转向控制, 所述转向控制机构即使在基于所述目标位置而进行转向控制的情况下,也能够接 受驾驶员所进行的手动操作产生的转向输入, 在接受到所述转向输入时,所述转向控制机构针对所述手动操作而产生规定的反 力, 所述转向控制机构对转向反力特性进行如下控制:在所述目标位置相对于所述车 道的宽度方向而从成为本车辆所行驶的车道的中央附近的第一基准位置离开的情况下,在 接受到所述转向输入时,针对某个舵角的手动操作,使得针对朝向从所述目标位置指向所 述第一基准位置的第一方向的手动操作而施加的所述转向反力小于针对朝向与所述第一 方向不同的第二方向的手动操作而施加的所述转向反力。 发明效果 根据本发明,能够适当地兼顾自动驾驶和介入于该自动驾驶的司机所进行的手动 驾驶。 附图说明 图1是表示实施方式的自动驾驶车辆的车辆系统的构成的图。 图2是车辆控制系统(控制单元)的功能块图。 图3是转向装置的框图。 图4是表示第一实施方式所涉及的自动驾驶状态的跳转的状态跳转图。 图5是表示车道宽度方向上的各个行驶位置的反力特性的切换的概要图。 图6是表示方向盘的反力特性的分布(profile)的图。 图7是表示切换反力特性的分布的步骤的一个例子的流程图的图。 图8是表示切换反力特性的分布的步骤的另一个例子的流程图的图。 附图标记说明 2:控制单元;31:转向盘;21:转向ECU;210M:转向反力设定部;210E:反力马达。











