
技术摘要:
本发明公开了一种主动触发式多模态风险自助矫正和差异化干预方法,通过分析高风险交通行为与典型路段特征、气候特征、时间规律的耦合机理,清晰不同车型车辆运动学特性及事故类型特征,基于人因工程理论分析典型路段的高风险行为致因,并归纳不同风险等级下对应的交通 全部
背景技术:
随着汽车保有量的不断增加,道路交通环境越发复杂,特别是大桥、长隧道、长下 坡、急陡弯等风险路段,事故率很高,再遇到雨雪雾等恶劣天气,更是增加了事故发生的可 能性。 现阶段,各种先进的技术已用于交通事故的预防与防控,但是干预与防控手段还 是比较单一、被动,设备设施不够完善。
技术实现要素:
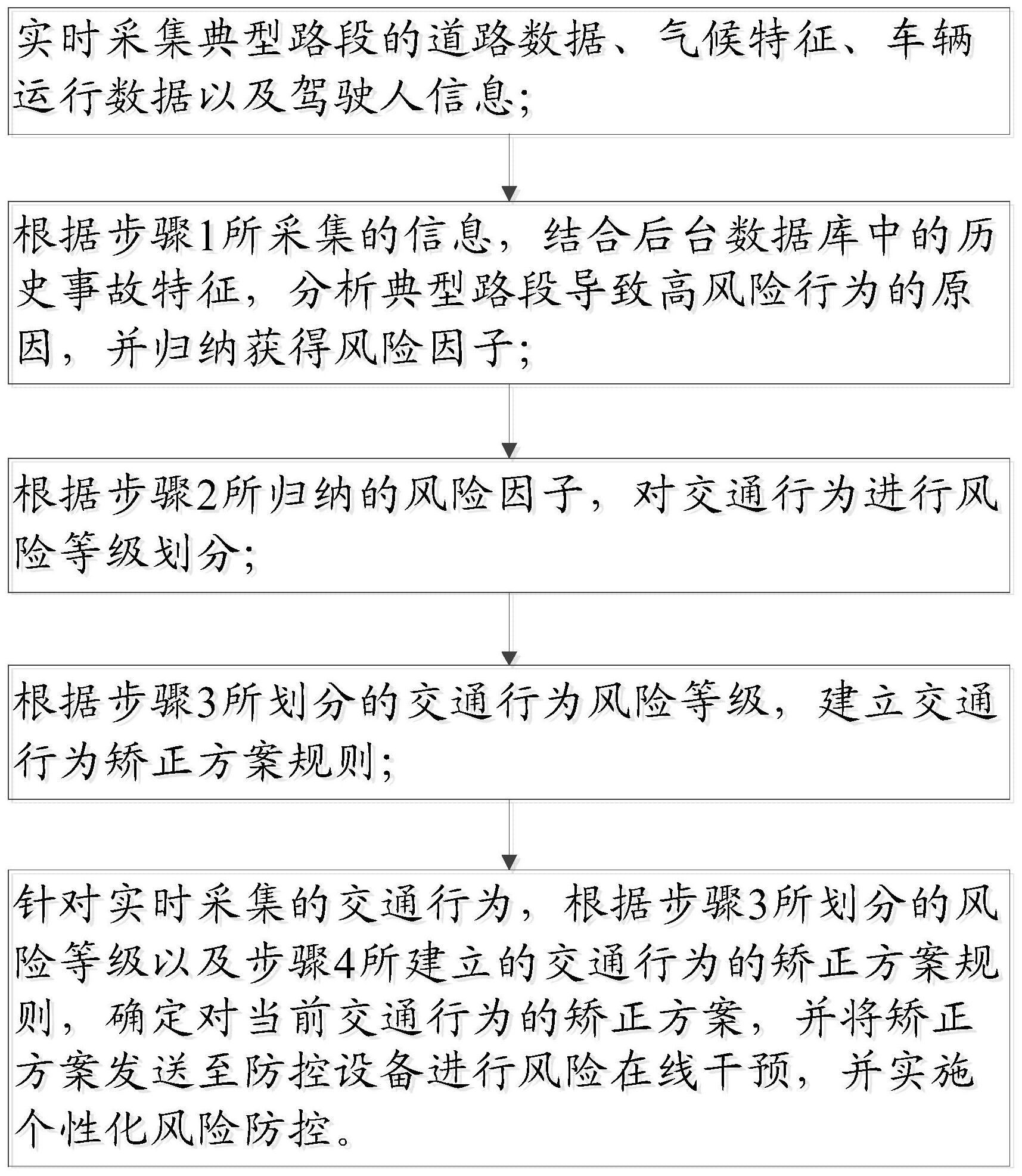
针对现有技术中存在的问题,本发明的目的在于提供一种主动触发式多模态风险 自助矫正和差异化干预方法,可实现高风险交通行为的多模态、差异化的自助矫正,降低交 通事故的发生率。 为达到上述目的,本发明采用以下技术方案予以实现。 一种主动触发式多模态风险自助矫正和差异化干预方法,包括以下步骤: 步骤1,实时采集典型路段的道路数据、气候特征、车辆运行数据以及驾驶人信息; 步骤2,根据步骤1所采集的信息,结合后台数据库中的历史事故特征,分析典型路 段导致高风险行为的原因,并归纳获得风险因子K; 步骤3,根据步骤2所归纳的风险因子K,对交通行为进行风险等级划分; 步骤4,根据步骤3所划分的交通行为风险等级,建立交通行为矫正方案规则; 步骤5,针对实时采集的交通行为,根据步骤3所划分的风险等级以及步骤4所建立 的交通行为的矫正方案规则,确定对当前交通行为的矫正方案,并将矫正方案发送至防控 设备进行风险在线干预,并实施个性化风险防控。 本发明技术方案的特点和进一步的改进在于: 优选的,步骤2中,所述风险因子K的确定方法为: K=a1·m1 a2·m2 … an·mn 其中,a为具体的风险因素,n为风险因素的种类;m为每个风险因素的权重。 其中,所述具体的风险因素包含驾驶人个体特征、驾驶人违法与事故记录、车辆类 型、车辆运行速度、车辆运行轨迹、车辆与车辆的位置关系、车辆与车辆的运动关系、道路种 类和气候特征。 进一步的,所述每个风险因素的权重的确定方法为: 对于每一种风险因素,采用专家打分法获得对应风险因素的权重,再结合后台数 据库中的历史数据,对所述采用专家打分法获得对应风险因素的权重进行修正,最终获得 每个风险因素的权重。 3 CN 111583638 A 说 明 书 2/5 页 优选的,步骤3中,将交通行为的风险等级划分为5个等级,分别为:无风险、一般风 险、中等风险、高等级风险、亟需处理的突发严重风险。 优选的,步骤4中,所述交通行为矫正方案规则中包含不同交通行为分别在不同风 险等级的矫正方案; 其中,所述矫正方案包含通过声音、灯光和LED字符显示进行矫正。 优选的,采用专家打分法分别确定声音、灯光和LED字符显示对不同风险等级的交 通行为的有效性权重矩阵R[R1,R2,R3],其中,1代表声音,2代表灯光,3代表LED字符显示。 优选的,步骤5包含以下子步骤: 子步骤5.1,针对实时采集的交通行为,首先确定所述实时采集的交通行为的种 类; 子步骤5.2,根据步骤3所划分的风险等级,确定当前交通行为所属的风险等级级 别; 子步骤5.3,根据步骤4所建立的交通行为矫正方案规则,确定针对当前交通行为 的矫正方案,并将矫正方案发送至防控设备进行风险在线干预,实施个性化风险防控。 与现有技术相比,本发明的有益效果为: 本发明的主动触发式多模态风险自助矫正和差异化干预方法结合路侧和车载信 息对风险路段的高风险交通行为进行干预与矫正,相比以往传统的风险警告模式单一、防 控手段被动的问题,更加保证了对高风险行为多角度、多维度的检测、预警和自助矫正,有 效保证了行车安全,有实际应用价值。 附图说明 为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现 有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本 发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以 根据这些附图获得其他的附图。 图1为本发明的主动触发式多模态风险自助矫正和差异化干预方法的一种实施例 的流程示意图。











