
技术摘要:
本发明属于枯死木识别技术领域,公开了一种可见光遥感图像枯死木识别软件系统及识别方法,可见光遥感图像枯死木识别软件系统包括:树木遥感图像采集模块、中央控制模块、遥感图像校正模块、遥感图像增强模块、遥感图像分割模块、图像特征提取模块、枯死木识别模块、枯 全部
背景技术:
枯死木是指已枯死的树木。所以枯木是指将枯死或已枯未朽的树木,包括枝、干、 根及其附生物(如:瘤)等部分。枯死木,因各种原因已枯死的树木。常是病虫害发生、繁衍的 温床。由于自然稀疏在林内出现较多的枯死木时,标志着林分过密,应及时进行抚育间伐; 因自然衰老出现枯死木时,标志着林分过熟,应及时主伐更新。当其他原因林内出现多数枯 死木时,也应通过卫生伐及时代除。然而,现有可见光遥感图像枯死木识别软件系统在获取 遥感影像的过程中,受卫星姿态定位误差、相机成像误差等影响,使得遥感树木图像都具有 一定的偏差;同时,对于遥感树木图像的分割处理需要耗费大量的人力物力,成本高,且时 间较慢。 综上所述,现有技术存在的问题及缺陷为:现有可见光遥感图像枯死木识别软件 系统在获取遥感影像的过程中,受卫星姿态定位误差、相机成像误差等影响,使得遥感树木 图像都具有一定的偏差;同时,对于遥感树木图像的分割处理需要耗费大量的人力物力,成 本高,且时间较慢。
技术实现要素:
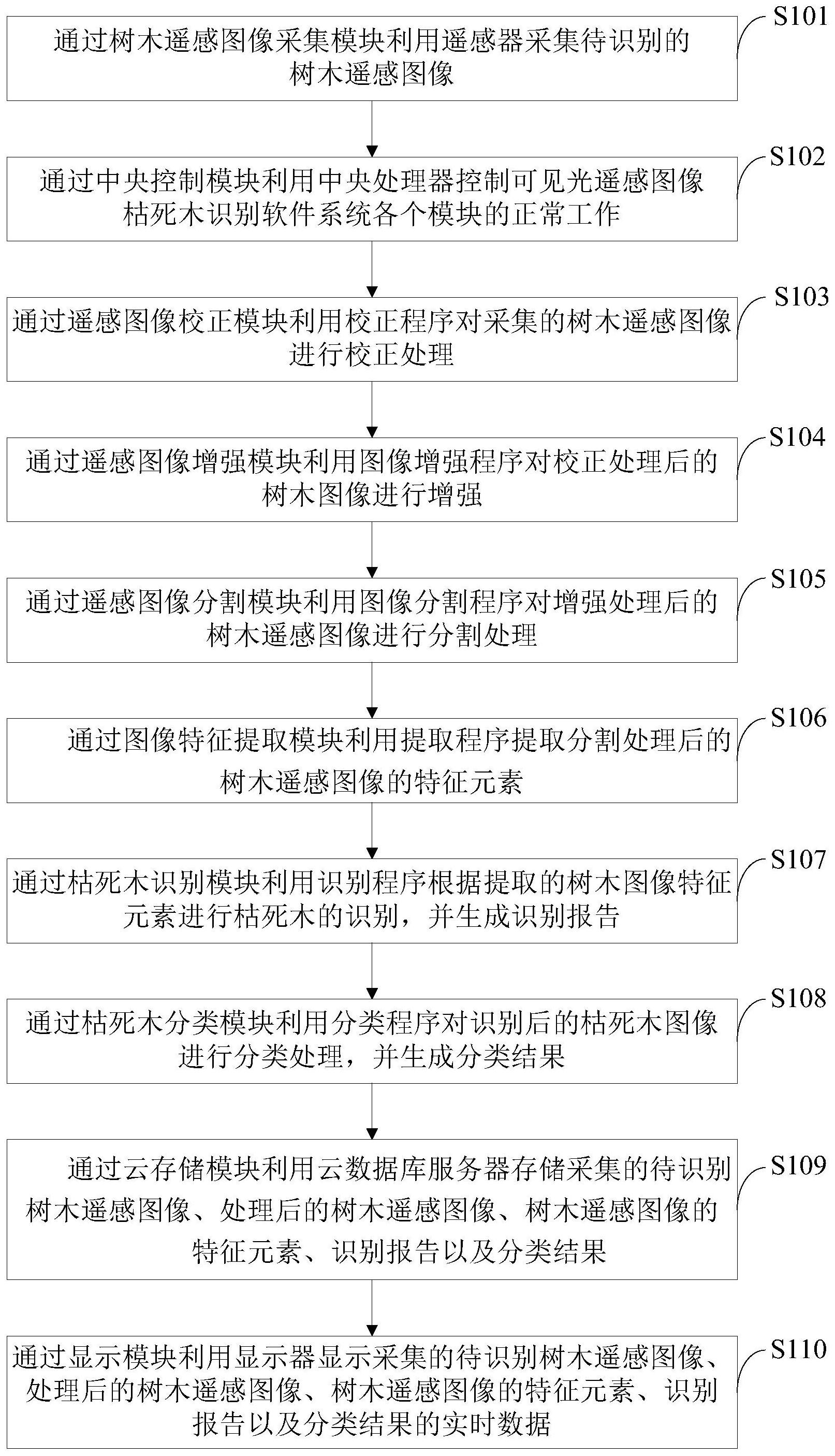
针对现有技术存在的问题,本发明提供了一种可见光遥感图像枯死木识别软件系 统及识别方法。 本发明是这样实现的,一种可见光遥感图像枯死木识别方法,所述可见光遥感图 像枯死木识别方法包括以下步骤: 步骤一,通过树木遥感图像采集模块利用遥感器采集待识别的树木遥感图像;通 过中央控制模块利用中央处理器控制可见光遥感图像枯死木识别软件系统各个模块的正 常工作。 步骤二,通过遥感图像校正模块利用遥感设备提取多个树木遥感图像;通过图像 修复程序对树木遥感图像进行修复,将多个所述树木遥感图像在GPS坐标系中进行拼接,获 得一幅拼接的树木遥感图像。 步骤三,利用转换程序将所述拼接的树木遥感图像在GPS坐标系下的空间向量转 换为WGS-84坐标系下的空间向量;在地面上找到与所述拼接的树木遥感图像中对应的N个 点作为标准点,N为大于或等于2的整数。 步骤四,通过校正程序根据N个所述标准点在地面上的GPS坐标对应的WGS-84坐标 系下的第一空间向量组和N个所述标准点在所述拼接的树木遥感图像中的坐标对应的WGS- 84坐标系下的第二空间向量组确定校验四元数。 步骤五,根据校验四元数对所述拼接的树木遥感图像中所有坐标点进行校正处 6 CN 111582176 A 说 明 书 2/10 页 理;通过遥感图像增强模块利用图像增强程序对校正处理后的树木遥感图像进行增强处 理。 步骤六,通过遥感图像分割模块获取用户输入的树木遥感影像样本和每个样本对 应的树木标签数据。 步骤七,采用所述树木遥感影像样本和所述树木标签数据,利用神经网络对识别 分割模型进行训练,得到神经网络分割模型。 步骤八,获取待分割的遥感图像,通过图像分割程序利用所述神经网络分割模型 对所述待分割的增强处理后的树木遥感图像进行分类,得到标注好树木标签的分割结果。 步骤九,通过图像特征提取模块利用提取程序提取分割处理后的树木遥感图像的 特征元素;通过枯死木识别模块利用识别程序根据提取的树木图像特征元素进行枯死木的 识别,并生成识别报告。 步骤十,通过枯死木分类模块的第一滑窗在树木遥感图像中提取大尺度区域,并 输入到训练好的枯死木候选区域识别模型中,得到包含枯死木候选目标的枯死木候选区 域。 步骤十一,通过第二滑窗在步骤十得到的枯死木候选区域中提取枯死木候选目 标,利用训练好的枯死木目标分类模型对提取的枯死木候选目标进行两步分类,确定枯死 木候选目标的类别,并生成分类结果。 步骤十二,通过云存储模块利用云数据库服务器存储采集的待识别树木遥感图 像、处理后的树木遥感图像、树木遥感图像的特征元素、识别报告以及分类结果。 步骤十三,通过显示模块利用显示器显示采集的待识别树木遥感图像、处理后的 树木遥感图像、树木遥感图像的特征元素、识别报告以及分类结果的实时数据。 进一步,步骤三中,所述遥感图像中每个坐标点(x′,y′)对应一个地理坐标信息 (Long,Lat),Long表示经度,Lat表示纬度,将所述拼接的遥感图像在GPS坐标系下的空间向 量转换为WGS-84坐标系下的空间向量的向量转换公式为: 其中,v表示WGS-84坐标系下的空间向量。 进一步,步骤四中,所述校验四元数表示为: 其中,ω表示所述第一空间向量组与所述第二空间向量组的正交投影得到的矩阵 的特征向量;将所述校验四元数转变为变换矩阵的形式,所述变换矩阵表示为: 7 CN 111582176 A 说 明 书 3/10 页 则u=E·v,u表示所述拼接的遥感图像中的空间向量v校正后的空间向量。 进一步,所述校正后的空间向量u转换为经纬度的公式为: Latadi=arcsinu(3), 式中,空间向量u为3行1列的向量,u(1)表示空间向量u的第一行的元素,u(2)表示 空间向量u的第二行的元素,u(3)表示空间向量u的第三行的元素,Latadj表示转换后的纬 度,Longadj表示转换后的经度。 进一步,步骤七中,所述采用所述树木遥感影像样本和所述树木标签数据,利用神 经网络对识别分割模型进行训练,得到神经网络分割模型的方法,包括: (1)获取用户输入的多项超参数;所述超参数包括学习率、批处理大小和迭代次 数;获取所述用户选择的优化器类型、评估函数和损失函数; (2)采用封装好的神经网络,结合所述多项超参数、所述优化器类型、所述评估函 数和所述损失函数,利用所述遥感影像样本和所述树木标签数据对所述识别分割模型进行 训练; (3)判断当次训练结束后的训练状态是否符合所述用户输入的预期条件,得到第 一判断结果;当所述第一判断结果表示当次训练结束后的训练状态符合所述用户输入的预 期条件时,训练结束,将当次训练结束后的识别分割模型确定为所述神经网络分割模型; (4)当所述第一判断结果表示当次训练结束后的训练状态不符合所述用户输入的 预期条件时,调整训练参数,更新迭代次数;返回采用封装好的神经网络,结合所述多项超 参数、所述优化器类型、所述评估函数和所述损失函数,利用所述遥感影像样本和所述树木 标签数据对所述识别分割模型进行训练的步骤。 进一步,所述采用封装好的神经网络,结合所述多项超参数、所述优化器类型、所 述评估函数和所述损失函数,利用所述遥感影像样本和所述树木标签数据对所述识别分割 模型进行训练的方法,包括: 1)对所述遥感影像样本进行线性拉伸和归一化操作,得到预处理的遥感影像样 本; 2)结合所述预处理的遥感影像样本,采用所述封装好的神经网络对所述识别分割 模型进行训练。 进一步,步骤十中,所述枯死木候选区域识别模型包括:第二卷积神经网络和若干 8 CN 111582176 A 说 明 书 4/10 页 第二分类器,每个第二分类器分别与枯死木候选目标的两个可能类别相对应; 所述第二卷积神经网络为VGGNet-16,包含13个卷积层、2个全连接层和1个输出 层;分别从全连接层和输出层中提取枯死木候选目标的特征,所述输出层提取的特征用于 确定候选目标的前M个可能类别; 所述第二分类器均为LIBSVM分类器,通过所述全连接层提取的枯死木候选目标的 特征,在所述前M个可能类别中确定枯死木候选目标的最终类别。 本发明的另一目的在于提供一种应用所述的可见光遥感图像枯死木识别方法的 可见光遥感图像枯死木识别软件系统,所述可见光遥感图像枯死木识别软件系统包括: 树木遥感图像采集模块、中央控制模块、遥感图像校正模块、遥感图像增强模块、 遥感图像分割模块、图像特征提取模块、枯死木识别模块、枯死木分类模块、云存储模块、显 示模块。 树木遥感图像采集模块,与中央控制模块连接,用于通过遥感器采集待识别的树 木遥感图像; 中央控制模块,与树木遥感图像采集模块、遥感图像校正模块、遥感图像增强模 块、遥感图像分割模块、图像特征提取模块、枯死木识别模块、枯死木分类模块、云存储模 块、显示模块连接,用于通过中央处理器控制可见光遥感图像枯死木识别软件系统各个模 块的正常工作; 遥感图像校正模块,与中央控制模块连接,用于通过校正程序对采集的树木遥感 图像进行校正处理; 遥感图像增强模块,与中央控制模块连接,用于通过图像增强程序对校正处理后 的树木图像进行增强; 遥感图像分割模块,与中央控制模块连接,用于通过图像分割程序对增强处理后 的树木遥感图像进行分割处理; 图像特征提取模块,与中央控制模块连接,用于通过提取程序提取分割处理后的 树木遥感图像的特征元素; 枯死木识别模块,与中央控制模块连接,用于通过识别程序根据提取的树木图像 特征元素进行枯死木的识别,并生成识别报告; 枯死木分类模块,与中央控制模块连接,用于通过分类程序对识别后的枯死木图 像进行分类处理,并生成分类结果; 云存储模块,与中央控制模块连接,用于通过云数据库服务器存储采集的待识别 树木遥感图像、处理后的树木遥感图像、树木遥感图像的特征元素、识别报告以及分类结 果; 显示模块,与中央控制模块连接,用于通过显示器显示采集的待识别树木遥感图 像、处理后的树木遥感图像、树木遥感图像的特征元素、识别报告以及分类结果的实时数 据。 本发明的另一目的在于提供一种存储在计算机可读介质上的计算机程序产品,包 括计算机可读程序,供于电子装置上执行时,提供用户输入接口以实施所述的可见光遥感 图像枯死木识别方法。 本发明的另一目的在于提供一种计算机可读存储介质,储存有指令,当所述指令 9 CN 111582176 A 说 明 书 5/10 页 在计算机上运行时,使得计算机执行所述的可见光遥感图像枯死木识别方法。 结合上述的所有技术方案,本发明所具备的优点及积极效果为:本发明通过遥感 图像校正模块将多个遥感图像统一坐标系,将地面上的真实位置的坐标作为标准点,使遥 感图像中遥感图像中坐标点根据对应的地面树木位置进行校正,提高了遥感图像中遥感数 据的准确度;通过遥感图像分割模块将先进的深度学习方法与树木遥感影像地物识别结合 起来,实现在遥感图像中对地物分割效果;具有更高的效率和准确率;允许对树木遥感图像 进行批处理分类,即一次操作可以分类多张影像,极大地提高了使用效率及操作成本。 同时,本发明通过枯死木识别模块针对可见光遥感图像目标的聚集性特点进行候 选目标提取,并通过两步分类精确识别候选目标类别;在相同的召回率下,提取的候选目标 数量远少于现有方法,同时,在使用相同的特征和相同的分类器的条件下,通过两步分类, 大大提高了候选目标分类精度。另外,本发明应用场景广泛,适用于可见光遥感图像中的飞 机、舰船、车辆等多类目标;还可扩展应用于红外、高光谱、合成孔径雷达候选目标提取与分 类,可以满足各种环境场合。 附图说明 图1是本发明实施例提供的可见光遥感图像枯死木识别方法流程图。 图2是本发明实施例提供的可见光遥感图像枯死木识别软件系统结构框图; 图中:1、树木遥感图像采集模块;2、中央控制模块;3、遥感图像校正模块;4、遥感 图像增强模块;5、遥感图像分割模块;6、图像特征提取模块;7、枯死木识别模块;8、枯死木 分类模块;9、云存储模块;10、显示模块。 图3是本发明实施例提供的通过校正程序对采集的树木遥感图像进行校正处理的 方法流程图。 图4是本发明实施例提供的通过图像分割程序对增强处理后的树木遥感图像进行 分割处理的方法流程图。 图5是本发明实施例提供的通过分类程序对识别后的枯死木图像进行分类处理, 并生成分类结果的方法流程图。











