
技术摘要:
本发明公开了一种自动识别取证目标跟踪方法,属于图像识别领域,通过摄像头集群对一定区域极性扫描识别,然后再把每个摄像头联合起来,完成对一个区域的取证识别跟踪,并通过对每个摄像头单独设置跟踪识别处理器,减少了摄像头实现多个目标跟踪时出现的响应延迟情况, 全部
背景技术:
照片被用作记录事件、人物和地点已有100多年的历史。随着创新的设备和技术的 广泛使用,拍摄获得的图像数量不断增加,数字图像现在已是无处不在。技术的进步,使得 数字媒体及数字图像已经成为我们主要的信息来源,它们被用作法庭上的证据、病历的一 部分以及财务文件。在实践中,数字图像取证,可以简单定义为如下过程:第一步,在可疑装 置中获取图像证据,以及对这些提取出来的图像进行更有效地搜索和组织。第二步,对图像 的源属性和认证进行分析;第三步,取证专家在法庭中给出有关调查结果。 但是随着技术的发展,简单的图像视频取证已经不能满足相关单位的需求,特别 是一些需要跟踪目标的取证,因此,需要设计一种具有实跟踪的方法,对目标物进行实时的 跟踪。
技术实现要素:
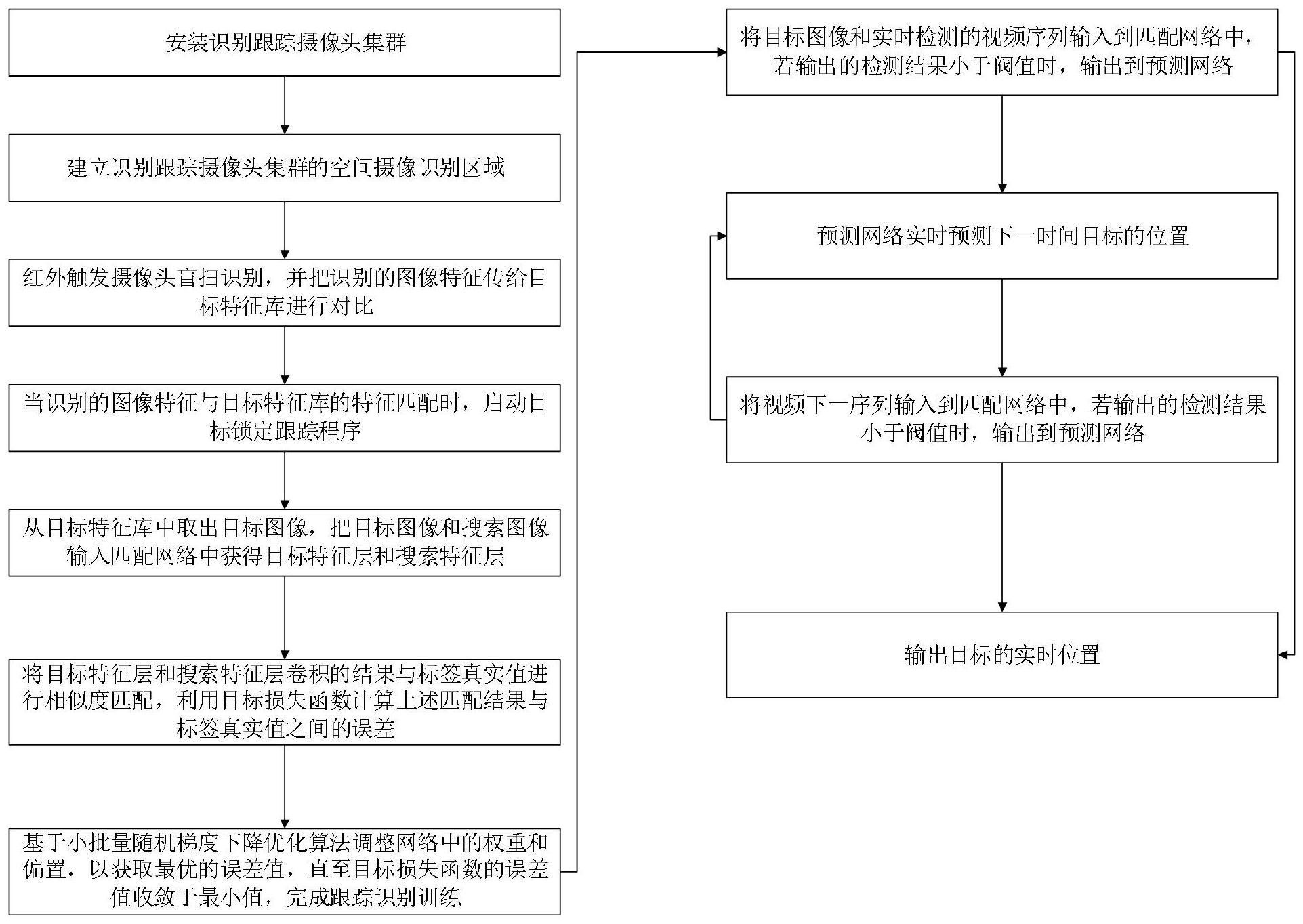
本发明的目的在于提供一种自动识别取证目标跟踪方法,解决现有图像取证不能 实时跟踪的技术问题。 一种自动识别取证目标跟踪方法,所述跟踪方法包括如下步骤: 步骤1:在取证的空间区域内安装识别跟踪摄像头集群,并把每个摄像头均连接入 数据处理服务器。 步骤2:对需要取证的空间区域进行建立识别跟踪摄像头集群的空间摄像识别区 域,并划定每个摄像头的摄像区域。 步骤3:红外触发并由摄像头盲扫识别,并把识别的图像特征传给目标特征库进行 对比。 步骤4:当识别的图像特征与目标特征库的特征匹配时,启动目标锁定跟踪程序。 步骤5:从目标特征库中取出目标图像,把目标图像和搜索图像输入匹配网络中获 得目标特征层和搜索特征层。 步骤6:将目标特征层和搜索特征层卷积的结果与标签真实值进行相似度匹配,利 用目标损失函数计算上述匹配结果与标签真实值之间的误差。 步骤7:基于小批量随机梯度下降优化算法调整网络中的权重和偏置,以获取最优 的误差值,直至目标损失函数的误差值收敛于最小值,完成跟踪识别训练。 步骤8:将目标图像和实时检测的视频序列输入到匹配网络中,若输出的检测结果 小于阀值时,输出到预测网络并输出目标时间点位置。 步骤9:预测网络实时预测下一时间目标的位置,当目标的位置为边界域时,发出 指令通知与边界域相邻的摄像头盲扫识别模式。 步骤10:将视频下一序列输入到匹配网络中,若输出的检测结果小于阀值时,输出 5 CN 111598180 A 说 明 书 2/7 页 到预测网络返回步骤9。 步骤11:重复步骤9-步骤10输出目标的实时位置。 所述步骤2的具体过程为: 建立三维空间模型,选定三轴零点,三轴为X轴、Y轴和Z轴,则监控的区域由三轴正 负方向延长构成,摄像区域即为每个摄像头的所能拍摄到的空间区域。 所述步骤3中的具体过程为: 在每个摄像头上均安装有红外感应器和超声波感应器,当摄像头没有接收到数据 处理服务器的跟踪识别指令时,红外感应器感应到有物体进入摄像区域时,开启摄像头对 整个摄像区域进行摄像设别,识别时,将图像拍摄并由超声波感应器感应拍摄图像的具体 距离,把图像分成若干块单元图像并识别,并在单元图像上标注空间域坐标,把识别的每个 单元图像的图像特征传给数据处理服务器的目标特征库进行对比。 所述步骤4的具体过程为:当其中的一个摄像头发现目标物时,数据处理服务器构 建具有单独处理数据功能的处理单元,处理单元为数据处理接口和处理数据等级参数,并 分配处理器进行目标锁定跟踪,处理器为接入数据处理服务器的控制数据处理器。 所述步骤5的具体过程为: 从目标特征库中取出目标图像传给相应的处理器,处理器具有单独处理数据的功 能,并嵌入匹配网络,目标图像和搜索图像输入匹配网络后,先对目标图像特征提取得到目 标特征层,然后在对搜索图像进行特征识别得到搜索特征层。 所述步骤6的具体过程为:把目标特征层和搜索特征层进行卷积运算处理,得到真 实值,并进行相似度匹配,利用以下目标损失函数计算匹配结果与标签真实值之间的误差, Loss=Errorcoord Erroriou Errorcls 其中Errorcoord、Erroriou和Errorcls分别表示预测包围盒的误差、IOU误差和分类误 差;λcoord为坐标误差权重;S2是将输入图像分割为的网格数,B是每个网格生成的包围框数; 如果 等于1,则第j个包围框在第i网格内覆盖了目标;否则 等于0; 为预 测边界框的中心坐标值及其宽度和高度,(xi,yi,wi,hi)为真实的边界框的中心坐标值及其 宽度和高度;λnoobj为对边界框进行预测时置信度损失的权重;ci为预测的置信度; 为真实 的置信度;pi(c)是在网格i内目标属于c的真实概率, 是预测的概率。 所述步骤7中的小批量随机梯度下降优化算法的边界框坐标的算式如下: bx=σ(tx) cx by=σ(ty) cy 6 CN 111598180 A 说 明 书 3/7 页 其中,(cx,cy)表示网格左上角的坐标,(σ(tx),σ(ty))表示偏移量,(pw,ph)表示先 验框的宽度和高度,(bx,by,bw,bh)表示最终预测得到边界框的坐标。 所述步骤8中,识别过程,选取感兴趣单元图像,然后先对单元图像进行对比识别, 选取感兴趣单元图像的具体过程为: 首先,给每个单元图像一个权重,不同的单元图像以匹配不同的值,根据感兴趣的 单元图像分配更高的值,感兴趣的单元图像值是所有类别中最大的分值,可以根据不同的 需求自由分配每个单元图像的值,将单元图像分值的方程式设置为: 其中c(xi)代表第i个单元图像的值; 将类别进行排序并分别给各个别类赋予分值; 检测到的多个单元图像中,由于每个单元图像的面积不同,对每个单元图像的面 积赋予第二权重,权重与单元图像区域面积的乘积是选择单元图像的第二个因素,单元图 像区域的大小设置为 si=ωi·hi 其中,ωi代表单元图像边界框的宽度,hi代表单元图像边界框的高度, 选择最佳的单元图像,对单元图像的准确性给予第三权重,权重与准确性的乘积 是目标的第三个因素,表明对目标的准确性更高; 通过多尺度检测对前三个帧的检测,对单元图像的速度赋予第四权重,表明单元 图像越快,对其越感兴趣,速度方程设置为 其中,di是从第一帧到第十帧的距离,Δt代表从第一帧到第十帧的时间,分别设 置为 Δt=t2-t1 其中xi第一帧单元图像的坐标和时间为(x1,y1)i和t1,第十帧单元图像的坐标和时 间为(x2,y2)i和t2。 本发明采用了上述技术方案,本发明具有以下技术效果: 本发明通过对每个摄像头设置单独的跟踪识别处理器,在每个摄像头对多个目标 跟踪时,不会出现响应延迟的情况,经过实践对比,设置多个处理器,与单独一个服务器处 理,效率提高60%,同时处理跟踪的速度更快,位置精度更高,通过预测与实时跟踪进行结 合,使得跟踪的响应更加灵敏,不但能够实时取证,能够提供跟踪目标的实时运动路线,为 先关单位提供线索,更好的破案。 附图说明 图1是本发明的方法流程图。 7 CN 111598180 A 说 明 书 4/7 页 图2是本发明的预测网络原理图。











