
技术摘要:
本发明涉及电缆释放技术领域,本发明公开了一种变电站电缆释放机器人,包括机壳,所述机壳上设置有探测机构,所述机壳的两侧设置有两个用于行走的行走机构,所述机壳的两侧壁设置有夹取电缆的夹紧机构,所述夹取机构通过旋转机构和所述机壳活动连接,所述机壳上设置有 全部
背景技术:
现有的变电站建设阶段,现场需沿着电缆沟或管道释放大量控制电缆及电力电 缆,以实现电源传输、设备监测、远方控制等功能。电缆要求平整排放在电缆沟不同支架上, 电缆支架起到支撑电缆的作用,一般沿着电缆沟布置,并上下进行分层排放。正常情况下, 变电站现场电缆施工放线均采用人工释放方式,沿着电缆沟等距离各站一个人,分别向前 牵拉电缆并布置在合理支架位置,这样需要耗费较大的人力,且工作效率低。
技术实现要素:
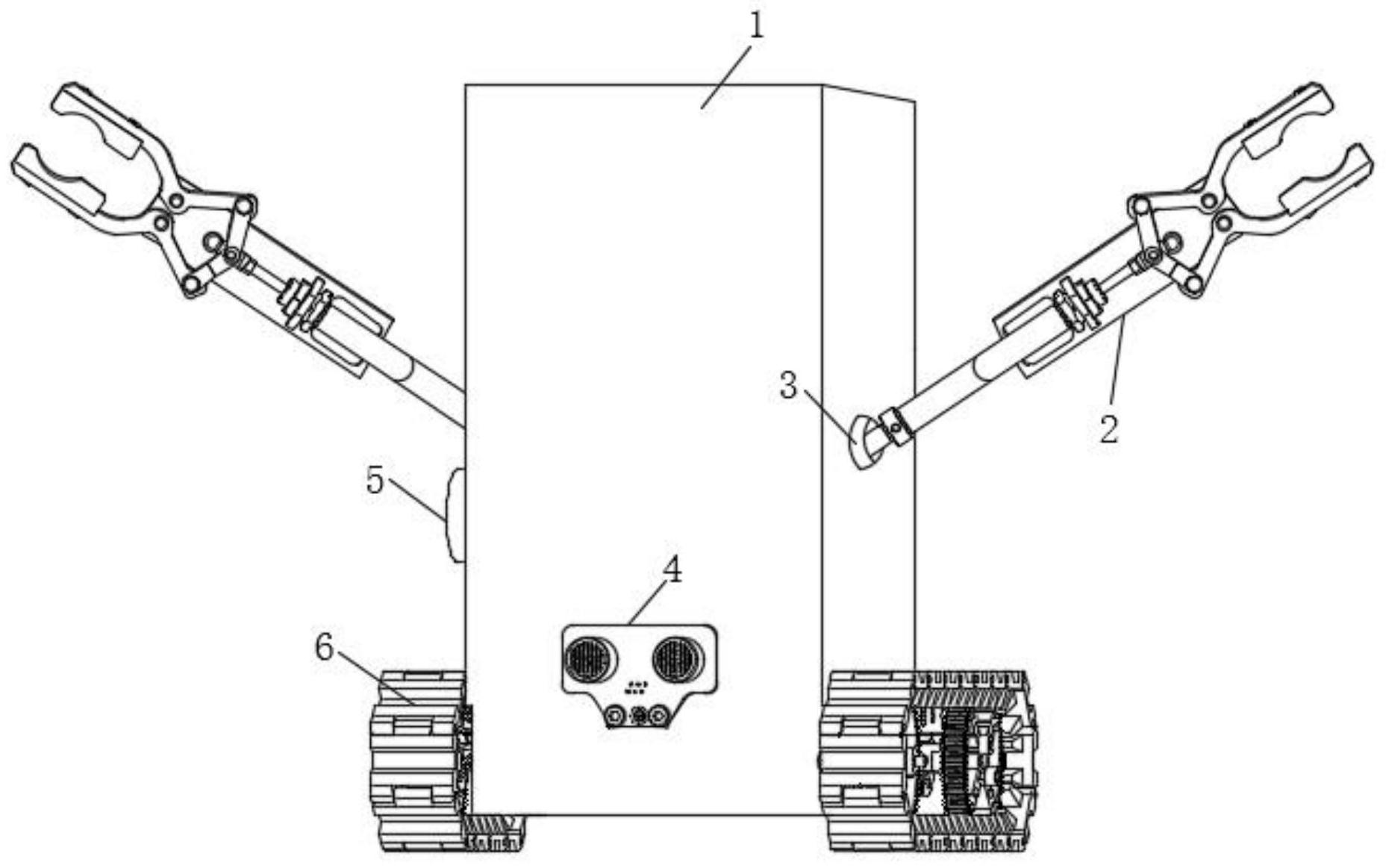
本发明的目的就在于为了解决现有的变电站建设阶段,现场需沿着电缆沟或管道 释放大量控制电缆及电力电缆,以实现电源传输、设备监测、远方控制等功能。电缆要求平 整排放在电缆沟不同支架上,电缆支架起到支撑电缆的作用,一般沿着电缆沟布置,并上下 进行分层设计。正常情况下,变电站现场电缆施工放线均采用人工释放方式,沿着电缆沟等 距离各站一个人,分别向前牵拉电缆并布置在合理支架位置,这样需要耗费较大的人力,且 工作效率低的问题,采用自动牵拉、排放电缆的机器人,代替传统人工操作,可有效解决人 力资源紧缺的情况。该机器人具有可沿电缆沟直线、转弯行驶,可前后左右转向调整的功 能;机器人手臂具备可靠夹持不同粗细电缆功能;机器人手臂可上下调整,以适用不同高度 支架排放需求;机器人手臂可实现伸缩调整,以适用不同宽度支架的电缆排放;机器人一般 具备红外或激光定位系统,可在电缆沟关键部位布置控制点,指引机器人行动轨迹;机器人 可通过手持设备控制其前行、停止、转弯等功能;机器人需为电力驱动,采用电池充电方式 的电缆释放机器人。 本发明的目的可以通过以下技术方案实现:一种变电站电缆释放机器人,包括机 壳,所述机壳上设置有探测机构,所述机壳的两侧设置有两个用于行走的行走机构,所述机 壳的两侧壁设置有夹取电缆的夹紧机构,所述夹取机构通过旋转机构和所述机壳活动连 接,所述机壳上设置有用于驱动夹紧机构的传动机构;通过设置的行走机构能够起到便于 沿着电缆沟进行行走,能够将需要进行排放的电缆放置到电缆沟上的指定位置,通过设置 的探测机构,在行走的过程中能够起到便于探测障碍物的功能,通过设置的旋转机构能够 起到便于旋转机构转动的功能,通过设置的夹紧机构能够起到便于夹紧电缆,当行走机构 进行移动的时候,夹紧机构拉动电缆进行同步移动。通过设置的传动机构来实现调整夹紧 机构的位置,从而使得夹紧机构夹取线缆的位置可进行调节,通过设置的夹紧机构进行夹 紧伸缩的同时,还能够进行调整电缆的位置。 优选的,所述机壳的内部设置有支座,所述支座的上方安装有蓄电池,所述机壳的 内侧壁设置有线管,所述线管的内部安装有导线,所述导线上设置有螺旋线,且所述螺旋线 为螺旋形结构,所述螺旋线和所述夹紧机构连接;通过设置的螺旋线在夹紧机构进行旋转 4 CN 111571555 A 说 明 书 2/7 页 的时候,螺旋线会张开,起到缓冲拉力的功能,使得螺旋线会被拉伸,通过设置的导线和螺 旋线的连接,并且螺旋线能够将导线的电能传递给液压泵,使得液压泵工作;线管能够起到 支撑导线和保护导线的功能,通过设置的蓄电池能够为该机器人进行供能,保证机器人的 正常运行。 优选的,所述夹紧机构包括与所述旋转机构连接的卡杆,所述卡杆的端部固定有 第二液压缸,所述第二液压缸的端部连接有第一液压缸,所述第一液压缸的底部固定有垫 板,所述垫板的表面上设置有固定的两个固定销,所述第一液压缸的内部连接有液压杆,所 述液压杆的端部连接有第二活动销,所述第二活动销和两个活动杆的端部连接,所述活动 杆的另一端部通过第一活动销和连接杆连接,所述连接杆的端部连接有一体成型的夹杆, 所述连接杆和所述夹杆的连接处设置有通孔,所述通孔套设在所述固定销上,所述通孔和 所述固定销之间为活动连接,所述夹杆的内侧壁设置有夹垫,所述夹垫的中部设置有内凹 的夹口。通过设置的固定销固定在垫板上,第一液压缸固定在垫板上,使得固定销和第一液 压缸的位置不会发生相对移动;当第一液压缸工作的时候,第一液压缸会推动液压杆进行 伸长,当液压杆伸长的时候,液压杆端部的第二活动销被推动,第二活动销带动活动杆移 动,活动杆端部固定的第一活动销被推动,第一活动销带动连接杆围绕固定销发生转动,当 连接杆转动后,使得连接杆的端部远离液压杆,由于连接杆的端部设置有一体成型的夹杆, 固定销位于连接杆和夹杆的连接处,使得夹杆在转动的时候,夹杆两端固定的夹垫会夹住 位于夹口内部的电缆,从而使得电缆会被夹紧机构夹紧。 优选的,所述旋转机构包括与所述夹紧机构上的卡杆固定的旋转球,所述旋转球 设置在内槽的内部,所述内槽设置在所述凸块的内部,所述凸块与所述旋转球之间活动连 接,所述凸块的内部固定有传动机构上的传动杆,所述机壳的侧壁设置有用于稳定夹紧机 构的稳定套。通过设置的旋转机构能够起到调节旋转球的位置,从而起到与调节旋转球与 夹紧机构的位置,使得夹紧机构位置被调节,被夹紧机构夹紧的电缆会被调节;通过设置的 内槽和旋转球的配合,使得旋转球始终位于内槽的内部。 优选的,所述传动机构包括与所述旋转机构连接的传动杆,所述传动杆的两端均 设置有固定在机壳上的轴承,所述传动杆的端部设置有固定在机壳侧壁上的伺服电机。通 过设置的伺服电机的转动带动传动杆转动,传动杆驱动旋转机构转动,从而起到调节夹紧 机构的位置;通过设置的轴承能够起到支撑传动杆进行传动的功能。 优选的,所述行走机构包括固定在支座上的支板,所述支板上设置有主动轮和从 动轮,所述主动轮和所述从动轮的外圆周上套设有履带,所述主动轮的端部连接有稳定板, 所述稳定板的一侧设置有驱动电机,且所述驱动电机的端轴贯穿所述稳定板的内部与所述 主动轮连接。通过设置的驱动电机便于驱动机器人进行行走,通过设置的支座和支板的连 接,能够起到稳定支撑行走机构进行移动,使得行走机构在移动的过程中稳定性较佳。 优选的,所述探测机构包括安装在与所述支座连接的底板上的PLC控制器,所述 PLC控制器和红外探测器连接,所述红外探测器通过固定板固定在所述底板上,所述固定板 通过螺栓固定连接。通过设置的探测机构内的红外探测器进行探测感应,从而避开障碍物。 优选的,所述PLC控制器通过导线分别连接伺服电机、驱动电机,通过设置的PLC控 制器能够起到控制。 一种变电站电缆释放机器人,该机器人的使用方法,具体包括以下步骤: 5 CN 111571555 A 说 明 书 3/7 页 步骤一:将需要进行移动的电缆放置到夹紧机构上进行夹紧,通过PLC控制器控制 第一液压缸和第二液压缸内部的液压泵进行工作,液压泵驱动第二液压缸内部的液压杆进 行伸缩;当第二液压缸驱动的时候,第二液压缸带动第一液压缸进行伸缩,从而起到调节夹 紧机构的长度,第一液压缸在伸展的时候,第一液压缸推动液压杆进行伸长,当液压杆伸长 的时候,液压杆端部的第二活动销被推动,在垫板的上方移动,当第二活动销移动的时候, 第二活动销带动活动杆移动,使得活动杆由倾斜的方向变成与液压杆相垂直的方向,活动 杆端部固定的第一活动销被推动,第一活动销带动连接杆围绕固定销发生转动,连接杆转 动后,使得连接杆的端部远离液压杆,由于连接杆的端部设置有一体成型的夹杆,固定销位 于连接杆和夹杆的连接处,使得夹杆在转动的时候,夹杆的两端相互靠近,夹杆两端固定的 夹垫会夹住位于夹口内部的电缆,从而使得电缆会被夹紧机构夹紧; 步骤二:当PLC控制器控制伺服电机运行,伺服电机带动传动杆转动,传动杆转动 的时候,会带动固定在传动杆上的凸块转动,凸块转动的时候,带动位于其内部的内槽同步 转动,内槽内部的旋转球会在内槽的内部进行移动,旋转球卡在内槽的内部,使得旋转球随 着内槽的转动,不会脱离内槽的内部,旋转球始终位于内槽的顶部,凸块的形状使得旋转球 转动的轨迹和凸块的形状相同,从而起到对夹紧机构的位置进行调节,在进行调节夹紧机 构方向的同时,夹紧机构还能同步进行伸缩,从而便于调节夹紧机构夹取电缆的位置; 步骤三:PLC控制器控制驱动电机的转动,从而能够实现控制主动轮的运行,主动 轮的运行能够带动履带转动,履带转动会带动另外一个从动轮同步进行移动,主动轮通过 连接轴与机壳另一侧的从动轮连接,使得主动轮和从动轮实现同步转动;在行走机构向前 移动的同时,行走机构会带动机壳移动,机壳移动的时候会带动安装在机壳上的红外线探 测机构进行探测,红外线发射器会发出红外线,并接收红外线,从而将信息传递给PLC控制 器,PLC控制器会控制驱动电机的转动,从而避开障碍物。 与现有技术相比,本发明的有益效果是: 1、通过设置的行走机构能够起到便于沿着电缆沟进行行走,能够将需要进行排放 的电缆放置到电缆沟上的指定位置,通过设置的探测机构,在行走的过程中能够起到便于 探测障碍物的功能,通过设置的旋转机构能够起到便于旋转机构转动的功能,通过设置的 夹紧机构能够起到便于夹紧电缆,当行走机构进行移动的时候,夹紧机构拉动电缆进行同 步移动。通过设置的传动机构来实现调整夹紧机构的位置,从而使得夹紧机构夹取线缆的 位置可进行调节,通过设置的夹紧机构进行夹紧伸缩的同时,还能够进行调整电缆的位置。 通过设置的螺旋线在夹紧机构进行旋转的时候,螺旋线会张开,起到缓冲拉力的功能,使得 螺旋线会被拉伸,通过设置的导线和螺旋线的连接,并且螺旋线能够将导线的电能传递给 液压泵,使得液压泵工作;线管能够起到支撑导线和保护导线的功能,通过设置的蓄电池能 够为该机器人进行供能,保证机器人的正常运行。 2、通过设置的固定销固定在垫板上,第一液压缸固定在垫板上,使得固定销和第 一液压缸的位置不会发生相对移动;当第一液压缸工作的时候,第一液压缸会推动液压杆 进行伸长,当液压杆伸长的时候,液压杆端部的第二活动销被推动,第二活动销带动活动杆 移动,活动杆端部固定的第一活动销被推动,第一活动销带动连接杆围绕固定销发生转动, 当连接杆转动后,使得连接杆的端部远离液压杆,由于连接杆的端部设置有一体成型的夹 杆,固定销位于连接杆和夹杆的连接处,使得夹杆在转动的时候,夹杆两端固定的夹垫会夹 6 CN 111571555 A 说 明 书 4/7 页 住位于夹口内部的电缆,从而使得电缆会被夹紧机构夹紧。 3、通过设置的旋转机构能够起到调节旋转球的位置,从而起到与调节旋转球与夹 紧机构的位置,使得夹紧机构位置被调节,被夹紧机构夹紧的电缆会被调节;通过设置的内 槽和旋转球的配合,使得旋转球始终位于内槽的内部。通过设置的伺服电机的转动带动传 动杆转动,传动杆驱动旋转机构转动,从而起到调节夹紧机构的位置;通过设置的轴承能够 起到支撑传动杆进行传动的功能。通过设置的驱动电机便于驱动机器人进行行走,通过设 置的支座和支板的连接,能够起到稳定支撑行走机构进行移动,使得行走机构在移动的过 程中稳定性较佳。通过设置的探测机构内的红外探测器进行探测感应,从而避开障碍物。 4、本发明具有自动牵拉、排放电缆的机器人,代替传统人工操作,可有效解决人力 资源紧缺的情况。机器人具有可沿电缆沟直线、转弯行驶,可前后左右转向调整;机器人手 臂具备可靠夹持不同粗细电缆功能;机器人手臂可上下调整,以适用不同高度支架排放需 求;机器人手臂可实现伸缩调整,以适用不同宽度支架的电缆排放;机器人一般具备红外或 激光定位系统,可在电缆沟关键部位布置控制点,指引机器人行动轨迹;机器人可通过手持 设备控制其前行、停止、转弯等功能;机器人需为电力驱动,采用电池充电方式。 附图说明 为了便于本领域技术人员理解,下面结合附图对本发明作进一步的说明。 图1为本发明整体立体结构示意图; 图2为本发明行走机构的连接结构示意图; 图3为本发明的传动机构安装示意图; 图4为本发明图3中的A处放大结构示意图; 图5为本发明中的凸块结构示意图; 图6为本发明中的夹紧机构示意图; 图中:1、机壳;11、蓄电池;12、支座;13、线管;14、导线;15、螺旋线;2、夹紧机构; 21、夹垫;22、夹口;23、夹杆;24、固定销;25、连接杆;26、第一活动销;27、活动杆;28、液压 杆;29、垫板;210、第一液压缸;211、第二液压缸;212、卡杆;213、第二活动销;3、旋转机构; 31、旋转球;32、稳定套;33、内槽;34、凸块;4、探测机构;41、红外探测器;42、螺栓;43、固定 板;44、PLC控制器;5、传动机构;51、伺服电机;52、传动杆;53、轴承;6、行走机构;61、支板; 62、履带;63、稳定板;64、主动轮;65、驱动电机;66、从动轮。











