
技术摘要:
本发明涉及智能交通领域,提供一种车道保持控制方法、装置及系统。所述车道保持控制方法包括:获取自动驾驶车辆的当前航向角与目标航向角之间的航向角偏差以及当前横向位置与目标横向位置之间的横向位置偏差;获取自动驾驶车辆的预瞄道路曲率;根据预瞄道路曲率、横向 全部
背景技术:
自动驾驶车辆是通过安装在车身周围的各种传感系统来感知外部环境信息和车 辆本身的信息,然后对输入的信息进行融合、决策(对应融合系统和决策系统),按照不同的 行驶工况自行规划出一条可行驶的安全路线,并通过控制系统实时监测和控制车辆安全行 驶,实现车辆的高度自动化行驶。其中,控制系统作为自动驾驶车辆的核心部分,其性能的 好坏直接决定着车辆的安全行驶和自动化程度标准,因此一直以来是各个公司研发和攻克 的重点和难点。控制系统分为横向控制系统和纵向控制系统两个部分,横向控制系统主要 是通过一系列控制算法实现对自动驾驶车辆的实时转向控制,使车辆按照已知规划的行驶 路线进行车道保持、自动换道、动态避障、掉头和转弯等,纵向控制系统主要是通过对车辆 加、减速度的控制,使自动驾驶车辆能够以一定的安全行驶速度纵向行驶,实现自动启停、 跟随和巡航等。通过对横纵向控制的耦合,使整个控制系统能够同时对车辆的转向和速度 实现自动控制。 在车辆行驶过程中,车道保持功能占据了大部分的行驶时间,也符合安全行驶规 范,故车道保持控制算法在横向控制系统中起到了举足轻重的作用。目前主流的横向控制 算法,特别是其中的车道保持算法,主要是基于车辆动力学和“轨迹跟踪”的思想来设计的。 但是,由于非线性车辆动力学模型和轮胎模型的精度对车辆的操纵稳定性影响很大,很难 针对不同的车型建立准确的模型来反映车辆的真实受力情况;其次复杂的模型使求解维度 增加,同时计算量增大对控制器的运算能力也提出更高要求。另外,基于“轨迹跟踪”的思想 的方案对定位精度要求很高,需要在车上安装高精度定位设备,因此会额外增加硬件成本。
技术实现要素:
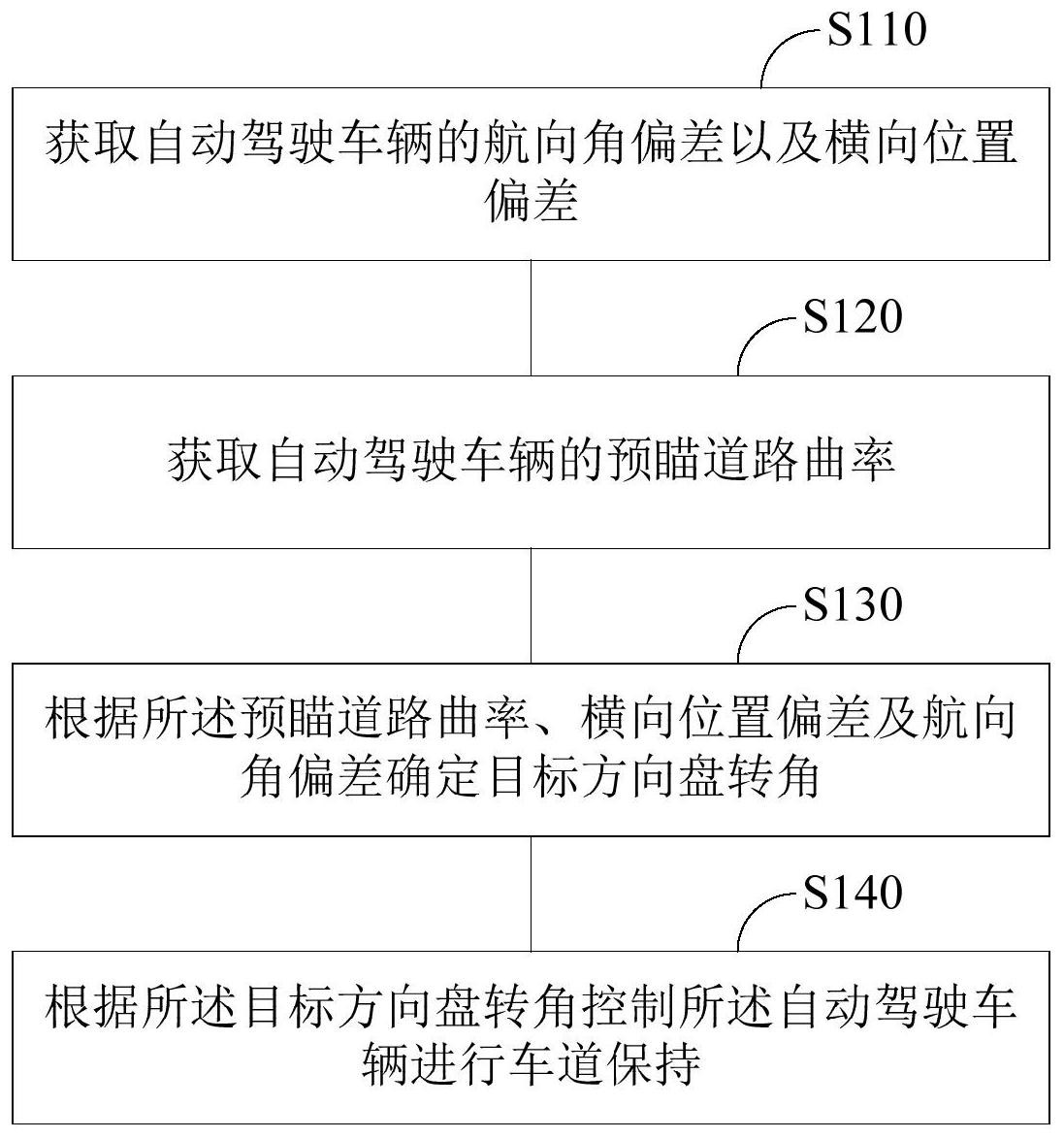
有鉴于此,本发明旨在提出一种车道保持控制方法,以至少部分地解决上述技术 问题。 为达到上述目的,本发明的技术方案是这样实现的: 一种车道保持控制方法,包括:获取自动驾驶车辆的当前航向角与目标航向角之 间的航向角偏差以及所述自动驾驶车辆的当前横向位置与目标横向位置之间的横向位置 偏差;获取自动驾驶车辆的预瞄道路曲率;根据所述预瞄道路曲率、所述横向位置偏差及所 述航向角偏差确定目标方向盘转角,其中,所述目标方向盘转角要求能够使所述横向位置 偏差及所述航向角偏差为0,并使所述预瞄道路曲率达到使所述自动驾驶车辆的实际行驶 轨迹与期望轨迹误差最小的最优道路曲率;以及根据所述目标方向盘转角控制所述自动驾 驶车辆进行车道保持。 进一步的,所述获取自动驾驶车辆的预瞄道路曲率包括:获取所述自动驾驶车辆 的当前车道线方程;获取所述自动驾驶车辆的当前预瞄距离;以及根据所述当前预瞄距离 4 CN 111717189 A 说 明 书 2/10 页 及所述当前车道线方程计算所述预瞄道路曲率。 进一步的,所述根据所述预瞄道路曲率、所述横向位置偏差及所述航向角偏差确 定目标方向盘转角包括:设置第一控制器,该第一控制器输入所述预瞄道路曲率,输出使所 述预瞄道路曲率达到所述最优道路曲率的第一目标方向盘转角;设置第二控制器,该第二 控制器输入所述横向位置偏差,输出使所述横向位置偏差为0的第二目标方向盘转角;设置 第三控制器,该第三控制器输入所述航向角偏差,输出使所述航向角偏差为0的第三目标方 向盘转角;以及根据所述第一目标方向盘转角、所述第二目标方向盘转角及所述第三目标 方向盘转角确定最终的目标方向盘转角。 进一步的,所述车道保持控制方法还包括:在所述第一控制器中,基于阿克曼转向 原理建立所述目标方向盘转角与所述预瞄道路曲率之间的映射关系。 进一步的,所述第二控制器为模糊PID控制器,且根据所述自动驾驶车辆的实时车 速确定所述模糊PID控制器的控制系数。 相对于现有技术,本发明所述的车道保持控制方法具有以下优势:本发明所述的 车道保持控制方法具有很好的控制效果以及很强的鲁棒性,能够使车辆行驶平稳,具有很 好的舒适性,且能够使车辆在安全行驶速度的工况下按照当前车道保持通过直道、弯道等 道路,满足车辆的操纵稳定性和安全性要求。 本发明的另一目的在于提出一种车道保持控制装置,以至少部分地解决上述技术 问题。 为达到上述目的,本发明的技术方案是这样实现的: 一种车道保持控制装置,包括:第一获取模块,用于获取自动驾驶车辆的当前航向 角与目标航向角之间的航向角偏差;第二获取模块,用于获取所述自动驾驶车辆的当前横 向位置与目标横向位置之间的横向位置偏差;第三获取模块,用于获取自动驾驶车辆的预 瞄道路曲率;确定模块,用于根据所述预瞄道路曲率、所述横向位置偏差及所述航向角偏差 确定目标方向盘转角,其中,所述目标方向盘转角要求能够使所述横向位置偏差及所述航 向角偏差为0,并使所述预瞄道路曲率达到使所述自动驾驶车辆的实际行驶轨迹与期望轨 迹误差最小的最优道路曲率;以及控制模块,根据所述目标方向盘转角控制所述自动驾驶 车辆进行车道保持。 进一步的,所述第三获取模块包括:车道线方程获取子模块,用于获取所述自动驾 驶车辆的当前车道线方程;预瞄距离获取子模块,用于获取所述自动驾驶车辆的当前预瞄 距离;以及预瞄曲率获取子模块,用于根据所述当前预瞄距离及所述当前车道线方程计算 所述预瞄道路曲率。 进一步的,所述确定模块包括:第一控制器,用于输入所述预瞄道路曲率,并输出 使所述预瞄道路曲率达到所述最优道路曲率的第一目标方向盘转角;第二控制器,用于输 入所述横向位置偏差,输出使所述横向位置偏差为0的第二目标方向盘转角;第三控制器, 用于输入所述航向角偏差,输出使所述航向角偏差为0的第三目标方向盘转角;以及方向盘 转角确定子模块,用于根据所述第一目标方向盘转角、所述第二目标方向盘转角及所述第 三目标方向盘转角确定最终的目标方向盘转角。 进一步的,在所述第一控制器中,基于阿克曼原理建立目标方向盘转角与预瞄道 路曲率之间的映射关系;和/或所述第二控制器为模糊PID控制器,且根据所述自动驾驶车 5 CN 111717189 A 说 明 书 3/10 页 辆的实时车速确定所述模糊PID控制器的控制系数。 所述车道保持控制装置与上述车道保持控制方法相对于现有技术所具有的优势 相同,在此不再赘述。 本发明的另一目的还在于提出一种机器可读存储介质及一种车道保持控制系统, 以至少部分地解决上述技术问题。 为达到上述目的,本发明的技术方案是这样实现的: 一种机器可读存储介质,该机器可读存储介质上存储有指令,该指令用于使得机 器执行上述的车道保持控制方法。 一种车道保持控制系统,包括:采集装置,用于采集车道线信息;上述的机器可读 存储介质;以及处理器,用于从所述采集装置获取所述车道线信息,并结合所述车道线信息 执行所述机器可读存储介质中存储的指令。 所述机器可读存储介质及所述车道保持控制系统与上述车道保持控制方法相对 于现有技术所具有的优势相同,在此不再赘述。 本发明的其它特征和优点将在随后的











