
技术摘要:
本发明公开了一种多方位脚步动态数据原地采集的方法,利用镜像原理的数控跟随踏板装置实现原地脚步动态数据的采集,设置用于双脚踩踏的数控跟随踏板和双腿运动采集装置,由双腿运动采集装置实时采集抬起脚的移动方向和距离传输至控制系统,控制系统实时控制脚踩的那个 全部
背景技术:
随着随动机器人和VR技术的发展,都需要灵敏的采集人的脚步动态来实现VR虚拟 骨骼或随动机器人的脚步运动,现有脚步动态信号采集方式要么是绑定人体进行脚步滑 移,脚步运动不灵活,要么是采用跑步机,方向固定,要么是采用视觉捕捉,但人的移动范围 大了,就需要安装很多摄像头,运动范围受限。
技术实现要素:
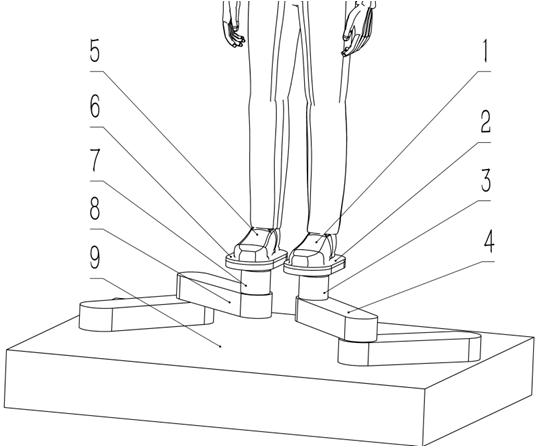
为了克服上述现有技术的不足,本发明提供了一种多方位脚步动态数据原地采集 的方法。 为了实现上述技术目的,本发明采用的技术方案是:一种多方位脚步动态数据原 地采集的方法,利用镜像原理的数控跟随踏板装置实现原地脚步动态数据的采集。 进一步的,所述利用镜像原理的数控跟随踏板装置指:设置用于双脚踩踏的数控 跟随踏板和双腿运动采集装置,由双腿运动采集装置实时采集抬起脚的移动方向和距离传 输至控制系统,控制系统实时控制脚踩的那个跟随踏板,往抬起脚移动方向相反的方向移 动对应的距离,同时转动空载的跟随踏板,实时跟随抬起脚的旋转方向。 更进一步的,所述双腿运动采集装置实时采集抬起脚的移动方向和距离是指:如 果先迈左脚,则实时根据左脚的移动速度和方向控制右脚踏板往相反的方向移动,让左脚 落下来的时候始终落在原地,右脚抬起后,右脚踏板自动回到初始位置,并跟随右脚方位自 动调整方向,左脚踏板实时根据右脚的移动速度和方向往相反方向移动,保证右脚落下来 的时候还是在初始位置。 更进一步的,所述数控跟随踏板装置包括用于双脚踩踏的左右踏板,在踏板下设 置数控转台,转台安装在机械臂上,机械臂固定在装置平台上。 本发明的有益效果:实现了原地采集,且脚步动态数据采集灵活,采集范围无限 大。 附图说明 下面结合附图对本发明进一步说明。 图1为本发明的结构示意图; 图中 1、左脚,2、左踏板,3、左踏板转台,4、左踏板机械臂,5、右脚,6、右脚踏板,7、右踏 板转台,8、右踏板机械臂,9、平台。 3 CN 111580675 A 说 明 书 2/2 页











