
技术摘要:
本发明提供一种双目头戴设备中光学模组的装调测试装置及方法,所述装置包括模拟双眼的第一相机和第二相机、用于校准第一相机和第二相机位置的相机定位机构、用于分别调整第一光学模组和第二光学模组的第一调节机构和第二调节机构以及用于固定双目支架的支架固定装置。 全部
背景技术:
现代计算机技术、显示技术、传感器技术等多种科学技术促进了AR(Augmented Realiy,简称增强现实)和VR(Virtual Reality,简称虚拟现实)体验的系统的开发,VR场景 在多维信息空间上创建了一个虚拟信息环境,能使用户具有身临其境的沉浸感,具有与环 境完善的交互作用能力;AR场景将虚拟信息应用于真实世界,真实的环境和虚拟环境实时 地叠加到同一个画面或空间同时存在。 AR、VR头戴设备包括将图像直接投射至人眼中的显示器件,显示器件距离人眼的 距离一般不到十厘米,通过特定的光学模组的光学处理,该头戴设备可以将图像清晰的投 射在人眼的视网膜上,在用户眼前呈现出虚拟放大图像,用于虚拟虚拟现实、增强现实或混 合现实的应用场景中。 双目头戴设备在使用前应经过瞳距测量,当使用者的眼球位置或屈光系统与双目 头戴设备的光学模组系统不能很好的配合时,需要调整光学模组,使用户可以看到清晰的 图像。现有的双目头戴设备中所使用的瞳距测量装置,一是通过物理调节和软件调节,主要 是调节显示器件与光学模组的光学镜片之间距离来实现,或者通过调节显示区域以适应不 同瞳距的需求,不管哪种调节方法,都需要有一个装调基准位,即将两个光学模组按照一定 的人眼瞳距和屈光度安装在双目支架上,后续在根据不同用户需求进行个性化调节。 现有的双目头戴设备中光学模组基准位的装调主要通过控制双目支架的加工精 度来保证其结构精度,通过组装治具或手工工艺来降低组装过程中引入的位置误差,最后 通过成像检测来剔除双目对位偏差较大的不合格产品,实现双目光学模组的成像品质的管 控。 通常导致光学模组装调偏差的主要因素是零部件的结构公差和组装过程的装配 公差,且这两种误差都是不易消除的;此外,对于镜片一类的光学组件而言,还不可避免的 存在像差,现有的以机械对位为标准的组装和测试无法克服像差因素对最终成像效果的影 响。因此,现有的光学组件装调测试流程和工艺往往导致产品良率偏低,效率低下,产品稳 定性、一致性差,成本飙升,目前的方法并不适用于大规模量产。 现有的双目头戴设备中光学模组基准位的测试主要是两种方式,一种是人眼主观 测试,即让具有同样瞳距和屈光度的测试者佩戴该设备来感知是否满足清晰度、舒适度等 要求,此种方式主观性强,精度不高,一致性差;另一种方式是通过标准化的工业相机取代 人眼,对双目对准精度进行检测,此种方式需要对双目检测的工业相机做初始的位置校准, 主要通过工业相机以外的光学参数进行标定,即工业相机一般需要用到标定测试板、补光 灯等工具,测试时需保证标定测试板均匀曝光,以控制拍摄的图像特征点误差,这种方法标 定过程繁琐,严格依赖外部光学条件和标定工具,标定误差难以量化和控制,效率低下,产 4 CN 111610638 A 说 明 书 2/10 页 品一致性差。
技术实现要素:
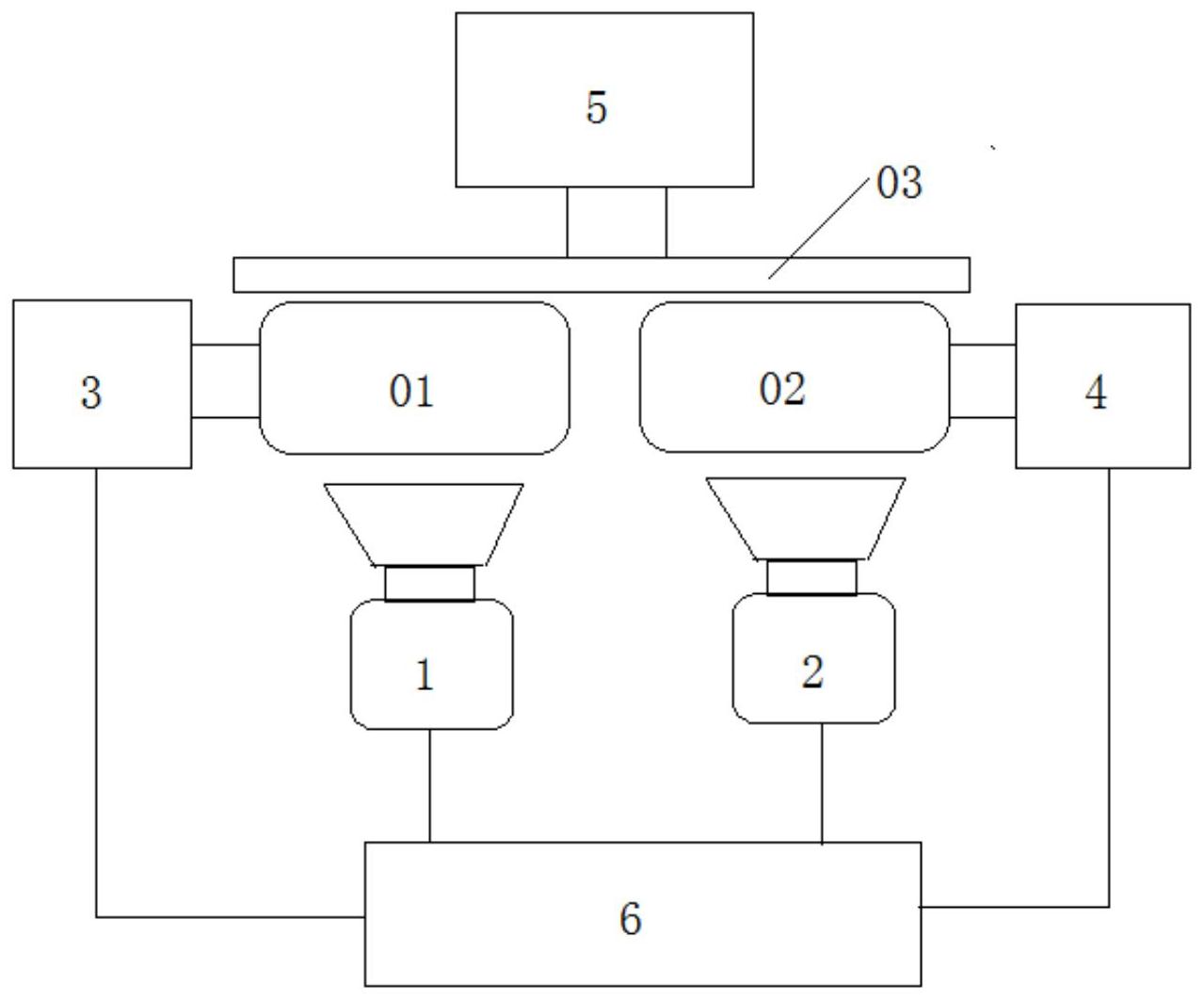
为了解决上述技术问题,本发明提供一种双目头戴设备中光学模组的装调测试装 置,用于将第一光学模组(01)和第二光学模组(02)按照基准位参数固定于双目支架(03) 上,包括: 第一相机(1)和第二相机(2),用于模拟具有基准位参数的人眼结构; 第一调节机构(3)和第二调节机构(4),用于调整第一光学模组(01)和第二光学模 组(02)的旋转位置,所述旋转位置包括相对于目标位置的旋转角度和倾斜量。 进一步的,所述基准位参数包括基准瞳距L1和基准视角β,所述目标位置是指第一 光学模组(01)和第二光学模组(02)分别与模拟具有所述基准位参数的人眼结构的第一相 机(1)和第二相机(2)光轴处于同一直线的位置。 进一步的,所述装调测试装置还包括相机定位机构,用于按照所述基准位参数来 校准第一相机(1)和第二相机(2)的位置。。 进一步的,所述相机定位机构包括双目光轴模拟块,用于模拟基准位参数人眼结 构。 进一步的,所述双目光轴模拟块(7)设置有第一光轴基准孔(71)和第二光轴基准 孔(72),第一光轴基准孔(71)和第二光轴基准孔(72)的中心轴的间距为基准瞳距L1,基准 瞳距L1为55mm-75mm,第一光轴基准孔(71)和第二光轴基准孔(72)的中心轴之间的夹角等 于基准视角β。 进一步的,所述相机定位机构还包括用于照亮第一光轴基准孔(71)和第二光轴基 准孔(72)的边缘的明机构。 优选的,所述照明机构包括环形灯或面板灯中的至少一个; 所述环形灯分别设置在所述第一光轴基准孔(71)和第二光轴基准孔(72)的前侧 入口处,环形灯的内径大于第一光轴基准孔(71)和第二光轴基准孔(72)的内径; 所述面板灯分别设置在所述第一光轴基准孔(71)和第二光轴基准孔(72)的后侧 出口处,面板灯的外径大于第一光轴基准孔(71)和第二光轴基准孔(72)的内径。 进一步的,还包括一支架固定装置(5),用于固定双目支架(03)。 进一步的,还包括一处理器(6),以及连接至处理器的第一相机(1)和第二相机 (2),第一光学模组(01)和第二光学模组(02)分别电连接至处理器(6)。 进一步的,所述第一调节机构(3)和第二调节机构(4)电连接至处理器(6)。 本发明还提供了一种双目头戴设备中光学模组的装调测试方法,采用所述的双目 头戴设备中光学模组的装调测试装置进行操作,包括以下步骤: 步骤S20,采集测试图例经第一光学模组(01)成像的第一测试图像和测试图例经 第二光学模组(02)成像的第二测试图像,并获取第一测试图像相对于基准图像的第一旋转 角αL和第二测试图像相对于基准图像的第二旋转角αR;根据获取的第一旋转角αL、第二旋转 角αR分别调整第一光学模组(01)、第二光学模组(02)的旋转角度; 步骤S30,采集当前位置下的测试图例经第一光学模组(01)成像的第一测试图像 和测试图例经第二光学模组(02)成像的第二测试图像,并分别获取第一测试图像和第二测 5 CN 111610638 A 说 明 书 3/10 页 试图像相对于基准图像的第一倾斜量(xL,yL)和第二倾斜量(xR ,yR);根据获取的第一倾斜 量(xL ,yL)和第二倾斜量(xR ,yR)分别调整第一光学模组(01)和第二光学模组(02)的倾斜 量; 步骤S50,将第一光学模组(01)和第二光学模组(02)固定至双目支架(03)上。 优选地是,所述测试图例为预设图例。 进一步的,所述预设图例是由数行、数列实心圆,或线对形成的方格,或横竖线,或 实心圆与线对方格的组合形成的图形模式,或者棋盘格或二维码(二维码包括直角坐标二 维码、极坐标二维码)所形成的图像模式。 进一步的,步骤S20中,获取第一旋转角和第二旋转角的步骤包括: 以测试图例的中心点为原点、以光学模组的显示器件的显示区域的长度方向为X 轴方向、显示器件的宽度方向为Y轴方向建立坐标系,并将第一测试图像和第二测试图像和 基准图像的映射至同一坐标中; 在基准图像中经原点的直线上选取一个或多个特征点,将基准图像中,任一特征 点与原点的连线为基准线,将第一测试图像或第二测试图像对应的该基准线上的特征点图 像采用最小二乘法拟合成一条直线,并将所有拟合线与对应基准线的夹角的均值作为第一 旋转角αL或第二旋转角αR。 进一步的,步骤S30中,获取第一倾斜量和第二倾斜量的步骤包括: 选取测试图例的特征点,并以测试图例的中心点为原点、以光学模组的显示器件 的显示区域的长度方向为X轴方向、显示器件的宽度方向为Y轴方向建立坐标系,并将第一 测试图像和第二测试图像和基准图像的映射至同一坐标中; 以基准图像的特征点为新原点,以原来的X轴、Y轴方向为新的X轴、Y轴重新建立坐 标系,获取第一测试图像或第二测试图像的同一特征点相对于新原点在X轴和Y轴的倾斜 量,并将获取的所有特征点处的倾斜量均值作为第一倾斜量(xL,yL)或第二倾斜量(xR,yR)。 进一步的,步骤S30和步骤S50之间还包括一步骤S40,所述步骤S40包括: 验证当前位置下,第一光学模组(01)与第二光学模组(02)之间的旋转角差值和倾 斜量差值是否在预定范围内,若在预定范围内,则执行步骤S50;若不在预定范围内,则重复 执行步骤S20至步骤S40。 优选的,还包括步骤S10,通过相机定位机构校准第一相机(1)和第二相机(2)的位 置。 进一步优选地是,步骤S10中,相机定位机构校准第一相机(1)和第二相机(2)的位 置通过第一相机(1)和第二相机(2)分别拍摄双目光轴模拟块(7)的第一光轴基准孔(71)图 像和第二光轴基准孔(72)图像,调整第一相机(1)和第二相机(2)的位置直到第一光轴基准 孔(71)图像和第二光轴基准孔(72)图像均为同心圆为止。 采用以上方案,本发明具有以下技术效果:本发明使用双相机模拟双眼的成像效 果,相机光学参数模拟人眼基准位光学参数,保证成像效果与人眼成像一致,使得光学模组 成像满足人眼舒适度;通过获取的基准位参数制作双目光轴模拟块,用于校准双相机的位 置,适用于批量装调的场合;通过第一相机、第二相机分别采集第一光学模组和第二光学模 组中显示器件显示的测试图例的图像得到第一测试图像和第二测试图像,并获取第一测试 图像和第二测试图像相对于基准位置的测试图例的旋转角度和倾斜量,并由第一调节机构 6 CN 111610638 A 说 明 书 4/10 页 和第二调节机构根据获取的旋转角度和倾斜量分别调整第一光学模组和第二光学模组的 角度,来补偿光学模组其他光学组件的结构公差和组装公差对成像质量造成的不良影响, 保证较好的成像质量,组装的同时完成该光学模组的测试,提高产品良率和成品组装测试 效率,保证了双目光学模组产品的一致性;本发明装调测试装置操作简单,稳定可靠,一致 性好,适应量产需求。 附图说明 图1A是双目光轴模拟块制作原理示意图; 图1B是双目光轴模拟块的结构示意图; 图2是相机定位机构的结构示意图; 图3是相机定位机构的正面视图; 图4是相机拍摄的双目光轴模拟块的图像示例; 图5是本发明装调装置的结构示意图; 图6是用于测试本发明光学模组成像的测试图例一; 图7是处于基准位置的测试图例一与第一光学模组、第二光学模组的测试图例一 的图像在同一坐标轴中的映射关系示意图; 图8是用于测试本发明光学模组成像的测试图例二; 图9是处于基准位置的测试图例二与第一光学模组、第二光学模组的测试图例二 的图像在同一坐标轴中的映射关系示意图; 图10是用于测试本发明光学模组成像的测试图例三; 图11是用于测试本发明光学模组成像的测试图例四。 图中附图标记表示为: 01-第一光学模组,011-第一光学组件,012-第一显示器件; 02-第二光学模组,021-第二光学组件,022-第二显示器件; 03-双目支架;06-左眼;07-右眼;08-投影虚像; 1-第一相机;2-第二相机; 3-第一调节机构;4-第二调节机构;5-支架固定装置;6-处理器; 7-双目光轴模拟块,71-第一光轴基准孔,72-第二光轴基准孔; 8-环形灯;9-面板灯; a-相机光轴中心,b-基准孔入口轮廓,c-基准孔出口轮廓,d-入口轮廓圆心,e-出 口轮廓圆心。











