
技术摘要:
本发明公开了一种基于信标识别与视觉SLAM的AGV定位方法,包含以下步骤:步骤Ⅰ、在AGV实际工作场景中铺设人工信标,通过引入QR码信标提升SLAM定位精度、减小移动过程中产生的累计误差;步骤Ⅱ、训练神经网络模型,用于QR码信标识别;步骤Ⅲ、使用AGV上的双目相机采集图 全部
背景技术:
自动导引运输车(automated guided vehicle,AGV)俗称搬运机器人,出现于20世 纪50年代,是一种自动化、无人驾驶的智能化搬运设备。由于它高效、安全,能够有效地解放 劳动生产力,减轻工人的劳动强度,提高了自动化生产水平。AGV实质上是指装备有自动导 引装置,能够沿着预定的路径运行并完成作业要求的运输车。AGV系统主体是一辆车,可以 根据其现场作业的要求,扩展安装滚筒、机械手、大平台等设备。AGV系统能实现无人驾驶, 可以在很多人类不适合工作的地方甚至是人类无法工作的环境中,代替人类工作,并且具 有抗疲劳、定位准、不惧危险等优势,故在很多领域得到了广泛的应用。 在车间实际生产的整个过程中,仅有5%的时间是用于加工和制造,95%的时间用 于储存、装卸、等待加工和输送。随着人工成本的增加,越来越多的企业采用AGV代替人工。 将AGV应用于自动化生产中,可以实现数据采集、物料运输、作物筛选等工作的自动化作业, 大大提高工作效率。因此,AGV的应用逐渐受到关注。 AGV的导引控制是AGV系统的核心。传统AGV主要使用磁导航方式,需要预先铺设磁 带、磁钉,其灵活性差,因而近年来无线导引方式成为AGV领域研究重点。无线导引方式通过 自然环境信息实现定位,其中视觉SLAM(同步定位与地图构建)作为一种新兴的AGV定位方 法,具有成本低、灵活性好、精度高、可扩展性强等优点,已成为研究人员的研究重点。例如 日本大阪大学 (Osaka University) 的智能机器人研究室(Seifert R. W., Kay M. G., Wilson J . R . Evaluation of AGV routing strategies using hierarchical simulation[J] . International Journal of Production Research . 1998, 36(7): 1961-1976)对视觉导航进行了深入研究,并开发出基于单目视觉导航的移动机器人,该小 车可通过旋转其视觉传感器对周围的环境进行广泛性探测,并由旋转编码器和电位计来获 取移动机器人的定位信息、行驶距离和转角。尽管该方法可以实现地图重用、回环检测以及 重新定位的功能,但是由于其闭环路径较长等问题,导致在检测到闭环前累计误差逐渐增 大,无法满足工业应用场景的需求。为提升SLAM定位精度、减小累积误差,本方法引入QR (Quick Response)码信标进行辅助定位,采用SSD(Single Shot Multi Box Detector)卷 积神经网络模型(Liu W , Anguelov D , Erhan D , et al . SSD: Single Shot MultiBox Detector[J]. 2016.)识别QR码信标,在工作场景中的转角等关键位置的地面铺 设人工信标。相比于自然特征点,QR码信标更易识别,准确度更高,其先验的位置信息可以 有效提升精度,可将定位误差缩小在5CM以内,满足了车间应用场景的需求。此外本方法还 使用了图优化方法,通过基于深度学习方法的QR码识别维护关键帧更新地图。 4 CN 111582123 A 说 明 书 2/5 页
技术实现要素:
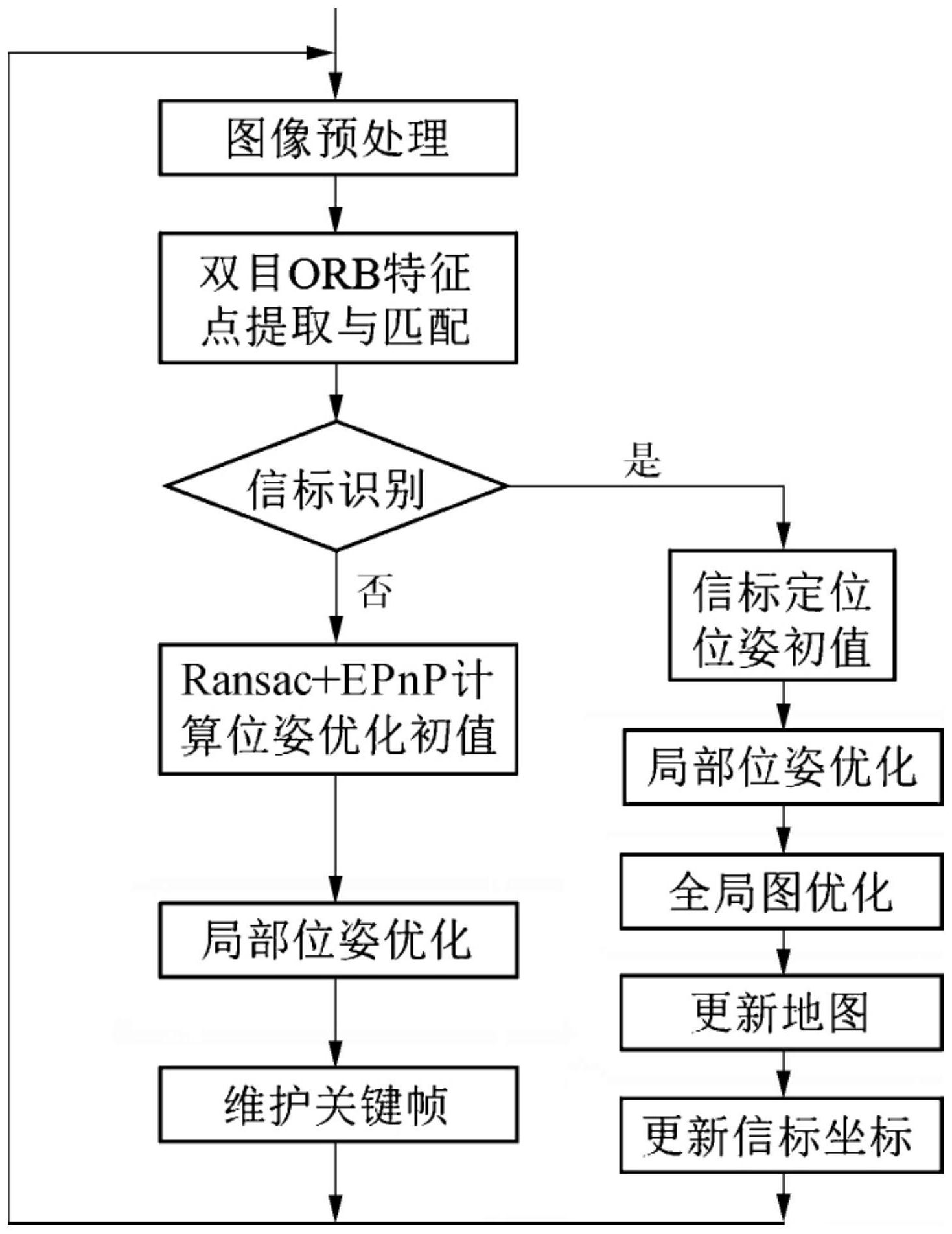
本发明的目的是提供一种基于信标识别与视觉SLAM的AGV定位方法。 本发明至少通过如下技术方案之一实现。 一种基于信标识别与视觉SLAM的AGV定位方法,所述方法包含以下步骤: 步骤Ⅰ、在AGV实际工作场景中铺设人工信标,所述人工信标为QR码信标; 步骤Ⅱ、训练SSD卷积神经网络模型,用于QR码信标识别; 步骤Ⅲ、使用AGV上的双目相机采集图像,将采集的图像进行预处理; 步骤Ⅳ、将经过预处理的图片提取ORB特征,使用异或运算计算ORB特征描述子与相邻 帧特征点描述子的最短汉明距离;当距离小于设定阈值,则视为该投影点和特征点匹配,得 到一组3D-2D点对,获取若干ORB特征点3D-2D点对,用于后续位姿解算和优化; 步骤Ⅴ、对步骤Ⅳ所得图像进行QR码信标识别并优化位姿及地图。 进一步地,步骤Ⅱ包括以下步骤: 步骤a、让AGV在步骤Ⅰ中的工作场景中模拟工作,并采集在此过程中含有QR码的图片作 为SSD卷积神经网络模型的素材;将采集到的图片经过预处理后通过标注软件labelImg进 行人工标注,使用矩形工具将图片中QR码的位置标识出来,labelImg生成相应的位置信息 和类别代码,完成数据集的制作; 步骤b、将步骤a制作的数据集随机取出A%作为训练集剩下的1-A%作为测试集;将训 练集输入SSD卷积神经网络模型进行训练;在训练过程中,使用L2正则化使神经元权重衰 减,达到防止过拟合的效果;SSD卷积神经网络模型对于训练数据的预测误差率是通过预测 训练集的错误样本除以训练集样本总数计算,得到训练集误差曲线,SSD卷积神经网络模型 对于验证数据的误差率是通过预测测试集的错误样本除以测试集样本总数计算,得到测试 集误差曲线; 步骤c、将步骤b得到的训练集误差曲线与测试集误差曲线进行分析,当训练集和测试 集的误差均达到百分之五,停止训练,把训练得到的模型参数保存下来; 步骤d、把步骤c得到的模型参数赋予原始的SSD卷积神经网络模型,得到已训练模型, 并且把测试素材经过预处理后得到若干个测试对象,将若干个测试对象分别输入已训练模 型得到输出结果,最后取若干种结果的平均值,输出QR码的检测结果。 进一步地,步骤a所述的图片预处理包括透视变换与中值滤波。 进一步地,步骤d所述的测试素材预处理包括将图片以一定的角度顺时针连续翻 转,剪裁中央区域的图片信息,形成若干个测试对象。 进一步地,步骤Ⅲ所述的预处理包括对采集的图像进行图像降噪与轮廓提取。 进一步地,步骤Ⅳ是利用基于快速定位(Oriented FAST)特征检测和旋转BRIEF (Rotated BRIEF)描述子的ORB算法进行特征提取与匹配。 进一步地,步骤Ⅴ具体包括以下步骤: 步骤S1、使用步骤Ⅱ的已训练模型进行QR码信标检测,得到QR码定位点相对坐标后,需 要通过QR码信标中所包含的坐标信息得到定位点世界坐标; 步骤S2、位姿初值求解; 若未识别到信标,则基于Ransac(Random Sample Consensus)和EPnP(EPnP: An accurate O(n) solution to the PnP problem)算法,使用3D-2D特征点对计算当前帧位 5 CN 111582123 A 说 明 书 3/5 页 姿初值,再使用图优化进行局部位姿优化,维护关键帧和地图点; 若识别到信标,根据QR码信标中所包含的坐标信息查询到定位点世界坐标以及通过双 目相机计算出的定位点相对坐标;如果由QR码信标识别到的ID号对应的定位点世界坐标与 双目相机计算出的相对坐标两者相匹配,则直接使用最小二乘法优化求得当前帧位姿并将 当前帧位姿作为解算位姿;若由QR码信标识别到的ID号对应的定位点世界坐标与双目相机 计算出的相对坐标两者不相匹配,则通过特征点匹配解算位姿; 步骤S3、局部位姿优化与全局地图优化;根据图优化,以顶点表示优化对象,用边表示 目标函数,将优化问题用图模型表述为非线性最小二乘问题;若当前帧未识别到人工信标, 则在维护关键帧和地图点后结束此次循环,等待下一帧输入;若当前帧识别到QR码信标,则 需继续进行全局图优化;在全局优化的图模型中,以关键帧、地图点以及信标定位点作为顶 点,连接其中有投影关系的顶点;以重投影误差和位姿变换误差作为优化边,优化关键帧位 姿和地图点空间坐标。 进一步地,步骤S2中,若未识别到信标,位姿初值求解包括以下步骤: 步骤21、通过PnP(Perspective-n-point)求解位姿初值,求解方法包括直接线性变换 (DLT) 、3对匹配点法(P3P)、EPnP(EPnP: An accurate O(n) solution to the PnP problem)、UPnP及非线性优化方法; 步骤22、根据控制点坐标求得各特征点在相机坐标系下的坐标,由此获得点云在两个 坐标系下的对应坐标; 步骤 23、通过最小二乘优化变换误差和,求得当前帧的位姿。 进一步地,步骤S2中,若识别到信标,通过双目相机计算定位点的相对坐标包括以 下步骤: 步骤24、通过PnP求解位姿初值,求解方法包括直接线性变换(DLT) 、3对匹配点法 (P3P)、EPnP、UPnP及非线性优化方法; 步骤25、根据控制点坐标求得各特征点在相机坐标系下的坐标,由此获得点云在两个 坐标系下的对应坐标,对两个坐标系下对应坐标进行坐标系变换得到定位点相对坐标。 与现有的技术相比,本发明的有益效如下: 本发明可以在识别到QR码信标后消除当前累计误差从而实现在闭环检测前较大幅度 缩小累计误差,更加适合AGV的车间应用场景;本发明使用了用RANSAC(Random Sample Consensus)算法进行优化,减小误匹配点的影响;本发明使用了SSD卷积神经网络进行信标 识别,在保证实时性的前提下提高了信标识别的精度。 附图说明 图1是本实施例一种基于信标识别与视觉SLAM的AGV定位方法的流程图; 图2是实施例信标识别流程图; 图3是本实施例所使用的QR码信标图。











