
技术摘要:
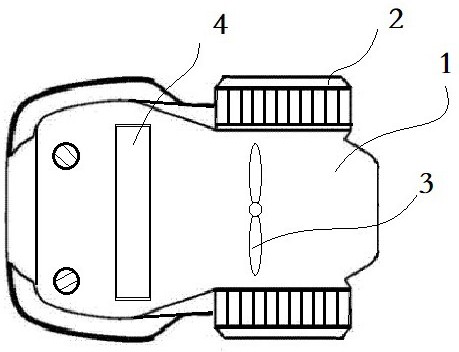
本发明公开一种基于红外检测阵列的草况识别方法,包括底部安装割草装置的运动平台,所述的运动平台内部设置处理器,所述的运动平台底部安装条形的红外检测阵列,所述的红外检测阵列覆盖车身宽度,并且高于所述的割草装置;所述的红外检测阵列设置红外发射行和红外接收 全部
背景技术:
红外线是波长介于微波与可见光之间的电磁波,波长在1mm到760纳米之间,比红 光长的非可见光。红外线具有肉眼不可见,并且穿透能力强的优点,因此在我们的生产和生 活中得到广泛的应用。比如,我们日常生活中的遥控器,生产设备上的红外接近开关,近距 离的数据传输,进行障碍物检测的红外测距传感器以及进行流量计数的红外开关。 随着人们生活节奏的加快,越来越需要智能割草机器人来完成草坪的日常维护, 避免了耗时而辛苦的工作。而目前智能割草机器人,工作效率还不高,因为机器人还不能识 别哪里的草地需要割,哪里的草地不需要割,哪里的草地茂盛,哪里的草地已经割过,采用 的工作路径是基于随机方式产生的,会产生很多重复的路径。如果智能割草机器人能够根 据草地的情况进行路径规划,将大大提高工作效率。
技术实现要素:
针对上述问题,本专利将红外检测技术引入割草机器人技术领域,提供一种基于 红外检测阵列的草况识别方法,运动平台在移动过程中,识别草地的茂盛程度,为高效路径 规划提供信息。 本专利解决其技术问题所采用的技术方案是: 基于红外检测阵列的草况识别方法,包括底部安装割草装置的运动平台,所述的运动 平台内部设置处理器,所述的运动平台底部安装条形的红外检测阵列,所述的红外检测阵 列覆盖车身宽度,并且高于所述的割草装置;所述的红外检测阵列在上下两端设置红外发 射行和红外接收行,左右两端设置红外发射列和红外接收列;所述的红外发射行设置至少 一个红外发射管和行发射光栅,所述的红外接收行设置至少一个红外接收管和行接收光 栅,设置行扫描电路与所述的红外发射行连接,设置行接收电路与所述的红外接收行连接; 所述的红外发射列设置至少一个红外发射管和列发射光栅,所述的红外接收列设置至少一 个红外接收管和列接收光栅,设置列扫描电路与所述的红外发射列连接,设置列接收电路 与所述的红外接收列连;所述的行扫描电路,列扫描电路,行接收电路和列接收电路与所述 的处理器连接;所述的处理器内部设置草况识别算法,所述的草况识别算法包括以下步骤: (1)、设置二维数组f(x,y)存储所述的红外检测阵列的输出数据,数据元素初始化为 零,其中x=1~M,y=1~N; (2)、行扫描:所述的处理器通过所述的行扫描电路逐次驱动所述的红外发射行:当第i 个红外发射管工作,如果所述的红外接收行的第i个红外接收管不能输出有效信号,执行步 骤(3);行扫描结束,执行步骤(5); (3)列扫描:所述的处理器通过所述的列扫描电路逐次驱动所述的红外发射列:当第j 个红外发射管工作,如果所述的红外接收列的第j个红外接收管不能输出有效信号,则f(i, 3 CN 111553273 A 说 明 书 2/3 页 j)=1,否则f(i,j)=0;列扫描结束,返回步骤(2); (4)计算数组f(x,y)的元素和sum= ,如果元素和sum











