
技术摘要:
本发明属于航空技术领域,提供了一种精确控制飞机水平航迹,使飞机按预设圆航迹自动飞行的控制方法。具体为一种飞机圆航迹自动飞行控制方法。该方法在现有方法基础上,克服了现有控制方法受系统的控制精度、风、侧滑等的影响,使飞机产生稳定航迹偏差的问题,提供了一 全部
背景技术:
在飞行过程中,根据使用需要,有时需控制飞机长时间以某固定地理位置为圆心, 按标准圆水平轨迹自动飞行(以下均简称为圆航迹自动飞行),即需控制飞机使其水平航迹 为标准圆。常用的飞机水平航迹自动控制方法是根据飞机导航系统提供的飞机实时位置坐 标、飞机实时速度矢量等信息,结合预设的水平航迹坐标解析方程,解算出航迹偏差和航迹 偏差速率,然后计算出飞机所需的转弯程度——坡度的大小,利用自动飞行控制系统作为 执行机构,控制飞机按计算的坡度转弯,从而自动跟随预设的水平航迹。在圆航迹自动飞行 中,飞机需始终保持一定坡度转弯,同时由于系统的控制精度、风、侧滑等的影响,上述常用 的控制方法易使飞机产生稳定的航迹偏差,飞机真实水平航迹为在预设圆轨迹内侧(或外 侧)的同心圆,无法精确控制飞机按预设的圆航迹自动飞行。 根据自动控制理论,为了消除系统稳态误差,可以在系统中引入积分环节,然而在 飞机保持圆航迹自动飞行过程中,飞机始终处于转弯机动状态,要求自动飞行控制系统能 快速跟随操纵指令,飞机水平航迹才能保持在以预设圆轨迹为中心线、控制精度为宽度的 误差环带内。而引入积分环节会降低自动飞行控制系统的对操纵指令的跟随响应速度,因 此,不能采用直接对航迹偏差积分的方法来消除飞机产生的稳定的航迹偏差。
技术实现要素:
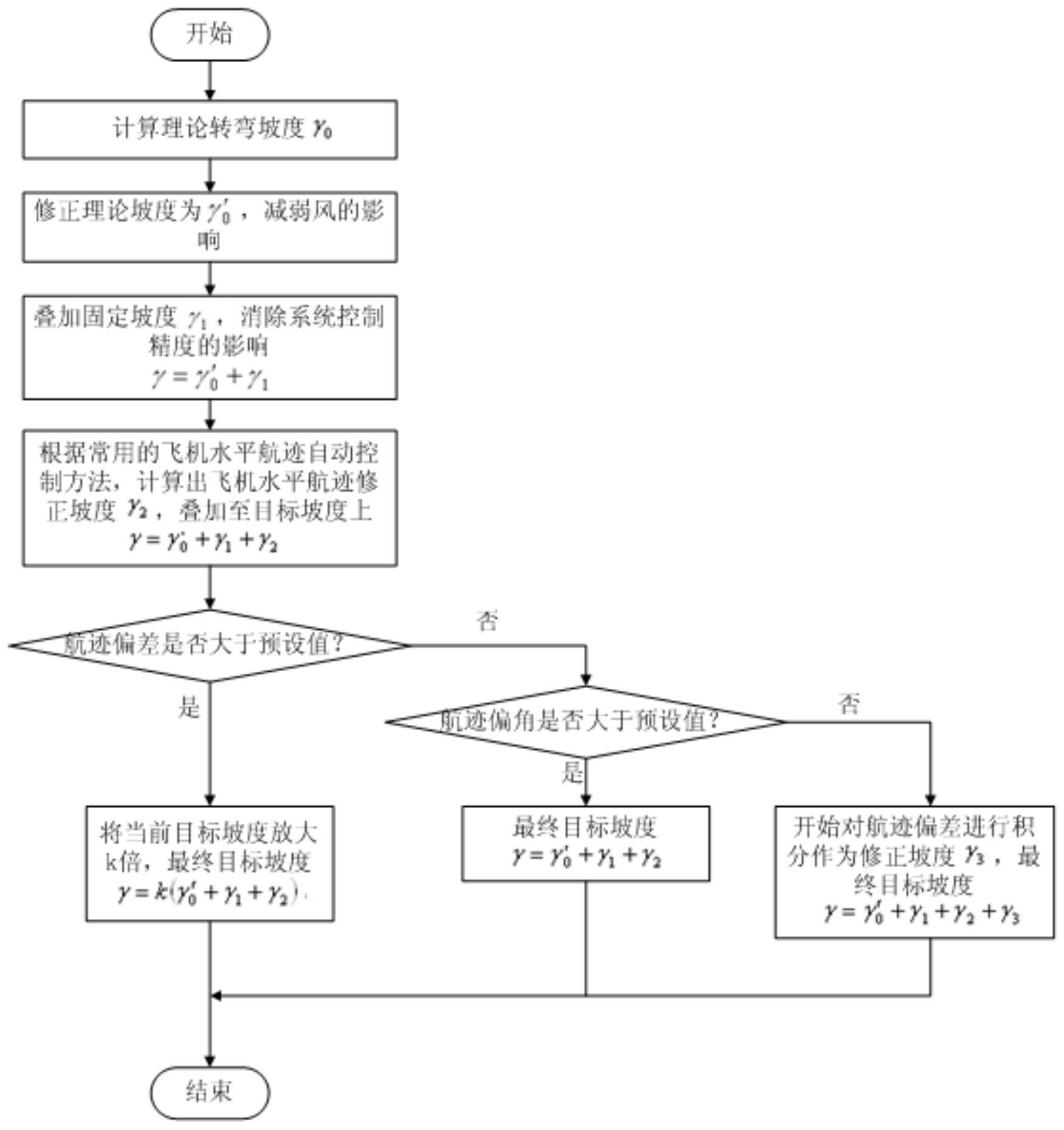
本发明克服了现有常用控制方法中的缺点,消除了现有控制方法产生的稳定航迹 偏差,提供了一种精确控制飞机水平航迹,使飞机按预设圆航迹自动飞行的控制方法。 技术方案 为了解决上述技术问题,本发明是通过以下技术方案实现的: 一种飞机圆航迹自动飞行控制方法 1、根据期望的圆航迹半径,利用飞机转弯简化动力学分析模型,计算出飞机所需 的理论转弯坡度,作为自动飞行控制系统控制飞机转弯的基准坡度。 2、根据飞机预设的使用环境,结合飞机气动特性分析以及工程经验对基准坡度进 行修订,以减弱风对控制结果的影响。 3、在上述基准坡度上,叠加一个固定角度,用以消除系统的控制精度的影响。 4、根据常用的飞机水平航迹自动控制方法,建立带自动飞行控制系统的飞机水平 运动响应数学简化模型,设计基于常用的飞机水平航迹自动控制方法的修正坡度解算关 系,利用航迹偏差和航迹偏差速率,计算出飞机水平航迹修正坡度。 最终将按上述步骤计算的基准坡度、各叠加的固定角度、修正坡度相加,作为自动 飞行控制系统的目标坡度,控制飞机自动跟随该目标坡度飞行,实现飞机水平轨迹为标准 圆轨迹的自动控制。 3 CN 111580552 A 说 明 书 2/3 页 在4中计算飞机水平航迹修正坡度时,将飞机的整个圆航迹飞行过程划分为若干 阶段, 不同的阶段设计不同的修正坡度计算方法。 在圆航迹飞行过程初期,以飞机航迹偏差来划分阶段,当航迹偏差大于一个设定 的固定值时,修正坡度按常用的飞机水平航迹自动控制方法计算, 当航迹偏差不大于该设定的固定值时,按常用的飞机水平航迹自动控制方法计算 出理论修正坡度后,人为地按设计的函数关系放大该理论修正坡度作为实际修正坡度; 在圆航迹飞行过程进入误差环带内后,以飞机水平速度方向与飞机实时位置在圆 轨迹径向投影点处的切线方向的夹角(航迹偏角)为判断依据, 当航迹偏角小于一个预设的固定值时,开始对飞机水平航迹偏差进行积分,并将 得到的积分值按设计的函数关系进行计算,叠加在按常用的飞机水平航迹自动控制方法计 算出理论修正坡度中。 技术效果 在不额外增加参数的情况下,利用已有的参数,改造现有技术,克服了现有控制方 法受系统的控制精度、风、侧滑等的影响,使飞机产生稳定航迹偏差的问题,提供了一种精 确控制飞机水平航迹,使飞机按预设圆航迹自动飞行的控制方法,该方法简单、可靠,改动 小,操作方便,其分阶段设计修正坡度,适时引入积分环节的特征具有很强的普适性,可广 泛应用于其余水平航迹自动飞行控制中。 附图说明 图1是本方法的实施流程图 图2是飞机转弯的一种简化动力学分析 图3是常用的飞机水平航迹自动控制方法示意











