
技术摘要:
复杂月面接近段实现自主障碍规避的着陆区选取方法,解决了现有在月球软着陆自主障碍规避与着陆区选取时信息利用率不够高的问题,属于月球软着陆技术领域。所述方法包括:S1、获取在接近段测量的月球表面光学图像,确定待选着陆区;S2、在待选着陆区内提取环形山的形状 全部
背景技术:
从20世纪60年代开始至今,美国、苏联、欧洲、日本、中国、印度等国家和地区发射 了多个月球探测器。对于早期月面探测任务,由于缺乏自主避障能力,通常会在任务实施前 规划较为宽阔和平坦处作为任务着陆区,如Luna系列探测器和勘探者系列探测器;或者依 靠人工操纵实现避障功能,如Apollo系列探测器。为提高着陆成功率,需要月球探测器具有 自主选择着陆点的能力。 21世纪以来,美国提出一种基于激光雷达的无人灵巧着陆自主软着陆避障技术, 但根据已有资料,该技术还未得到成功应用。在“嫦娥”三号和四号飞行器的软着陆任务中, 采用粗精结合的避障算法进行自主障碍规避与着陆区选取。在接近段(2400m-100m)主要进 行“粗避障”,根据被动探测获得的光学信息基础上重新设定制导目标并规划着陆区域;在 悬停、避障及缓速下降段(100m-2m),通过采用激光雷达、激光高度计等敏感器得到月面高 精度地形信息,选取最优着陆点实现“精避障”。 月球软着陆自主障碍规避与着陆区选取技术的难点在于任务执行前缺乏月面高 精度高程图(Digital Elevation Model,DEM)信息,而当探测器在着陆末段获得较精确的 月面高程信息时已无法完成较大的避障机动。目前,基于接近段获得的被动光学探测信息, 障碍识别与安全着陆区选取主要通过分析环形山、石块等障碍的明暗、阴影灰度特征实现, 信息利用率不够高。
技术实现要素:
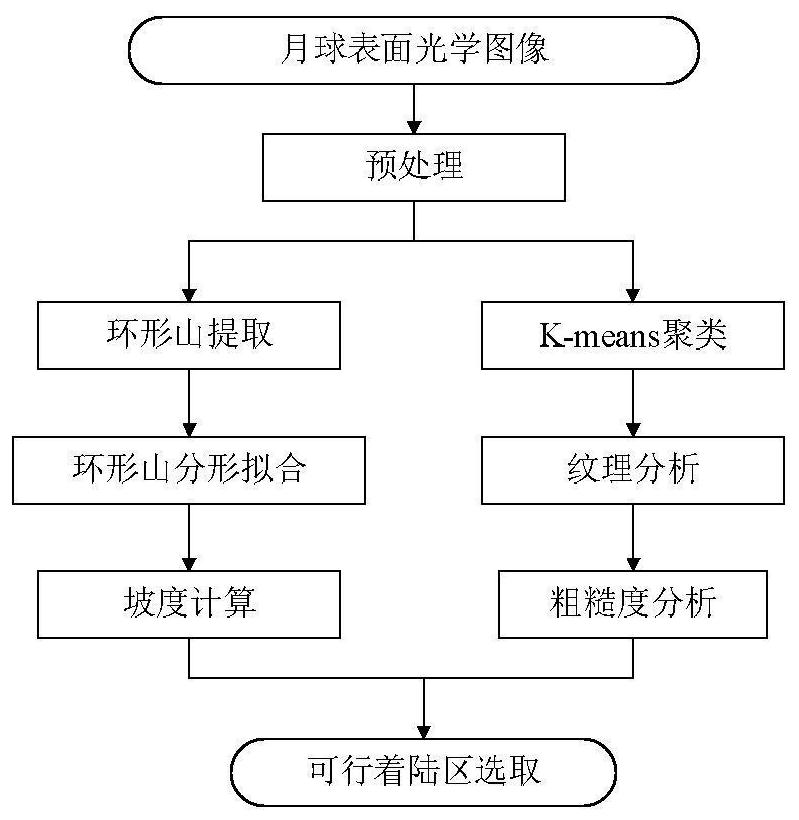
针对现有在月球软着陆自主障碍规避与着陆区选取时信息利用率不够高的问题, 本发明提供一种在充分分析月面环形山形状特征基础上,对接近段待选着陆区进行粗略重 建,从二维图像恢复出三维信息,提升信息利用率的复杂月面接近段实现自主障碍规避的 着陆区选取方法。 本发明的一种复杂月面接近段实现自主障碍规避的着陆区选取方法,所述方法包 括: S1、获取在接近段测量的月球表面光学图像,确定待选着陆区; S2、在待选着陆区内提取环形山的形状信息,再结合分形布朗运动FBM对待选着陆 区内的环形山重建,计算环形山内各点坡度,根据设定的安全坡度,得到坡度小于安全坡度 的区域作为可降落区; S3、对待选着陆区进行纹理分析,评估粗糙度,得到待选着陆区的平坦的地块; S4、结合可降落区及平坦地块选出最优可行着陆区。 作为优选,所述S2包括: 3 CN 111737882 A 说 明 书 2/9 页 S21、提取出待选着陆区的环形山进行圆拟合,并计算出拟合环形山的坑唇间直径 D; S22、根据公式一和公式二获取环形山的深度H和坑唇高度Hr: H=0.196D1.01 公式一 H =0.036D1.014r 公式二 S23、根据环形山的坑唇间直径D、深度H和坑唇高度Hr,获取坑唇外边缘等效半径 Dr: S24、将环形山近似为球面,计算出环形山等效球面半径R: S25、根据环形山的坑唇间直径D、深度H、坑唇高度Hr、坑唇外边缘等效半径Dr和等 效球面半径R确定环形山的形状,应用基于分形布朗运动FBM对环形山进行叠加,形成环形 山仿真点; S26、根据环形山仿真点,计算环形山内各点坡度ψ; S27、根据设定的安全坡度ψ*,得到坡度小于安全坡度的区域作为可降落区。 作为优选,安全坡度ψ*=12。 作为优选,所述S3中: S31、将待选着陆区月球表面光学图像按照灰度特征不同分为N个类别的月面图像 纹理,所述灰度特征用于表示平坦地块的特征; S32、应用K均值聚类方法对待选着陆区内每类月面图像纹理进行纹理分析,获得 聚类结果,根据聚类结果确定平坦地块。 作为优选,所述N为6,6个类别分别为平坦月面、粗糙月面、大环形山阴面、大环形 山阳面、小环形山阴面和小环形山阳面。 本发明的有益效果:本发明针对探测器光学探测得到的灰度图像,首先对探测得 到的环形山形状特征和分布特征进行建模,计算出待选着陆区内各点坡度;随后采用基于 K-means聚类的图像纹理分析方法评估待选着陆区的粗糙度;综合考虑坡度、粗糙度,在待 选着陆区内进行可行着陆区选取,本发明具体三个优点:(1)提升被动光学探测信息的利用 率,提高自主导航和障碍识别的精度;(2)可恢复“看不见”地区的障碍结构,显著提升了月 球探测器选取着陆区的自主性;(3)为“嫦娥”系列探测器精避障系统提供更准确可靠的初 始信息。本申请进行了仿真实验,实验表明,本发明提出的方法能够准确反映月面图像中环 形山和月表的形状特征,并能有效选取出适合着陆的区域,具有良好的工程适应性。 附图说明 图1为本发明的流程示意图; 图2为环形山提取及圆拟合; 图3为环形山等效剖面图; 图4为环形山三维形状拟合; 4 CN 111737882 A 说 明 书 3/9 页 图5为环形山仿真点云; 图6为“嫦娥”一号图像样本; 图7为环形山内各点等效坡度; 图8为纹理分析结果; 图9为轮廓值分布; 图10为不同类别数轮廓值结果; 图11为膨胀处理后的平坦月面纹理; 图12为“嫦娥”探测器拍摄图像; 图13为待选着陆区域区(A区); 图14为分形布朗运动坡度估计; 图15为可行着陆区选取结果(A区); 图16为待选着陆区(B区); 图17为可行着陆区选取结果(C区)。











