
技术摘要:
示例性实施例提供了一种具有改善敏捷性的飞行器。该飞行器包括主体、至少两个机翼组件、至少两个电机、和控制器。机翼组件附接到主体上。每个电机以倾斜角度倾斜一个机翼组件。控制器与电机连接,用于控制机翼组件的倾斜角度。每个机翼组件还包括机翼、动力装置、和由 全部
背景技术:
重于空气的飞行器或重飞行器的特征在于具有一个或多个机翼和中央机身。机身 通常还带有用于稳定和控制的机尾或尾翼,以及用于起飞和降落的起落架。发动机可位于 机身或机翼上。固定翼飞行器上的机翼是牢固地附接在机身上并在飞行器两侧延伸的静态 平面。当飞行器向前飞行时,空气流过机翼,而机翼的形状能够产生升力。旋翼飞行器上的 机翼附接到旋转轴上,以在整个飞行过程中提供升力,例如有直升机、自转旋翼机、和旋翼 式螺旋桨飞机。 为了满足不断发展的技术需求,期望获得改良飞行性能的新型飞行器。
技术实现要素:
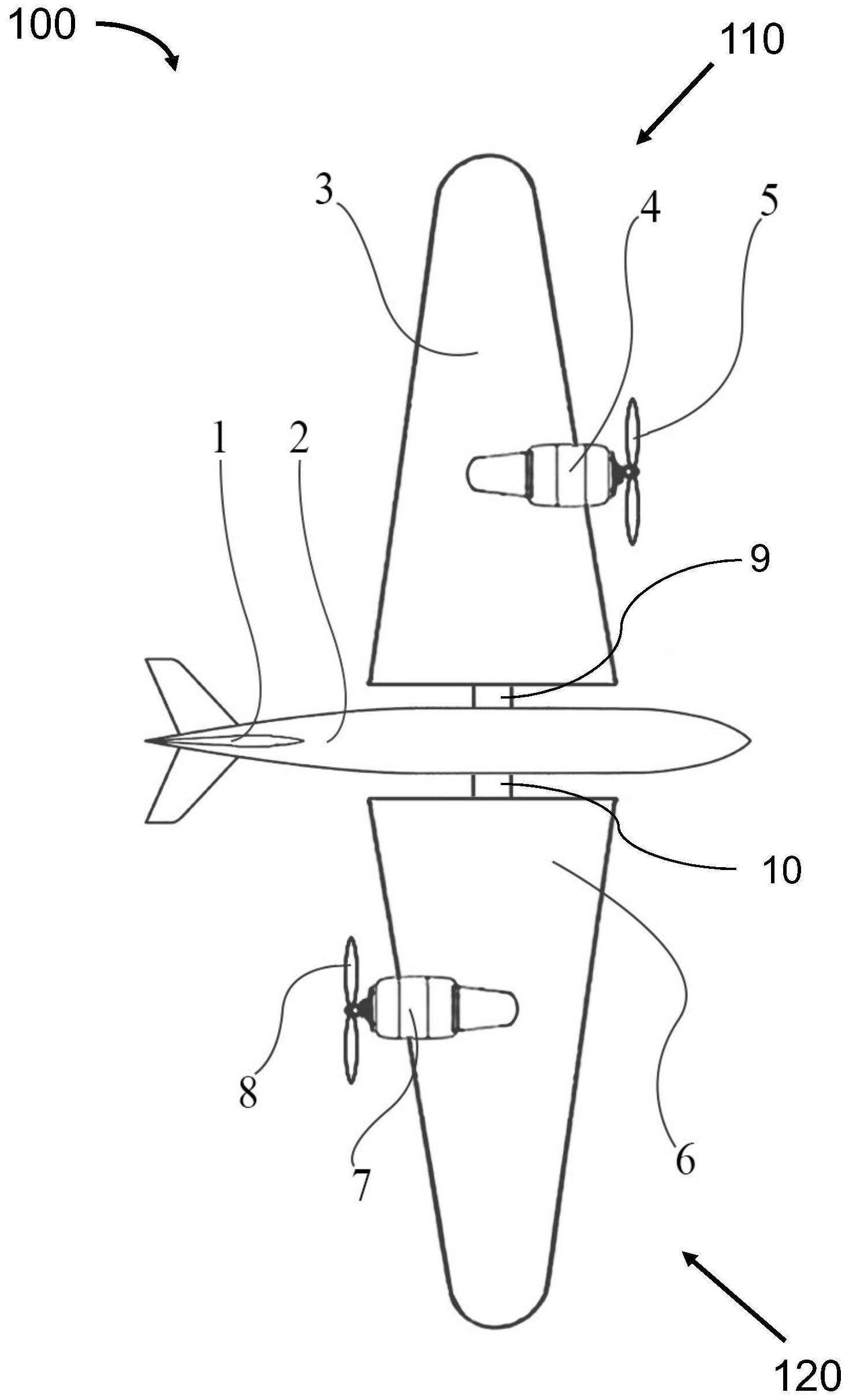
一个示例性实施例提供了一种具有改善的敏捷性的飞行器。该飞行器包括主体、 两个机翼组件、两个电机、以及控制器。机翼组件附接在主体侧面。每个机翼组件还包括:机 翼,其从主体侧面延伸并且可围绕垂直于主体侧面的轴线倾斜;一个动力装置,例如电机或 发动机,其配置在机翼上;以及一个螺旋桨,其由动力装置驱动以提供推进力。螺旋桨的旋 转平面垂直于机翼平面。每个电机使一个机翼组件以倾斜角度倾斜。控制器与电机连接,并 向电机提供控制信号以控制机翼组件的倾斜角度。当飞行器飞行时,每个机翼组件以各自 的倾斜角度倾斜,从而使飞行器能够以改善的敏捷性飞行。 另一个示例性实施例提供了一种用于控制飞行器姿态的方法。该飞行器包括控制 器和两个机翼组件。机翼组件从主体侧面延伸并且由两个电机分别驱动。该方法包括以下 步骤:由控制器根据多个传感器的测量值确定飞行器的当前飞行姿态;由控制器根据当前 飞行姿态和期望飞行姿态计算第一机翼组件的第一倾斜角度;由控制器根据当前的飞行姿 态和期望的飞行姿态计算第二机翼组件的第二倾斜角度;由第一电机向第一机翼组件提供 第一扭矩以使第一机翼组件以第一倾斜角度倾斜;由第二电机向第二机翼组件提供第二扭 矩以使第二机翼组件以第二倾斜角度倾斜;通过同时并分别使第一机翼组件以第一倾斜角 度倾斜和使第二机翼组件以第二倾斜角度倾斜来控制飞行器的姿态。 本文还描述了其他示例性实施例。 附图说明 图1示出了根据一个示例性实施例的偏转翼飞行器的俯视图。 图2示出了根据一个示例性实施例的偏转翼飞行器控制系统的框图。 图3-5显示了根据示例性实施例的偏转翼飞行器的不同飞行姿态。 图6A和6B示出了根据一个示例性实施例的向右转动的偏转翼飞行器的侧视图和 俯视图。 4 CN 111605708 A 说 明 书 2/7 页 图7A和7B示出了根据一个示例性实施例的向左转动的偏转翼飞行器的侧视图和 俯视图。 图8示出了根据一个示例性实施例的向右转向的偏转翼飞行器的后视图。 图9示出了根据一个示例性实施例的向左转向的偏转翼飞行器的后视图。 图10示出了根据一个示例性实施例的围绕主体旋转的飞行器的后视图。 图11示出了根据一个示例性实施例的悬停的翻转的偏转翼飞行器的后视图。 图12示出了根据一个示例性实施例的顺时针转动的偏转翼飞行器的俯视图。 图13示出了根据一个示例性实施例的用于控制偏转翼飞行器的飞行姿态的方法。











