
技术摘要:
本发明涉及无人驾驶、自动驾驶及无人车技术领域,本发明提供一种无人车控制方法、控制系统及无人车,其中无人车控制方法,包括:当无人车需要上电时,若无人车接收到上电请求触发信号,则控制无人车自动完成上电操作步骤;当无人车需要下电时,若无人车接收到下电请求 全部
背景技术:
随着科技的进步,车辆越来越多的走进了人们的生活,其中,电动无 人车技术越 来越受重视,在服务行业应用越来越多,比如物流、餐饮等行 业。 无人车的上下电控制是研究的热点,目前无人车大多数采用手持遥控 器进行上 下电,需要经过以下步骤:首先打开无人车的总开关,再按下上 下电开关,然后打开遥控器 的开关,通过遥控器上的按钮,依次完成高压 上电和自动驾驶上电,现有技术还存在如下 不足之处,一方面,操作步骤 多,操作犯错的几率比较大,操作安全性差;另一方面,对操作 人员的技 能要求比较高,需要经过系统的培训,导致成本高。
技术实现要素:
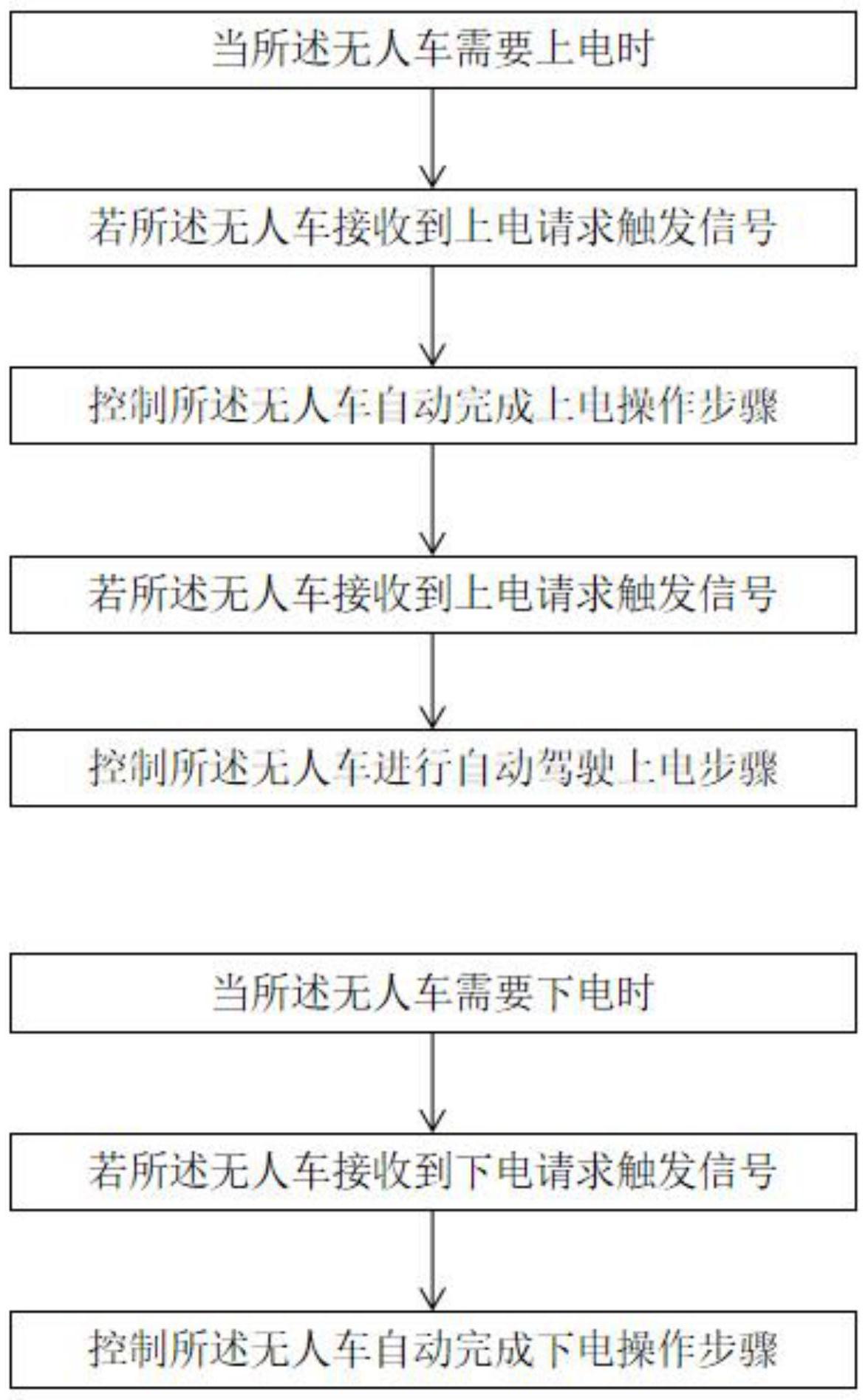
为解决上述技术问题,本发明的第一方面提供一种无人车控制方法, 所述方法包 括: 当所述无人车需要上电时,若所述无人车接收到上电请求触发信号, 则控制所述 无人车自动完成上电操作步骤; 当所述无人车需要下电时,若所述无人车接收到下电请求触发信号, 则控制所述 无人车自动完成下电操作步骤; 所述上电操作步骤包括:先进行低压上电,判断当所述低压上电完成 之后,进行 高压上电; 所述下电操作步骤包括:先进行高压下电,判断当所述高压下电完成 之后,进行 低压下电。 本发明通过在无人车接收到上电请求触发信号或下电请求触发信号 时,自动完 成上电或下电操作,一方面,减少无人车上电或下电的操作步 骤,提高操作的安全性;另一 方面,对操作人员的技能要求比较低,提高 无人车操作的舒适性。 进一步地,所述无人车自动完成上电操作步骤之后,若所述无人车再 次接收到所 述上电请求触发信号,则控制所述无人车进行自动驾驶上电步 骤。 本发明在无人车完成高压上电之后,若无人车接收到上电请求信号, 控制无人车 进行自动驾驶上电,从而使无人车从低压上电到高压上电再到 自动驾驶上电,只需执行两 次上电请求触发信号,通过自动判断完成,减 少了上电操作步骤,操作方便且不容易出错, 提高了无人车操作的安全性。 进一步地,所述上电请求触发信号或所述下电请求触发信号的产生方 式包括:一 个按键触发产生或一个远程报文信号触发产生。 本发明通过采用一个按键或者一个远程报文信号作为上下电的触发信 号,使得 4 CN 111605434 A 说 明 书 2/6 页 操作简单,不容易出错。 进一步地,所述进行低压上电的步骤具体包括:闭合自锁继电器和IG 继电器。 进一步地,判断当所述IG继电器闭合成功之后,所述高压上电的步骤 具体包括: 闭合电池内部继电器; 当所述无人车接收到所述电池内部继电器闭合的信息后,则闭合预充 继电器; 当所述无人车接收到所述预充继电器闭合的信息后,进一步判断电池 的输出端 与电机的输入端之间的电压是否小于第一预设电压值,若为是, 则闭合主正继电器,并断 开所述预充继电器; 当所述无人车接收到所述主正继电器闭合以及所述预充继电器断开的 的信息 后,进一步判断所述无人车接收到的所述电机的状态是否为准备就 绪状态,若为是,则所 述无人车的所述高压上电完成。 进一步地,当所述无人车接收到所述主正继电器闭合以及所述预充继 电器断开 的的信息后的步骤还包括:判断所述无人车接收到的所述电池的 输出端与电机的输入端 之间的电压是否小于所述第一预设电压值,若为是, 则所述无人车进入等待高压完成步 骤; 进一步判断所述无人车接收到所述电机的状态是否为准备就绪状态, 若为是,则 所述无人车的所述高压上电完成,反之,所述无人车保持所述 等待高压完成步骤。 本发明通过在闭合主正继电器之后,增加判断电池的输出端与电机的 输入端之 间的电压是否满足一定条件,从而保证无人车高压上电判断的准 确性和有效性。 进一步地,所述无人车进入等待高压完成步骤还包括:进一步判断所 述无人车是 否接收到充电枪连接信号,若为是,则所述无人车进入充电步 骤,反之,所述无人车保持所 述等待高压步骤。 本发明通过在闭合主正继电器后,判断充电枪是否有连接信号,从而 保证无人车 的安全性。 进一步地,所述无人车进行自动驾驶上电步骤具体包括:闭合自动驾 驶继电器; 当所述无人车接收到所述自动驾驶继电器闭合的信息后,所述 无人车的所述自动驾驶上 电完成。 进一步地,当所述无人车的所述自动驾驶上电完成之后,若所述无人 车接收到到 所述下电请求信号时,控制所述无人车自动完成所述下电操作 步骤。 本发明通过在无人车自动驾驶上电完成,正常行驶过程中,当无人车 接收到下电 请求触发信号时,自动完成下电操作,一方面,减少无人车下 电的操作步骤,提高操作的安 全性;另一方面,对操作人员的技能要求比 较低,提高无人车操作的舒适性。 进一步地,所述下电操作步骤具体包括: 解除电机的使能指令; 当所述无人车接收到当前的电流小于预设的电流值时,发送高压下电 指令; 依据所述高压下电指令控制主正继电器断开; 当所述无人车接收到接收到所述主正继电器断开的信息后,发送快速 放电指令, 以使所述电机快速放电; 当所述无人车接收到电池的输出端与电机的输入端之间的电压大于第 二预设电 5 CN 111605434 A 说 明 书 3/6 页 压值时,控制所述电池内部继电器断开,完成所述高压下电。 本发明通过在下电操作中采用电流的大小,判断高压部件是否停止工 作,起到保 护高压部件的作用;通过采用电池的输出端与电机的输入端之 间的电压判断电机是否放 电完成,提升安全性。 进一步地,在完成所述高压下电之后,进行所述低压下电;所述低压 下电具体包 括:断开自锁继电器和IG继电器。 进一步地,当所述无人车的所述自动驾驶上电完成之后,若所述无人 车接收到故 障信息时,判断所述无人车的当前车速是否低于预设车速值, 若为是,则控制所述无人车 进行所述高压下电。 本发明通过当无人车接收到故障信息时,若无人车的当前车速低于预 设车速值 时,控制无人车完成高压下电,保证无人车和人的安全。 进一步地,当所述高压下电完成之后的步骤还包括:对所述无人车进 行故障解 除,若所述故障解除后,当所述无人车接收到所述下电请求触发 信号时,控制所述无人车 进行所述低压下电。 本发明通过在故障解除之后,再控制无人车低压下电,方便维修人员 查看故障信 息以及故障原因,进而解决无人车的故障,从而保证无人车下 次的正常工作。 本发明的第二方面提供一种无人车,包括上述所述的无人车控制方法。 附图说明 图1为本发明实施例提供的无人车控制方法流程示意图一; 图2为本发明实施例提供的无人车控制方法中上电流程示意图一; 图3为本发明实施例提供的无人车控制方法中上电流程示意图二; 图4为本发明实施例提供的无人车控制方法中上电流程示意图三; 图5为本发明实施例提供的无人车控制方法中下电流程示意图一; 图6为本发明实施例提供的无人车控制方法中下电流程示意图二; 图7为本发明实施例提供的无人车控制方法中发生故障时,下电流程示 意图一; 图8为本发明实施例提供的无人车控制方法中发生故障时,下电流程示 意图二;











