
技术摘要:
本发明涉及无人机技术领域,公开了一种无人机最低安全高度飞行的控制方法,包括障碍地图制定与飞行控制;障碍地图供无人机进行读取,无人机在飞行过程中按照设定的飞行路线,将飞行路线与离线地图匹配,确认飞行路线经过的地图网格,获取飞行路线沿程的地图网格标高; 全部
背景技术:
目前,部分可自动飞行的无人机搭载有自动避障的硬件设备,主要包括双目视觉 系统等用于识别无人机前进方向上景物的设备,这些硬件设备随时保持工作并实时进行检 测识别,可有效提高无人机的自动避障能力。但这些硬件设备的功耗大,将会损耗极大的电 能,严重降低无人机的续航能力。 而当前无人机的续航是其综合性能的影响因素之一,能够减少无人机的功率损 耗,一定程度上将能够提高无人机续航,从而提高无人机的综合性能。但无人机的自动避障 硬件的存在使得无人机综合性能的提升卡在瓶颈上,为了克服这一困难,需要对无人机的 自动避障方式进行优化,减少无人机在避障这方面的功耗。因此,针对现有的侦测系统存在 的不足,还需要提出更为合理的技术方案,解决现有技术中存在的技术问题。
技术实现要素:
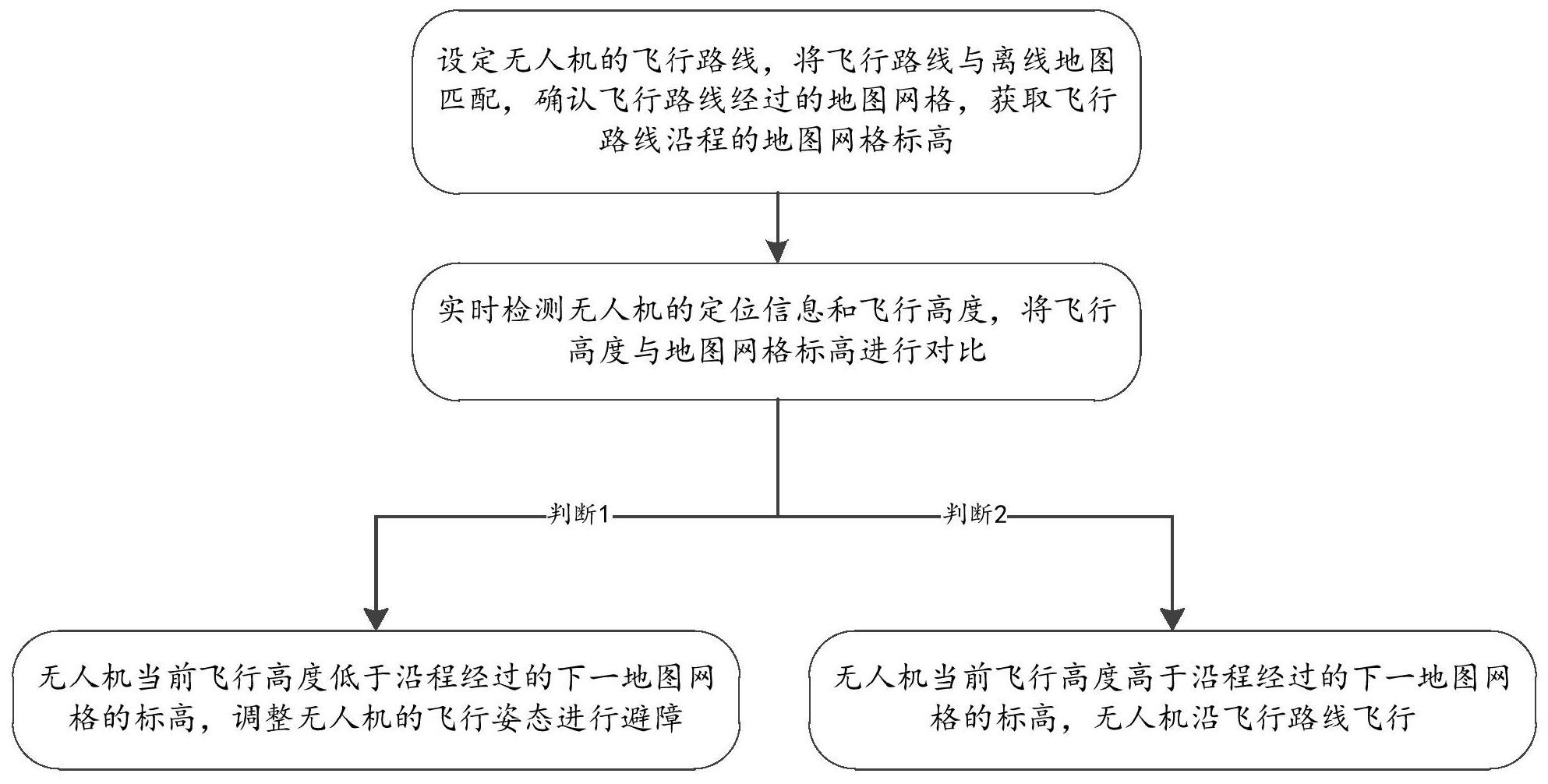
本发明提供一种无人机最低安全高度飞行的控制方法,通过将电子地图划分为若 干地图网格,对地图网格的高度进行标定,由无人机在飞行过程中自行测定飞行高度并与 地图网格的标高进行对比,进而调整自身的飞行高度或飞行方向,主动进行避障。如此实现 了无人机在低功耗的输出下实现避障,还延长了无人机的续航能力。 为了实现上述效果,本发明采用技术方案为: 一种无人机最低安全高度飞行的控制方法,包括障碍地图制定与飞行控制; 障碍地图制定包括: 将电子地图分割为若干地图网格,并对地图网格进行高度标记; 将分割和标记后的电子地图制作为离线地图,传输至无人机; 飞行控制包括: 设定无人机的飞行路线,将飞行路线与离线地图匹配,确认飞行路线经过的地图 网格,获取飞行路线沿程的地图网格标高; 实时检测无人机的定位信息和飞行高度,将飞行高度与地图网格标高进行对比; 当若无人机当前飞行高度低于沿程经过的下一地图网格的标高,调整无人机的飞 行姿态进行避障; 若无人机当前飞行高度高于沿程经过的下一地图网格的标高,无人机沿飞行路线 飞行。 上述公开的飞行控制方法,利用障碍地图作为规划飞行路线的基础指引,在飞行 路线穿过障碍地图上的某个地图网格时,将无人机的飞行高度与地图网格的标高进行对 比,当无人机的飞行高度高于标高时可顺利通过,当无人机的飞行高度低于标高时,可通过 3 CN 111552318 A 说 明 书 2/6 页 主动避让的方式实现避障。在此过程中,采用的均是无人机自身的定位装置,没有采用任何 视觉系统,因此大大地降低了功耗,缩减了电能损耗。 进一步的,对上述公开的无人机飞行控制方法进行优化,具体说明无人机在飞行 控制过程中的动作,由于无人机在飞行过程中遇到的实际情况非常复杂,因此作为一种选 择,此处举出可行的方案:所述的调整无人机的飞行姿态进行避障,包括先控制无人机悬 停,当无人机的飞行高度与下一地图网格的标高差值小于预设值时,无人机提升高度至高 于地图网格的标高后继续前行。这种情况主要针对于障碍物的高度与无人机的飞行高度相 差不大,无人机可通过适当的高度调整后顺利通过。该预设值可设置为1~10m,根据不同无 人机的飞行能力可进行调整。 进一步的,针对无人机飞行控制方法,在遇到不同于上述情况时,还可采取不同的 应对方案,作为一种选择,此处举出具体可行的方案:所述的调整无人机的飞行姿态进行避 障,包括先控制无人机悬停,当无人机的飞行高度与下一地图网格的标高差值大于预设值 时,无人机水平调整前进方向后绕行。按照无人机的升空飞行能力,当障碍物的高度超出了 无人机的飞行高度,或者升空避让需要消耗的能量过大时,可选择转向绕行。 具体的,上述内容中,无人机采用绕行避让的方法时,具体避让方案如下设置:所 述的无人机水平调整前进方向后绕行,包括无人机按照躲避方向旋转α角度后沿直线前行, 再按照回归方向旋转β角度后沿直线前行回归至飞行路线。此处的躲避方向与回归方向为 相反的方向,通常情况下,躲避方向和回归方向均为水平方向。 再进一步,考虑到实际操作的可行性,对躲避方向和回归方向的角度进行了必要 的限制,作为可行的选择,此处举出可行的方案:所述的α小于90°,且所述的β小于90°。 再进一步,无人机遇到第一处障碍物并通过绕行的方式实现了避让,而实际飞行 过程中障碍物的存在极不规范,在无人机避让一处障碍物后,其新的前进方向上存在障碍 物的可能性极大,在这种情况下,可做出新的避让方案,作为一种选择,此处举出可行的方 案:所述的无人机按照躲避方向或回归方向旋转后,若无人机的当前高度低于前行方向上 的下一地图网格标高,则继续按照躲避方向执行方向调整。这样设置的意义在于,当无人机 在障碍物网络中穿行时,对最初的飞行路线保持固定不变,在避让的过程中可能存在连续 避让、多次换向的情况,但最终无人机均需要回归到初始的飞行路线中,往初始的目的地飞 行。 进一步的,无人机在不同的坐标系中均可实现定位,并实现姿态的调整实现避障, 本发明中在无人机的定位上也可采用多种方式实现,作为一种选择,举出如下可行的方案: 所述的无人机坐标信息包括经纬度坐标,无人机的飞行高度通过高度计进行测量。 进一步的,无人机在飞行过程中实时将自身位置与离线地图匹配,找准自身在离 线地图中的位置,并预先判断飞行路线上的障碍物高度,无人机的识别范围越大,越能提前 发现目标障碍物,提前做好避让准备,因此,对无人机的与离线地图的识别进行优化,作为 一种选择,此处举出可行的方案:所述的无人机读取设定范围内地图网格的标高,该设定范 围以无人机的坐标为中心,设定范围的半径随无人机速度的提高而增加。这样设置的意义 在于,当无人机读取的范围大时,功耗增加,消耗的能量多,当无人机读取的范围小时,消耗 的能量对应减少,因此针对实际情况,无人机飞行速度快时,需要更为灵活的应变能力,扩 大其读取范围;当无人机飞行速度慢时,无需特别灵活的应变能力,可适当减小其读取范 4 CN 111552318 A 说 明 书 3/6 页 围。 进一步的,障碍地图上的地图网格是依次紧密相连的,在划分网格时,可按照如下 的方式进行区分:所述的地图网格为正方形,地图网格的边长随无人机速度的提高而增长。 与现有技术相比,本发明的有益效果为: 本发明采用无人机搭载离线地图的方式,直接从离线地图中读取障碍物的高度, 作为指导无人机进行避让的标准,更加简单易行,降低了无人机的能量损耗,提高了无人机 的续航能力。 附图说明 为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附 图作简单地介绍,应当理解,以下附图仅表示出了本发明的部分实施例,因此不应看作是对 范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这 些附图获得其它相关的附图。 图1是障碍地图的制定过程示意图; 图2是无人机的飞行控制原理示意图。











