
技术摘要:
本发明涉及一种智能环保型连续高效桥式埋刮板卸船机,包括臂架机构,其上安装有沿其行走的小车,小车上固定有与臂架机构垂直的垂直刮板装置;臂架机构一侧安装有臂架皮带,其一端与垂直刮板装置出料口对接,另一端对接有垂直安装在门架顶面上的伸缩溜筒,门架底部设置 全部
背景技术:
港口常用的散货卸船机分为间歇式和连续式两种,间歇式卸船机以桥式抓斗卸船 机为主,其特点是机型成熟,适用船型范围大,应用广泛。但是因其采用抓斗卸船,存在三大 主要问题:一是抓斗自重作为无效载荷始终处于生产循环中,因此能耗高;二是抓斗从船舱 抓取物料转运到料斗卸货的过程中,在敞开的空间进行,易造成物料洒落、粉尘飞扬,因此 环保性能差;三是抓斗必须在料堆上抓取物料,在料层比较浅的阶段,只能依靠清仓机的配 合才能完成清仓工作,使这一阶段的生产率明显下降,并且使智能化操作难以实现。 连续式卸船机以埋刮板和链斗两种型式为主,环保性能好,生产率高。但因对物料 的要求高,成熟机型少,目前的应用有限。埋刮板卸船机是借助于在封闭的槽体内运动的刮 板、链条而把物料从船舱提升到臂架,并转运到码头皮带机上的连续卸船设备。具有自重 轻、密封性好、效率高的特点。但因其对物料的要求高,所以目前仅仅应用于粮食码头上接 卸一些容重轻、干燥并流动性好的物料。 目前在役的埋刮板卸船机均为臂架型,工作时,以臂架回转和俯仰两种运动覆盖 整个船舱的作业面。引起的问题为:一是这两种运动均为圆弧运动,速度不易太快,因此会 增加换仓或转换取料作业线的时间,从而降低整船的卸船效率。二是刮板取料头在卸船时 必须走直线,而卸船机只能通过合成回转和俯仰两种运动而实现,从而增加了整机智能化 操作的难度。三是当多台设备共同接卸船舶时,每台设备所占用的码头岸线长,有可能难以 布置。
技术实现要素:
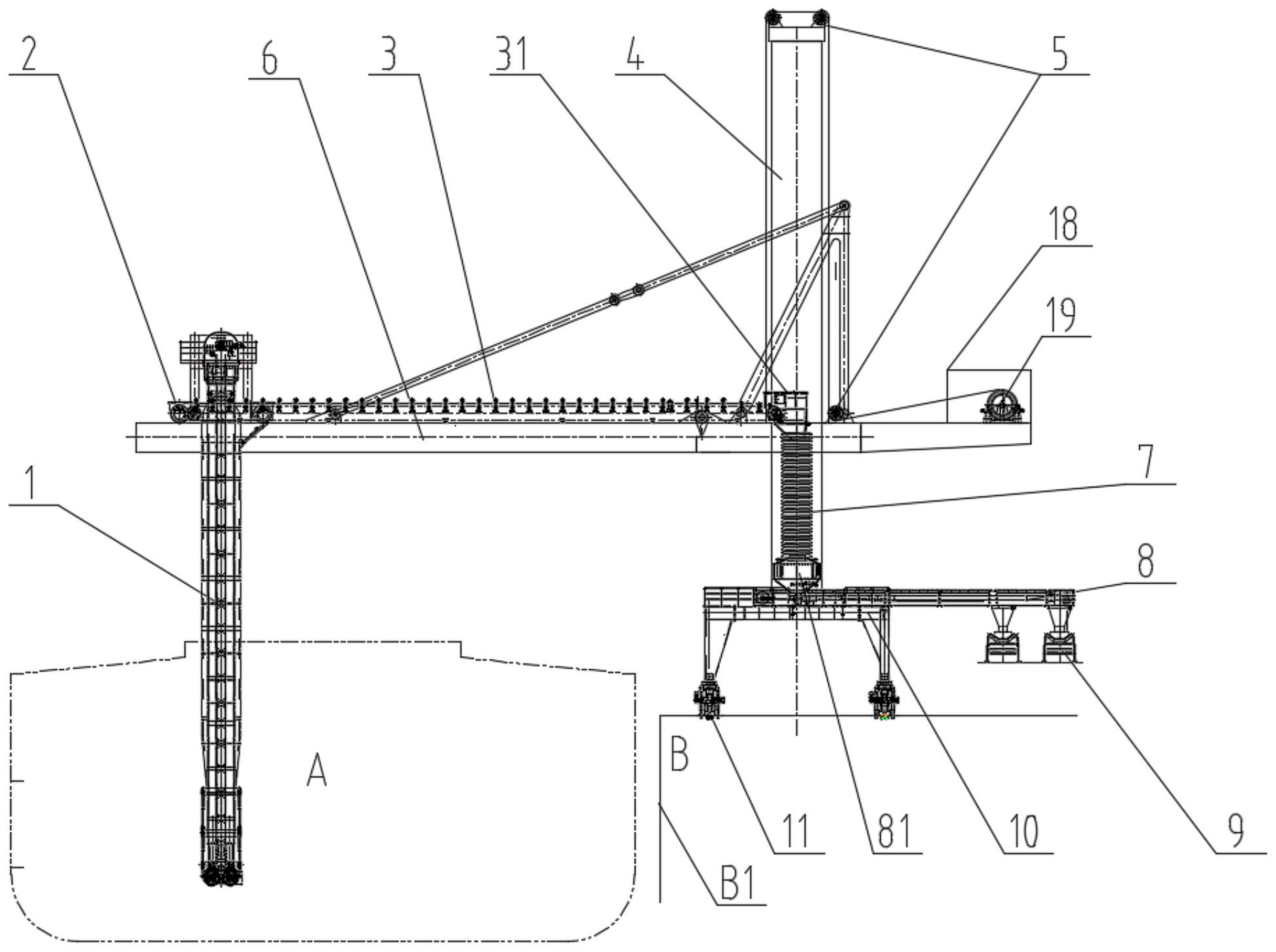
本申请人针对上述现有生产技术中的缺点,提供一种结构合理的智能环保型连续 高效桥式埋刮板卸船机,从而解决现有技术中码头卸船机存在的生产效率低、占用空间大 的技术问题。 本发明所采用的技术方案如下: 一种智能环保型连续高效桥式埋刮板卸船机,包括在空间水平设置的臂架机构, 所述臂架机构上安装有沿其行走的小车,所述小车上固定有垂直刮板装置,所述垂直刮板 装置与臂架机构垂直;臂架机构一侧安装有臂架皮带,其一端与垂直刮板装置出料口对接, 另一端下方对接有垂直安装的伸缩溜筒,伸缩溜筒安装在门架顶面,门架底部设置有大车 行走机构,门架上表面中部安装有与伸缩溜筒平行设置的导向圆柱,臂架机构套置在导向 圆柱上,回转装置安装于臂架机构上,使臂架可绕导向圆柱回转,臂架机构上还安装有控制 其沿导向圆柱上下滑动的升降机构; 还包括水平刮板装置,其一端通过下料斗与伸缩溜筒底部出口对接,另一端的底 3 CN 111606079 A 说 明 书 2/4 页 部对接有布置在码头上的码头皮带机。 作为上述技术方案的进一步改进: 所述臂架机构的安装结构为:包括前梁,前梁与后梁的一端铰接,后梁的另一端上 部安装配重块,后梁上安装有人字架,人字架顶部与折叠拉杆的一端铰接,折叠拉杆的另一 端铰接在前梁上。 前梁与后梁通过浮动铰轴连接,浮动铰轴位于前梁及后梁的上方,两者之间还配 合有垂直抗剪平台。当垂直刮板装置受到在浪涌作用下船底往上的顶升力的时候,前梁可 自行绕浮动铰轴往上转动并从垂直抗剪平台上脱离,以避免对船底造成破坏;折叠拉杆由 三段构成,相邻两段之间分别通过两个中心铰链铰接。 前梁和后梁上同时安装一条供小车行走的轨道,臂架皮带平行设置在轨道一侧; 后梁上表面还安装有卷扬机,卷扬机通过绳索依次与分别安装在后梁上表面、导向圆柱顶 部的滑轮组连接。 臂架皮带的输出端通过转接料斗与伸缩溜筒顶部入口连接。 垂直刮板装置底部连接有螺旋取料头。 所述回转机构包括安装在后梁上的回转支撑体、、以及驱动回转支撑体旋转的电 机。 臂架皮带、垂直刮板装置和水平刮板装置外均设有防尘罩壳。 本发明的有益效果如下: 本发明结构紧凑、合理,操作方便,通过小车带着垂直刮板装置沿臂架机构的轨道 前后行走,大车行走机构使整机沿码头岸线行走,通过两种直线运动的合成覆盖整个船舱 的作业面。直线运动的运行速度高,可提高单机生产效率。而且两种直线运动互不干涉,使 整机的智能化操作易于实现。同时,本发明还具有如下优点: 1、本发明臂架机构为双铰点型式,并配备了折叠拉杆。在正常工作状态下,前梁的 垂直载荷主要通过垂直抗剪平台传递到后梁上。当垂直刮板装置受到在浪涌作用下船底往 上的顶升力的时候,前梁自行绕浮动铰轴往上转动并从垂直抗剪平台上脱离,以避免对船 底造成破坏,特别适合海港卸船作业。 2、本发明臂架机构设置了配重,以平衡前梁、小车及垂直刮板系统的重量。当卸船 机在工作过程中,始终保证上述部件的合成重心在导柱外径内,可减小倾覆力矩,使臂架机 构沿着导柱的滑动易于实现;臂架机构绕导向圆柱做回转运动,以便于船舶的离、靠岸,并 可让垂直刮板装置着地,供维修、保养之用,在台风等特殊工况下,也可做固定。 3、本发明由于小车、大车行走机构均为直线行走,当多台卸船机共同卸船时,互不 干涉,以提高整船的卸船效率,可提高码头岸线的利用率,并适应船舶大型化的趋势。 4、本发明臂架机构沿导向圆柱上下滑动,可适应不同码头水位要求,并可对不同 装载量的船型进行装卸,作业对象多,适用面广。 5、物料从船舱挖取后,所有环节物料均在封闭的空间进行输送,不会造成粉尘洒 落和飞扬。 附图说明 图1为本发明的结构示意图。 4 CN 111606079 A 说 明 书 3/4 页 图2为本发明多台卸船机同时工作时的俯视图。 图3为本发明臂架机构的结构示意图。 图4为图3中A部放大图。 图5为本发明前梁和后梁相对运动时的状态示意图。 图6为本发明大车行走机构和水平刮板装置的安装结构示意图。 图7为本发明水平刮板装置的安装结构示意图。 图8为本发明臂架机构位于最高处出舱时的结构示意图。 图9为本发明在不工作状态时的示意图。 其中:1、垂直刮板装置;2、小车;3、臂架皮带;4、导向圆柱;5、滑轮组;6、臂架机构; 7、伸缩溜筒;8、水平刮板装置;9、码头皮带机;10、门架;11、大车行走机构;12、前梁;13、折 叠拉杆;14、浮动铰链;15、人字架;16、卷扬机;17、后梁;18、配重块;31、转接料斗;81、下料 斗;121、台阶;131、中心铰链;171、垂直抗剪支座;A、货船;B、码头;B1、码头岸线。











