
技术摘要:
本发明涉及惯性定位技术领域,尤其涉及一种基于视觉建模的惯性定位的自校正方法。它包括以下步骤:S1、惯性设备与视觉建模设备同时采集数据;S2、得到状态方程;S3、得到观测方程;S4、将状态方程与观测方程代入到计算预测值与实际值之间误差的协方差矩阵中;S5、代入 全部
背景技术:
现下主流的室内定位技术中,惯性定位技术凭借着其成本低、不受信号强弱影响、 不依赖外部辅助即可进行高精度定位的特点占据了一定的市场。然而,惯性定位由于其误 差累积的特性,无法满足人员长时间或长距离定位的需求,因此需要一项技术来对惯性定 位的结果进行不定时的校正,以弥补误差带来的精度失准。 常见的校正方式主要分为两种,一种是卫星定位校正,使用北斗/GPS定位对惯性 定位结果进行修正,保持其定位精度;第二种是架设如UWB、蓝牙信标这类的基站,通过此类 基站所得的人员位置来修正惯性定位的结果。 前者使用卫星定位来校正惯性定位结果,将使得惯性定位不再具有原本的不受信 号强弱影响特点,一旦来到室内或者高楼附近这类卫星信号差的地区,卫星定位的修正效 果就会失效。 后者虽然适用于室内等卫星信号无法覆盖的地方,但是由于对基站有要求,因此 具有成本高、需要事先部署基站灵活性差等缺点。
技术实现要素:
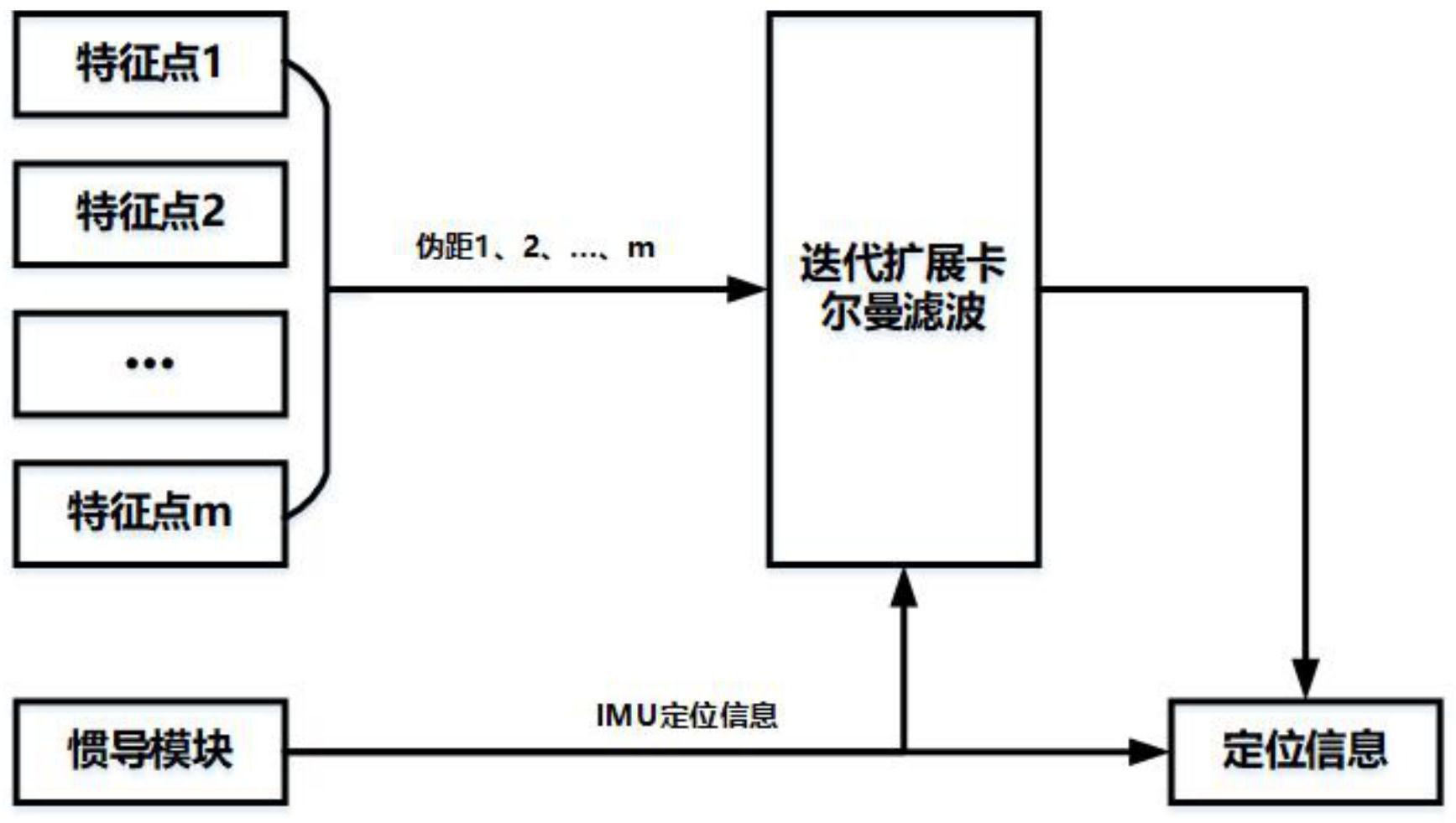
本发明所要解决的技术问题是:提供一种基于视觉建模的惯性定位的自校正方 法,采用这种校正方法,在不需要事先做任何布置的前提下,让自主式惯性定位系统在所有 场景下,都能够保持长时间的高精度定位效果。 本发明所采用的技术方案是:一种基于视觉建模的惯性定位的自校正方法,它包 括以下步骤: S1、惯性设备与视觉建模设备同时采集数据; S2、根据步骤S1采集到的数据计算得到惯性定位的误差向量与视觉建模的特征点 坐标向量,然后根据误差向量与特征点向量得到动点的状态方程; S3、根据采集到的数据得到视觉建模中的动点与特征点之间的距离,同时得到惯 性定位中的动点与特征点的距离,然后根据两个距离的均方差得到动点的观测方程; S4、将步骤S2得到的状态方程与步骤S3得到观测方程代入到计算预测值与实际值 之间误差的协方差矩阵中; S5、代入多个特征点进行非线性化迭代,不断逼近离散时间模型曲线,得到最终校 正结果。 作为优选,步骤S5之后还需要进行平滑处理。 作为优选,所述平滑处理是指采用容积Rauch-Tung-Striebel平滑器进行处理。 作为优选,步骤S2中的误差向量包括姿态误差、位置误差、速度误差、加速度计误 3 CN 111595337 A 说 明 书 2/6 页 差以及陀螺仪误差。 作为优选,步骤S2中得到特征点的具体方法包括以下步骤: S21、将采集的图像进行灰度化和模糊化处理; S22、采用黑塞矩阵对处理后的图像中各像素点进行偏导处理,获得突变点; S23、将突变点与其周围26个像素点进行比较,保留其中的极值点作为特征点。 作为优选,得到特征点后还需要进行特征点筛选。 采用以上方法与现有技术相比,本发明具有以下优点:采用视觉建模技术给惯导 定位技术进行校正,这样并不需要事先布置基站,而能让自主式惯性定位系统在所有场景 下,都能够保持长时间的高精度定位效果,并且整套定位系统可以完全自主独立进行定位 工作,不容易受到外界信号影响。 附图说明 图1为本发明一种基于视觉建模的惯性定位的自校正方法的原理图。











