
技术摘要:
本公开提出一种挖掘机防碰撞控制方法、装置、系统和挖掘机,涉及工程机械技术领域。本公开的一种挖掘机防碰撞控制方法,包括:接收根据对挖掘机周围障碍物的实时位置探测确定的障碍物位置信息;根据障碍物位置信息确定挖掘机在运动中避免与障碍物碰撞的极限位置的极限 全部
背景技术:
随着科技的进步,工程机械领域的发展也进入了加速期,挖掘机在施工项目中发 挥着重要的作用。在挖掘机械施工过程中,特别是在隧道挖掘、马路边开挖沟槽、整机正常 回转、周边有架空电线等复杂工况下,很容易因为视野范围受限或机手操作失误等多种原 因,意外造成自来水管道、燃气管道、电缆管道、架空高压线以及周边固定设施的严重损坏, 甚至还可能出现人员伤亡等严重事故。
技术实现要素:
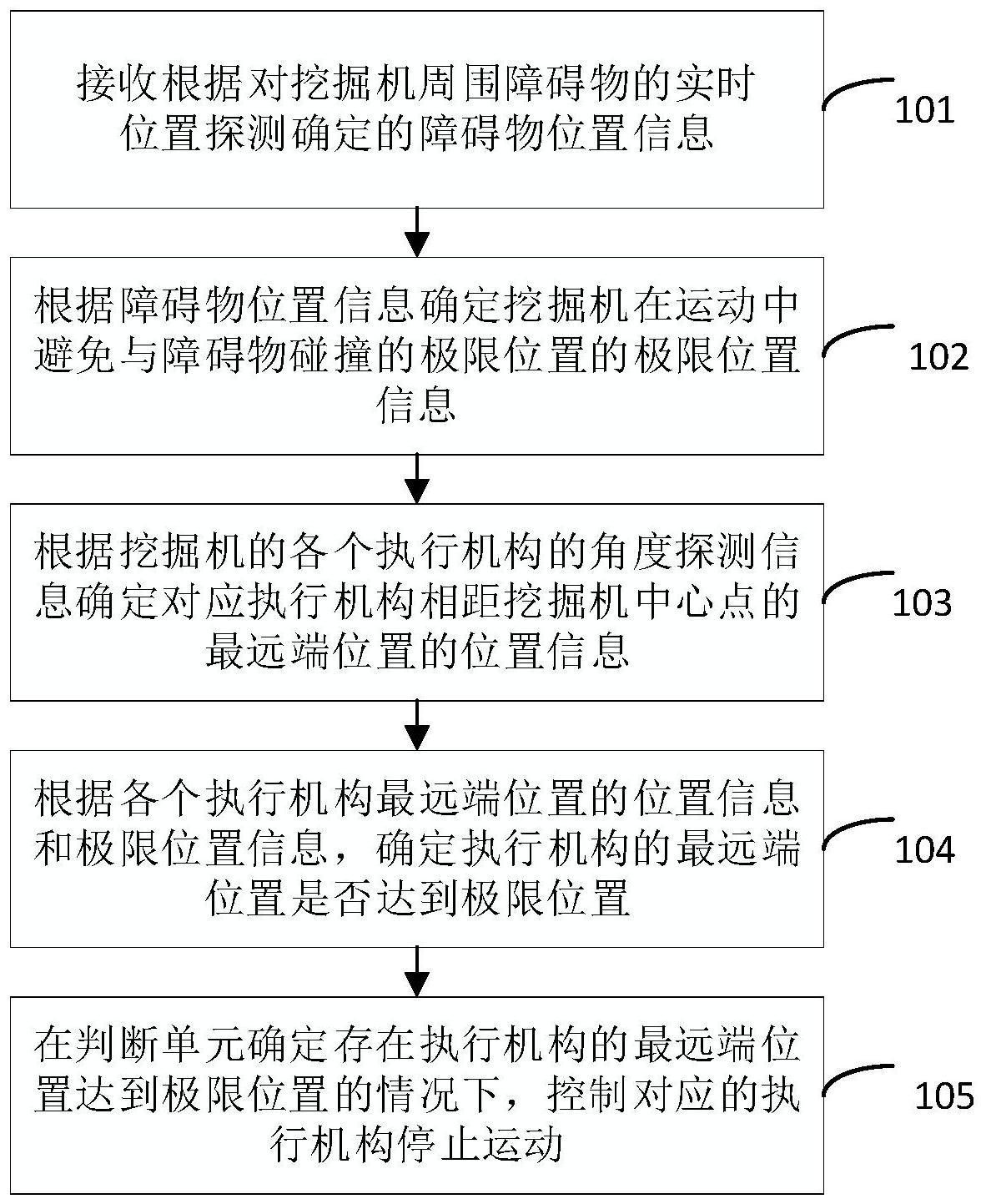
本公开的一个目的在于提高挖掘机的施工安全性。 根据本公开的一些实施例的一个方面,提出一种挖掘机防碰撞控制方法,包括:接 收根据对挖掘机周围障碍物的实时位置探测确定的障碍物位置信息;根据障碍物位置信息 确定挖掘机在运动中避免与障碍物碰撞的极限位置的极限位置信息;根据挖掘机的各个执 行机构的角度探测信息确定对应执行机构相距挖掘机中心点的最远端位置的位置信息;根 据各个执行机构最远端位置的位置信息和极限位置信息,确定执行机构的最远端位置是否 达到极限位置;在确定存在执行机构的最远端位置达到极限位置的情况下,控制对应的执 行机构停止运动。 在一些实施例中,根据挖掘机的各个执行机构的角度探测信息确定对应执行机构 相距挖掘机中心点的最远端位置的位置信息包括:通过各个执行机构的角度传感器的角度 探测数据,获取各个执行机构在运动过程中产生的相对角度变化数据;根据相对角度变化 数据,以及挖掘机整机和各个机构的参数,确定根据角度探测数据确定执行机构相距挖掘 机中心点的最远端位置的位置信息。 在一些实施例中,执行机构包括动臂、斗杆、铲斗和车身本体。 在一些实施例中,控制对应的执行机构停止运动包括:将对应的执行机构的电磁 比例阀的控制输出电流信号设置为零,停止对执行机构的控制。 在一些实施例中,挖掘机防碰撞控制方法还包括:接收用户根据当前识别的障碍 物位置选择性确认、或直接输入的防碰撞模型数据,防碰撞模型数据包括防碰撞高限位信 息、防碰撞低限位信息、防碰撞前限位信息、防碰撞工作装置内收限位信息、防碰撞左限位 信息或防碰撞右限位信息中的一种或多种;根据障碍物位置信息确定挖掘机在运动中避免 与障碍物碰撞的极限位置的极限位置信息包括:根据防碰撞模型数据和障碍物位置信息确 定极限位置信息。 在一些实施例中,根据各个执行机构最远端位置的位置信息和极限位置信息,确 定执行机构的最远端位置是否达到极限位置包括:根据极限位置和各个执行机构的当前角 5 CN 111593783 A 说 明 书 2/13 页 度值,确定各个执行机构的极限目标角度值;判断执行机构的当前角度值是否达到极限目 标角度值;若存在执行机构的当前角度值达到极限目标角度值,则确定对应机构的最远端 位置达到极限位置;若执行机构的当前角度值未达到极限目标角度值,则确定机构的最远 端位置未达到极限位置。 在一些实施例中,挖掘机防碰撞控制方法还包括:在判断单元确定存在执行机构 的最远端位置未达到极限位置的情况下,调节正在运动的执行机构的电磁比例阀的控制电 流,驱动液压装置工作,以便执行机构正常运动。 通过这样的方法,能够通过实时的位置探测确定障碍物的位置,并根据该位置确 定对挖掘机各个部位运动极限位置的限制,从而保证了施工的安全性,也避免反复设定区 域边界参数,提高了挖掘机的工作效率。 根据本公开的一些实施例的一个方面,提出一种挖掘机防碰撞控制装置,包括:障 碍物位置确定单元,被配置为接收根据对挖掘机周围障碍物的实时位置探测确定的障碍物 位置信息;极限位置确定单元,被配置为根据障碍物位置信息确定挖掘机在运动中避免与 障碍物碰撞的极限位置的极限位置信息;执行机构位置确定单元,被配置为根据挖掘机的 各个执行机构的角度探测信息确定对应执行机构相距挖掘机中心点的最远端位置的位置 信息;判断单元,被配置为根据各个执行机构最远端位置的位置信息和极限位置信息,确定 执行机构的最远端位置是否达到极限位置;操作单元,被配置为在判断单元确定存在执行 机构的最远端位置达到极限位置的情况下,控制对应的执行机构停止运动。 根据本公开的一些实施例的一个方面,提出一种挖掘机防碰撞控制装置,包括:存 储器;以及耦接至存储器的处理器,处理器被配置为基于存储在存储器的指令执行上文中 提到的任意一种挖掘机防碰撞控制方法。 这样的挖掘机防碰撞控制装置能够通过实时的位置探测确定障碍物的位置,并根 据该位置确定对挖掘机各个部位运动极限位置的限制,从而保证了施工的安全性,也避免 反复设定区域边界参数,提高了挖掘机的工作效率。 根据本公开的一些实施例的一个方面,提出一种计算机可读存储介质,其上存储 有计算机程序指令,该指令被处理器执行时实现上文中提到的任意一种挖掘机防碰撞控制 方法的步骤。 通过执行这样的存储介质上的指令,能够通过实时的位置探测确定障碍物的位 置,并根据该位置确定对挖掘机各个部位运动极限位置的限制,从而保证了施工的安全性, 也避免反复设定区域边界参数,提高了挖掘机的工作效率。 根据本公开的一些实施例的一个方面,提出一种挖掘机防碰撞控制系统,包括:障 碍物位置探测器,被配置为通过对挖掘机周围障碍物的位置探测确定障碍物位置信息;角 度传感器,被配置为获取挖掘机的各个执行机构的角度探测信息;上文中提到的任意一种 挖掘机防碰撞控制装置,与障碍物位置探测器和角度传感器信号连接;和驱动组件,与挖掘 机防碰撞控制装置信号连接,被配置为在挖掘机防碰撞控制装置的控制下驱动挖掘机的执 行机构运动。 在一些实施例中,障碍物位置探测器包括:位于挖掘机顶部的雷达探测器,被配置 为发出激光束,获取周围障碍物的雷达点云数据;和位置确定控制器,被配置为根据雷达探 测器获取的雷达点云数据,确定障碍物的物理特性和位置坐标。 6 CN 111593783 A 说 明 书 3/13 页 在一些实施例中,角度传感器包括:动臂角度传感器,被配置为获取动臂在上升或 下降过程中相对于水平面的当前角度值;斗杆角度传感器,被配置为获取斗杆在外展或者 内收过程中的相对于动臂的当前角度值;铲斗角度传感器,被配置为获取铲斗在外展或者 内收过程中相对于斗杆的当前角度值;和车身回转角度传感器,被配置为车身回转方向相 对于履带正前方的当前角度值。 在一些实施例中,驱动组件包括:电磁比例阀,被配置为根据来自挖掘机防碰撞控 制装置的控制信号调节执行机构的油缸或车身回转马达运动;其中,电磁比例阀包括阀芯 和比例电磁线圈;比例电磁线圈被配置为根据控制信号驱动阀芯,改变与电磁比例阀连通 的液压油回路里油量的多少,以便驱动组件往复运动;油缸,被配置为在电磁比例阀的调节 下伸出和回缩;车身回转马达,被配置为在电磁比例阀的调节下回转。 在一些实施例中,电磁比例阀包括:动臂电磁比例阀,被配置为根据来自挖掘机防 碰撞控制装置的控制信号调节动臂油缸的运动;斗杆电磁比例阀,被配置为根据来自挖掘 机防碰撞控制装置的控制信号调节斗杆油缸的运动;铲斗电磁比例阀,被配置为根据来自 挖掘机防碰撞控制装置的控制信号调节铲斗油缸的运动;和车身回转马达电磁比例阀,被 配置为根据来自挖掘机防碰撞控制装置的控制信号调节回转马达向左和向右回转,以控制 挖掘机车身回转的角度。 在一些实施例中,挖掘机防碰撞控制系统还包括:输入和显示装置,被配置为接收 用户根据当前识别的障碍物位置选择性确认、或直接输入的防碰撞模型数据,防碰撞模型 数据包括防碰撞高限位信息、防碰撞低限位信息、防碰撞前限位信息、防碰撞工作装置内收 限位信息、防碰撞左限位信息或防碰撞右限位信息中的一种或多种。 这样的挖掘机防碰撞控制系统能够通过实时的位置探测确定障碍物的位置,并根 据该位置确定对挖掘机各个部位运动极限位置的限制,从而保证了施工的安全性,也避免 反复设定区域边界参数,提高了挖掘机的工作效率。 根据本公开的一些实施例的一个方面,提出一种挖掘机,包括上文中提到的任意 一种挖掘机防碰撞控制系统。 这样的挖掘机能够通过实时的位置探测确定障碍物的位置,并根据该位置确定对 挖掘机各个部位运动极限位置的限制,从而保证了施工的安全性,也避免反复设定区域边 界参数,提高了挖掘机的工作效率。 附图说明 此处所说明的附图用来提供对本公开的进一步理解,构成本公开的一部分,本公 开的示意性实施例及其说明用于解释本公开,并不构成对本公开的不当限定。在附图中: 图1为本公开的挖掘机防碰撞控制方法的一些实施例的流程图。 图2为本公开的挖掘机防碰撞控制方法的另一些实施例的流程图。 图3为本公开的挖掘机防碰撞控制装置的一些实施例的示意图。 图4为本公开的挖掘机防碰撞控制装置的另一些实施例的示意图。 图5为本公开的挖掘机防碰撞控制系统的一些实施例的示意图。 图6为本公开的挖掘机防碰撞控制系统的另一些实施例的示意图。 图7为本公开的挖掘机的一些实施例的示意图。 7 CN 111593783 A 说 明 书 4/13 页 图8为本公开的挖掘机的执行机构活动区域的一些实施例的示意图。











