
技术摘要:
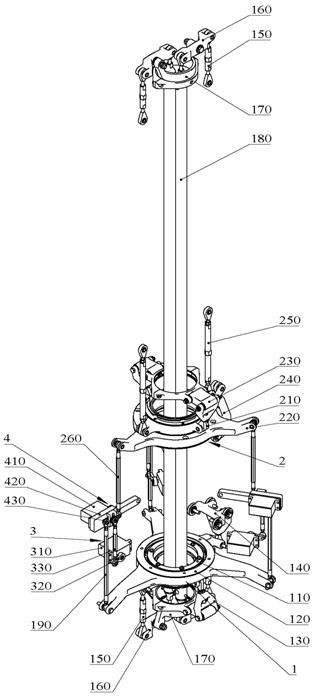
本发明公开了一种用于共轴双旋翼无人直升机的操纵系统及操作方法,包括上旋翼操纵系统、下旋翼操纵系统、综合舵机操纵系统、航向舵机操纵系统,其中上旋翼操纵系统包括上旋翼自动倾斜器、上旋翼自动倾斜器内环扭力臂,上旋翼自动倾斜器外环扭力臂;所述下旋翼操纵系统 全部
背景技术:
共轴双旋翼无人直升机是无人直升机的一种重要的气动布局形式,具有良好的气 动效率和优异性能,在多个工农业领域和军事领域有着广泛的应用。 共轴双旋翼无人直升机的传统操纵系统主要有两种,一种是半差动形式,即航向 操纵时仅控制一副旋翼桨叶总距变化,实现直升机航向偏转和稳定,优点是结构相对简单, 缺点是航向操纵时造成了直升机航向运动和升降运动的耦合,而且航向操纵机构要通过与 上旋翼或者下旋翼操纵系统混合,局部结构较为复杂,同时航向舵机需要承担一部分旋翼 桨叶的铰链力矩,负荷较大;另一种是全差动结构,即航向操纵时同时控制两幅旋翼桨叶总 距变化,实现航向偏转和稳定,包括全机械和纯电子两种形式,优点是操纵效率高,减小了 直升机航向运动和升降运动的耦合,缺点是全机械式全差动结构过于复杂,重量较重,纯电 子式需要飞控额外增加航向控制策略实现航向操纵全差动效果,增加了飞控算法难度和舵 机负荷。 因此如何在现有共轴双旋翼无人直升机操纵系统结构基础上进行改进,实现无人 直升机的四个方向操纵,降低整个操纵系统的复杂程度,减小航向操纵引起的直升机升力 变化,同时减小无人机舵机尤其是航向舵机的负荷,是本领域技术人员亟需解决的问题。
技术实现要素:
本发明要解决的技术问题是克服现有的缺陷,提供一种用于共轴双旋翼无人直升 机的操纵系统及操作方法,可以有效解决











