
技术摘要:
本发明公开了一种基于双线阵扫描成像系统的细胞图像重构方法,包括依次建立细胞加速度模型、加速度重构模型,利用加速度重构模型和变加速度重构结合,得出扫描坐标系与细胞通道坐标系的加速度区域的映射,继而得到各个加速度区域的重构细胞图像,将各个加速度区域的重 全部
背景技术:
生物组织的细胞图像包含大量的生物信息,对生物样品中的细胞图像进行采集和 分析,是现代医学进行疾病诊断、健康监测和新药研制的重要依据。目前主要采用分选速度 快、灵敏度高的流式细胞仪完成对细胞的检测,但其价格昂贵、体积大的特点,极大的限制 了推广和应用。而随着智慧医疗、社区医疗和远程医疗的推广和普及,开发小型化、低成本、 低功耗和使用简单,细胞图像采集分析仪器逐渐受到关注。微流控技术能把样品的制备、分 离、反应及检测等基本操作集成在芯片上。作为生物芯片基石的微流控技术能在微纳米尺 度空间中对流体进行操控,具有高通量、集成小型化与自动化、污染少、样本消耗量少等优 点。微流控技术以它所独有的快速分析、低功耗、微型化和自动化等特点发展非常迅速。 将微流控技术、无透镜成像技术与图像处理技术结合,使细胞检测的小型化、低成 本、易操作以及大众化成为可能。现有的基于微流控技术与线阵探测器的线阵扫描成像系 统虽能解决传统的问题,但是此系统对细胞流速的估计要求非常精确。由于采用单线阵扫 描成像系统无法计算到足够的细胞流速信息,从而无法精确计算细胞流速,导致细胞图像 重构失真。但是应用双线阵扫描成像系统可以精确计算细胞流速信息,然而在实际操作中, 细胞流速不稳定也会造成细胞图像重构失真等问题。因此,针对细胞以变加速度流动时的 线阵扫描图像重构算法在线阵扫描成像系统中具有重要意义。
技术实现要素:
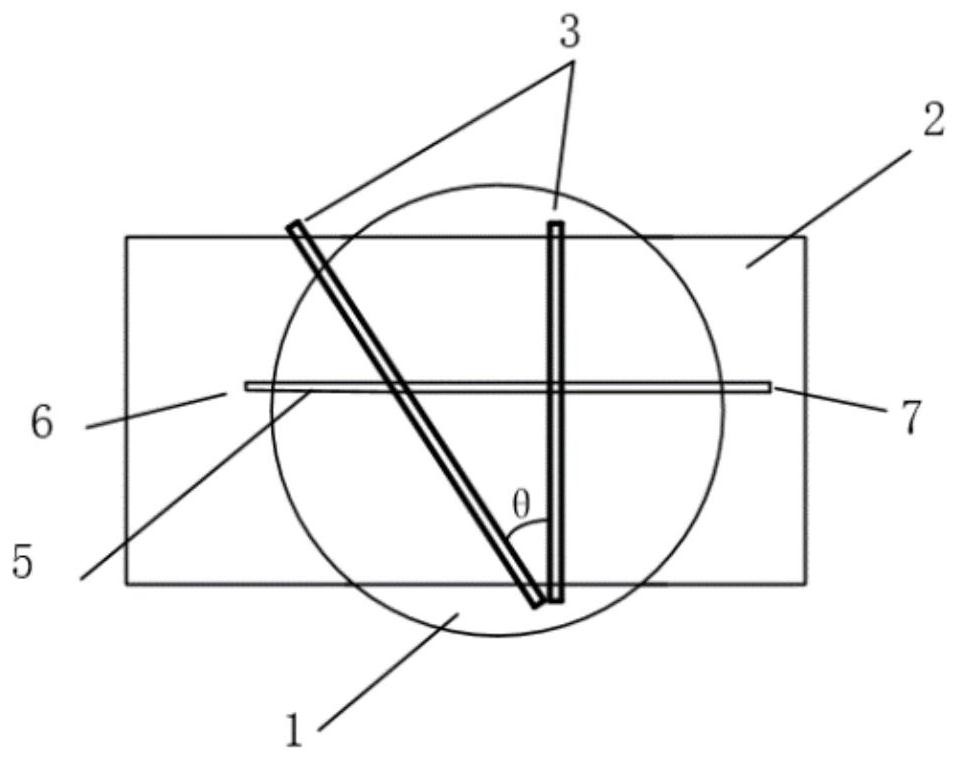
本发明的目的是提供一种基于双线阵扫描成像系统的细胞图像重构方法,解决了 因细胞流速不稳定而造成的双线阵扫描成像系统采集到的细胞图像重构的失真问题。 本发明所采用的技术方案是,一种基于双线阵扫描成像系统的细胞图像重构方 法,双线阵扫描成像系统包括平行光源、微流控芯片和数据处理装置,微流控芯片设置有直 线型微通道,直线型微通道两端分别设置为微通道微液样品入口和微通道微液样品出口, 微流控芯片的微通道待测区域下表面设置有夹角为θ的两个线阵探测器,0≤θ≤90°,其中, 一个线阵探测器与直线型微通道垂直,另一个线阵探测器位于该线阵探测器靠近微通道微 液样品入口6一侧,具体按照以下步骤实施: 步骤1、建立微通道坐标系和线阵扫描坐标系,分别构建细胞速度分解模型、扫描 分辨率模型、线阵扫描系统距离模型以及细胞加速度模型; 步骤2、进行坐标变换,重构细胞加速度模型,得到加速度重构模型; 步骤3、利用加速度重构模型和变加速度重构结合,得出扫描坐标系与细胞通道坐 标系的加速度区域的映射,继而得到各个加速度区域的重构细胞图像; 步骤4、将各个加速度区域的重构细胞图像拼接形成最终的超分辨率图像,细胞图 6 CN 111612692 A 说 明 书 2/9 页 像的重构完成。 本发明的特点还在于, 步骤1具体按照以下步骤实施: 步骤1.1建立微通道坐标系和线阵扫描坐标系 以微流控芯片的直线型微通道流向与细胞第一个交叉点为原点O,直线型微通道 长度方向为Oy轴,Oy轴以细胞流向为正方向,垂直直线型微通道的方向为Ox轴,Ox轴以指向 直线型微通道另一侧的方向为正方向,建立微通道图像的直角坐标系即微通道坐标系O(x, y); 以微流控芯片的直线型微通道流向与细胞的第一个交叉点为原点L,线阵探测器 长度方向为Lx轴,Lx轴以与Ox轴正方向成锐角的方向为正方向,垂直线阵探测器的方向为Ly 轴,Ly轴以与Oy轴正方向成锐角的方向为正方向,建立线阵扫描图像的直角坐标系即线阵扫 描坐标系L(x,y); 步骤1.2、构建细胞速度分解模型 线阵探测器与直线型微通道流向的夹角为θ,Lx轴和Ly轴的交点为细胞当前经过线 阵时Ly轴的坐标; 设微液中细胞在直线型微通道内以速度V流动,将流速V在微通道坐标系O(x,y)中 分解得到分解速度 在线阵扫描坐标系L(x,y)中分解得到分解速度 两 个坐标系之间分解速度之间的转换关系即细胞速度分解模型如下, 步骤1.3、构建扫描分辨率模型 两线阵探测器像素间距为S,则Ox轴方向成像分辨率为 且Oy轴方向的分辨率 应与Ox轴方向的分辨率相同;设线阵探测器的采样频率为f,则线阵成像一帧图像,细胞沿Ly 轴所走的距离为 得出线阵成像图像分辨率与通道图像分辨率关系式即扫描分辨率 模型如下, 步骤1.4、建立线阵扫描系统距离模型 假设细胞沿Oy轴方向匀速流动,当细胞到达原点O时开始在线阵扫描成像系统上 成像;细胞上一点A1,坐标为(Ox,Oy),与Ox轴、Oy轴的真实距离分别为 在线阵探测 器上得到像素数为Lw、行数为Lh的图像,线阵探测器采集到A1的像素为P1,A1在线阵扫描图像 7 CN 111612692 A 说 明 书 3/9 页 上对应点为A2,其坐标为(Lx,Ly),与Lx轴、Ly轴的真实距离分别为 则线阵扫描系 统距离模型为 当该细胞还存在Ox轴的速度时,其沿Oy轴方向匀速流动在Ox轴方向上移动了 的距离, 此时线阵探测器采集到A1的像素为P2; 步骤1.5、建立细胞加速度模型 假设流动时细胞存在加速度a,加速度a可在坐标系O(x,y)中分别沿Ox轴、Oy轴分解 为 在坐标系L(x,y)中分别沿Lx轴、Ly轴分解为 各加速度转换关系即细胞 加速度模型为, 步骤2具体按照以下步骤实施: 步骤2.1、假设细胞仅沿Oy轴方向匀速运动,A1点在Ox轴方向的坐标就是线阵探测 器上采集到A1点的像素的坐标,即Ly轴的坐标,在Oy轴和Ly轴的坐标变换关系中,A1点距离Ox 轴的距离等于A2点距离Lx轴的距离;A1点与P1点的实际距离由A1点距离Oy轴的距离doy和P1点 到Ox轴的距离组成,也可由A1点沿Oy轴的速度和A2点的纵坐标Ly计算,得出坐标变换公式如 下, 步骤2.2、假设细胞沿Oy轴方向匀速运动,且存在Ox轴的速度,A1点与P1点的实际距 离由A1点与P1点距离和P1点与A2点沿Oy轴方向上的距离组成,因此,对式(13)坐标变换关系 更新如下, 8 CN 111612692 A 说 明 书 4/9 页 步骤2.3、假设细胞以Vox、Voy分别为Ox轴、Oy轴初速度,以 分别为Ox轴、Oy 轴加速度在直线型微通道内匀加速流动,此时,速度、加速度以及在Ox轴方向上移动的距离 的关系式即加速度重构模型如下, 步骤3具体按照以下步骤实施: 步骤3.1、细胞以Vox、Voy分别为Ox轴、Oy轴初速度,以 分别为Ox轴、Oy轴加 速度在直线型微通道内匀加速流动时,由微通道坐标系映射在线阵扫描坐标系下的坐标变 换关系式(14)得出线阵扫描坐标系L(x,y)的坐标Lx关于物体通道坐标系O(x,y)的坐标Ox、 速度Vox、加速度 的函数关系式,Ly关于物体通道坐标Oy、速度Voy、加速度 的函数关系 式如下, 步骤3.2、细胞在直线型微通道中的流动实际为变加速流动,假设从t0时刻线阵开 始采集细胞图像,此时物体瞬时流速为 ,该细胞从t0到达t1时刻,线阵探测器采集了y0行 的像素数据,且细胞以 为加速度流经线阵探测器,t0与t1的时间间隔为线阵探测器采集 细胞图像的等时间间隔,在t1时刻,细胞与线阵探测器分别交于m、n两点,细胞沿Ly轴运动的 距离为 , 的函数关系式为 t1时刻n点的纵坐标即n点 距Ox轴的距离为 将线阵探测器采集了y0行的像素数据看成一条直线,通过线阵探测器在坐标系O (x,y)下的斜率ρ=-1/tanθ,得出该直线在t1时刻的方程,即y0关于在t1时刻Ox轴坐标为x0的 线性关系式: 步骤3.3、将每段线阵探测器采集细胞图像的时间间隔作为一个加速度区域,每个 加速度区域加速度不同,根据步骤3.2同理推出,细胞具有K个加速度时,K>0,细胞沿Ly轴 运动的距离为 n点的纵坐标 其中i=1 , 2,3,...,K,至此,坐标系L(x,y)中第i个加速度区域对应至坐标系O(x,y)的加速度a的表达 式为:当 时, 根据式(16)和式(17)推导出细胞在坐标系L(x,y)第i个加速区域坐标变换公式即 加速度重构模型如下: 9 CN 111612692 A 说 明 书 5/9 页 式(18)中,aLyi表示细胞在坐标系L(x,y)第i个加速区域沿Ly轴分解的加速度。 步骤4具体为,根据式(18)对每一段加速度区域坐标变换公式求解可得坐标系O (x,y)下第i个加速区域横、纵坐标值 映射在坐标系L(x,y)下第i个加速区域横、纵 坐标值 由于 是相对于任意一加速度段的坐标,其真实对应在坐标系L (x,y)的坐标 其中真实对应在坐标系L(x,y)的横坐标与各自加速度区域的横坐 标相同,即: 真实对应在坐标系L(x,y)的纵坐标为每一加速度段的纵坐标之 和,即: 将所采集细胞图像根据其在坐标系L(x,y)中映射的坐标进行拼 接,得到超分辨率图像,细胞图像的重构完成。 本发明的有益效果是: 本发明一种基于双线阵扫描成像系统的细胞图像重构方法,基于细胞在微流控芯 片的微通道以变加速度运动的特点,在基本数学模型的基础上,得到加速度重构模型,并利 用加速度重构模型和变加速度重构方法的结合得出细胞图像的重构模型,最终此重构模型 将双线阵探测器的去背景后的扫描图像重构出完整的高分辨率细胞图像;解决了因细胞流 速不稳定而造成的双线阵扫描成像系统采集到的细胞图像重构的失真问题,对于应用于微 流控芯片与线阵探测器的流式细胞仪采集的细胞图像的获取具有十分重要的意义。 附图说明 图1是本发明一种基于双线阵扫描成像系统的细胞图像重构方法所采用的双线阵 扫描系统的结构示意图; 图2是微通道坐标系和线阵扫描坐标系的设置图; 图3是细胞速度分解模型图; 图4是扫描分辨率模型; 图5是线阵扫描系统距离模型图; 图6是细胞加速度模型图; 图7是细胞经过线阵的速度变化示意图; 图8是细胞经过线阵的位置变化示意图; 图9是本发明一种基于双线阵扫描成像系统的细胞图像重构方法得到的重构细胞 图像; 图10是的重构前双线阵扫描成像系统所采集的去背景后的细胞图像。 图中,1.平行光源,2.微流控芯片,3.线阵探测器,4.数据处理装置,5.直线型微通 道,6.微通道微液样品入口,7.微通道微液样品出口。











