
技术摘要:
本发明公开了一种用于控制车辆的自动驾驶系统的方法和系统。还公开了一种对应的非瞬态计算机可读存储介质、车辆控制设备以及包括这种控制设备的车辆。该方法包括:从车辆的感知系统接收环境数据,所述环境数据包括多个环境参数;基于所接收的环境数据,通过自学习模型 全部
背景技术:
如今,许多车辆具有以高级驾驶员辅助系统(ADAS)的形式的多种驾驶员支持功 能。此外,这些支持功能中的许多支持功能构成了当前和未来的自动驾驶(AD)功能的基础。 ADAS特征或功能的示例包括车道偏离警告系统、车道对中、车道保持助手、驾驶员辅助,车 道改变辅助、停车传感器、行人保护系统、盲点监视器、自适应巡航控制(ACC)、防抱死制动 系统等。这些功能通过响应某些场景的一个或多个警告或自动操作,对车辆的传统的驾驶 员控制进行补充。 这些特征和功能的发展不仅在增加道路安全性方面,而且在减少车辆用户的认知 负担和改善整体用户体验方面都是重要的因素。 因此,在本领域中需要用于控制例如车辆的自适应巡航控制(ACC)系统的新的和 改善的方法和系统。
技术实现要素:
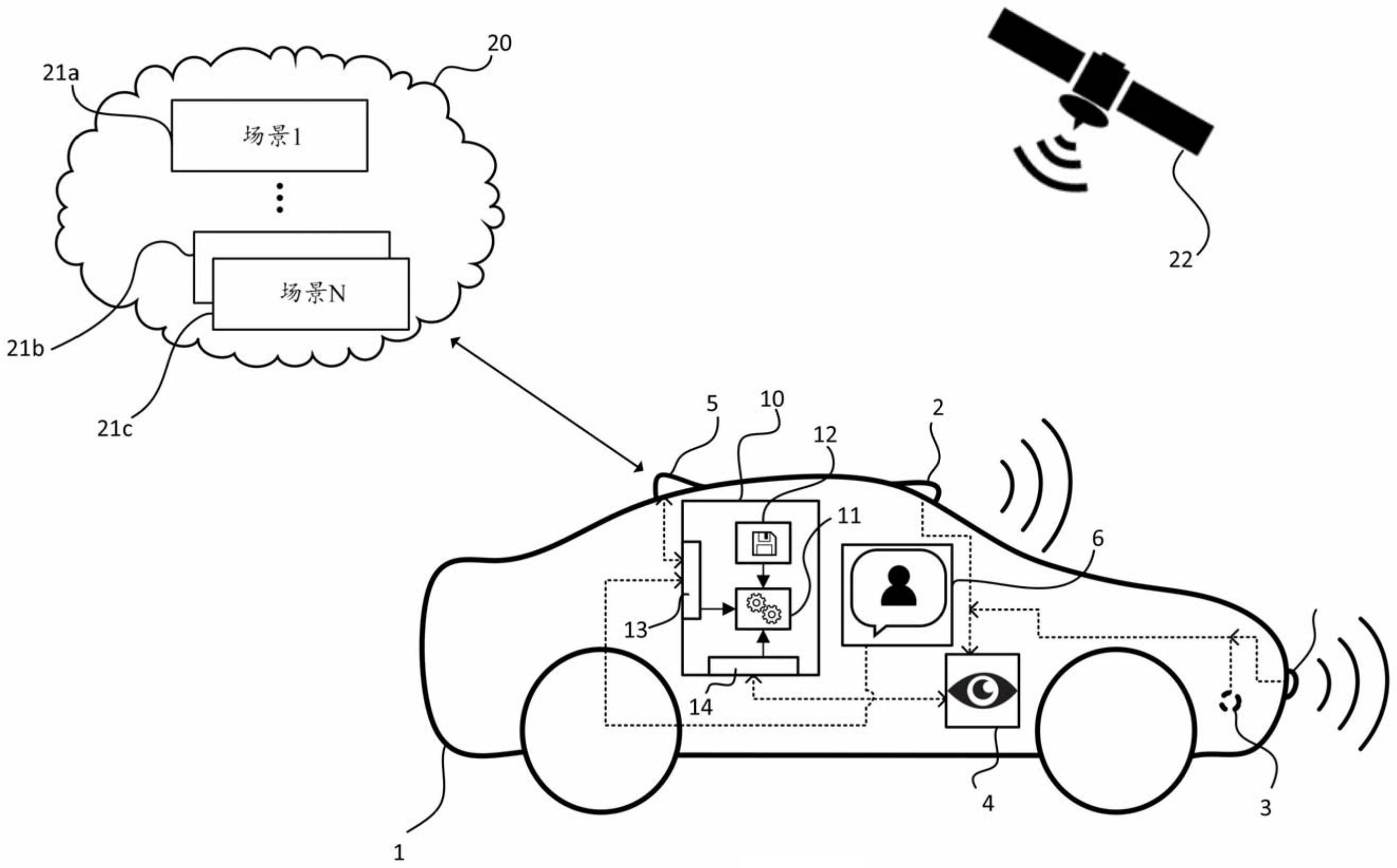
因此,本发明的目的是提供一种用于为车辆的自动驾驶系统(ADS)设置调整参数/ 控制车辆的自动驾驶系统(ADS)的调整参数的方法、一种非瞬态计算机可读存储介质、一种 车辆控制设备以及一种包括这种车辆控制设备的车辆,该方法、非瞬态计算机可读存储介 质、车辆控制设备以及车辆减轻当前已知系统的全部或至少一些缺点。 该目的通过如权利要求中所限定的方法、非瞬态计算机可读存储介质、车辆控制 设备和车辆来实现。在本上下文中,术语示例性被理解为用作实例、示例或说明。 根据本发明的第一方面,提供了一种用于为车辆的自动驾驶系统(ADS)设置调整 参数的方法。该方法包括:从车辆的感知系统接收环境数据,其中,环境数据包括多个环境 参数。进一步,该方法包括:基于所接收的环境数据,通过自学习模型确定环境场景,并且基 于自学习模型和所确定的环境场景为ADS设置调整参数。调整参数定义ADS的动态参数。该 方法进一步包括:接收表示对所设置的调整参数的车辆用户反馈的至少一个信号,并且基 于所接收的车辆用户反馈,针对所识别的环境场景的所设置的调整参数更新自学习模型。 在此,提出一种能够为车辆的ADS(例如自适应巡航控制(ACC)系统)提供个性化调 4 CN 111610781 A 说 明 书 2/8 页 整参数并且从而增加车辆的驾驶员的总体驾驶体验和舒适度的方法。此外,所提出的方法 增加了ADS功能的自动性,这可以导致更少的物理按钮和更少的来自驾驶员的交互,进一步 改善了驾驶员的舒适度。 本发明至少部分地基于这样的认识,即为了更接近完全自主驾驶解决方案,驾驶 员/用户相对于几个自动驾驶系统(例如ACC)的满意度至关重要。具体地,重要的是提供一 种ADS,在该ADS中,调整参数被设置为使得驾驶员/用户在行驶期间无论状况如何都感到舒 适。因此,本发明人认识到,通过利用在这种系统中利用用户反馈作为关键输入参数的自学 习模型(例如机器学习算法),可以提供完全定制的解决方案。 根据本发明的示例性实施例,确定环境场景的步骤包括:确定表示多个环境参数 的多个信号之间的关系,并且其中,设置调整参数的步骤包括:基于所确定的表示多个环境 参数的多个信号之间的关系来设置调整参数。在此,提供如何基于用户反馈数据更新自学 习模型的示例实现。 进一步,根据本发明的另一示例性实施例,该方法包括:将无用户反馈解释为正反 馈并且相应地更新自学习模型。换句话说,如果未接收到用户反馈,则奖励自学习模型。当 未接收到用户反馈时,相应地假设车辆的驾驶员/用户对所设置的调整参数感到满意。这是 基于这样的认识,即用户通常倾向于抱怨,而不是对系统产生正反馈,因此可以合理地假设 缺少反馈实际上是满意的标志。 进一步,根据本发明的第二方面,提供了一种非瞬态计算机可读存储介质,其存储 被配置成由车辆控制系统的一个或多个处理器执行的一个或多个程序,所述一个或多个程 序包括用于实施根据本发明的第一方面的实施例中的任何一个实施例的方法的指令。对于 本发明的这一方面,存在与先前讨论的本发明的第一方面类似的优点和优选的特征。 又进一步,根据本发明的第三方面,提供了一种用于为车辆的自动驾驶系统(ADS) 设置调整参数的车辆控制设备。车辆控制设备包括:至少一个处理器、至少一个存储器、至 少一个传感器接口和至少一个通信接口。处理器被配置成执行存储在存储器中的指令,以 实施用于为车辆的ADS设置调整参数的方法。该方法包括:接收包括多个环境参数的环境数 据;基于所接收的环境数据,通过自学习模型确定环境场景;基于自学习模型和所确定的环 境场景为ADS设置调整参数,该调整参数定义ADS的动态参数;以及接收表示对所设置的调 整参数的用户反馈的至少一个信号,并且基于所接收的用户反馈,针对所识别的环境场景 的所设置的调整参数更新自学习模型。对于本发明的这一方面,存在与先前讨论的本发明 的第一方面类似的优点和优选的特征。 本发明的进一步的实施例被限定在从属权利要求中。应当强调的是,当在本说明 书中使用时,术语“包括/包含”用于指定所述特征、整数、步骤或部件的存在。它不排除一个 或多个其他特征、整数、步骤、部件或其群组的存在或添加。 将参考下文描述的实施例进一步阐明本发明的这些和其他特征和优点。 附图说明 本发明的实施例的其他目的、特征和优点将从以下详细描述中变得明显,参考附 图,其中: 图1是根据本发明的实施例的用于为车辆的自动驾驶系统(ADS)设置调整参数的 5 CN 111610781 A 说 明 书 3/8 页 方法的流程图表示。 图2是根据本发明的实施例的用于为车辆的自动驾驶系统(ADS)设置调整参数的 车辆控制设备的示意性立体图。











