
技术摘要:
本发明公开了一种气泡驱动的环状微单元阵列化组装系统及方法,利用左右通气管和变向阀在培养皿的小孔阵列上交替地产生气泡,培养液中上升的气泡推动均匀分布在培养液底部的微血管二维环形单元,微血管二维环形单元在气泡的推动下升至培养液顶部,停止供气后下落,一部 全部
背景技术:
近年来,组织工程正在经历着史无前例的快速发展期。很多相关科学家和医疗从 业者利用这一技术构建人造组织或器官等来替代人体或动物体内受损、恶化或者死亡的组 织和器官,给人类健康带来巨大福音,是未来生物高新技术的重要组成部分。但是,由于人 造组织内血液循环的缺失,很多已经培育成一定规模的人工组织或器官无法及时获得培养 液内的营养物质或氧气而失、死亡,这成为阻碍组织工程发展的一项重要因素。因此,人造 血管逐渐成为组织工程不可或缺的一项技术前提。由于分子的扩散效应,人造血管必须足 够微细才能使得人造细胞能够主动吸收200μm以内的营养物质。就目前而言,人造微血管需 要满足外径范围通常是200-250μm。 总体而言,人工微血管的制备主要是机械接触式操作和基于微流控芯片两种方 式。其中,机械接触式操作由于其灵活性高,针对一定粗细范围内的微血管都能够适用。机 械接触操作主要使用微纳操作手,在外界复杂的视觉系统的检测和控制下,仿人手对通过 光交联材料与细胞群混合并固化来生成微血管二维环状单元进行抓取操作,然后将其制定 生长柱上,累计多个单元,经过一段时间的生长即可获得人工培育的微血管。然而,在这个 过程中伴随着很多问题,首先,微观世界不同于宏观世界,物体与物体之间的粘附力会随着 尺寸的减小而变得十分明显,这使得机械手对微血管二维环形单元的释放变得非常困难, 释放成功率低;其次,直接接触往往由于操作失误,不可避免的会损伤已经组装好的微血 管,使得前功尽弃;最后整个操作系统由于加入了视觉反馈,较为复杂,且难以实现高效工 作。而基于微流控芯片的组装方式,虽然解决了系统复杂、损坏微血管的问题,但由于其流 道尺寸固定,不能适用多种目前,灵活性差,又容易出现堵塞流道的问题,也未能广泛应用。 以上两种操作方式都是通过“自下而上”的逻辑来实现,所说的微血管二维环状单元即使最 小的单元,然后将其装配成形,在培养液内生长而获得微血管。
技术实现要素:
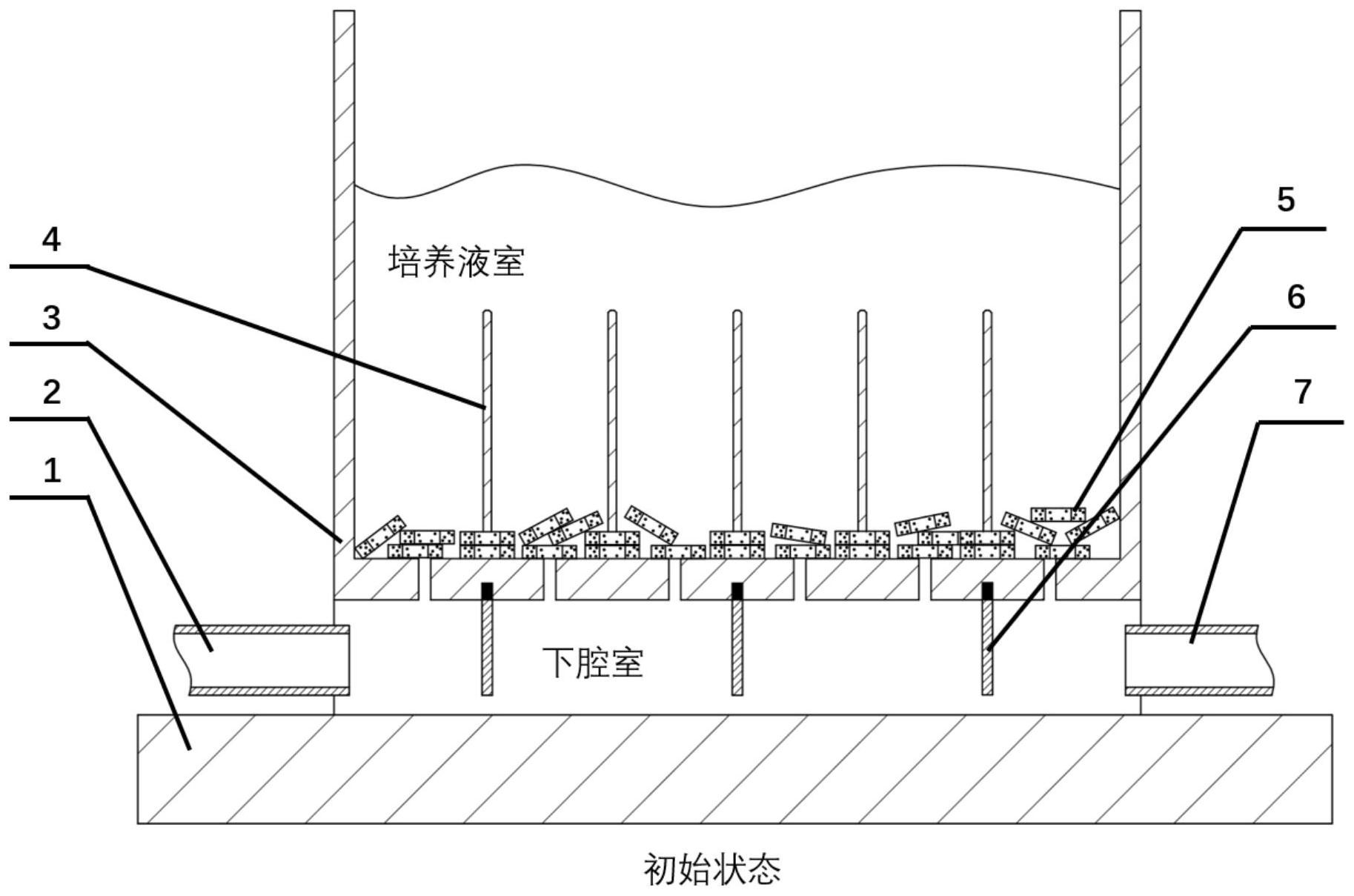
有鉴于此,本发明的目的是提供一种气泡驱动的环状微单元阵列化组装系统及方 法,有效解决现阶段微血管二维环状单元在微组装过程中系统复杂、灵活性差等问题。 一种气泡驱动的环状微单元阵列化组装系统,包括左进气管(2)、培养皿(3)、收集 柱(4)、微血管二维环形单元(5)、变向阀(6)、右进气管(7); 培养皿(3)分为上腔室和下腔室,两腔室中间的隔板开有阵列式排布的小通孔;上 腔室装有含有微血管二维环形单元(5)的培养液;下腔室左右两侧开有长孔,分别对应联通 左进气管(2)和右进气管(7)。 变向阀(6)的一端固定在两腔室中间的隔板的下表面上,另一端为自由端;相邻两 3 CN 111575183 A 说 明 书 2/4 页 列小通孔之间均固定有一组变向阀(6);变向阀(6)轻质柔性材料制作,在左进气管(2)和右 进气管(7)进气的作用下,可向右或者向左弯折,并覆盖住隔板上其右侧或者左侧的一列小 通孔; 收集柱(4)以阵列的形式固定在隔板的上表面,隔板上相邻两列小通孔之间设置 一列收集柱(4),用于收集漂浮下来的微血管二维环形单元5。 进一步的,还包括基台(1),用于对培养皿(3)的支撑和定位。 较佳的,相邻两列小通孔之间变向阀(6)是一个整体或者是独立的多个变向阀 (6)。 较佳的,培养液的液面高度不低于培养皿(3)的75%。 一种基于气泡驱动的环状微单元阵列化组装系统的组装方法,包括如下步骤: 步骤1、左进气管(2)和右进气管(7)处于常闭状态,变向阀(6)处于伸直状态; 步骤2、打开左进气管(2)的控制阀,对培养皿(3)的下腔室内通压缩气体; 步骤3、生成的气泡推动底部的微血管二维环形单元(5)向上升起直至培养液顶 端; 步骤4、设定时间后即停止通气; 步骤5、待所有的微血管二维环形单元(5)下落高度低于收集柱(4)顶端时,打开右 进气管(7)的控制阀,对下腔室进行通压缩气体; 步骤6、设定时间后即停止通气,关闭右进气管(7)控制阀,打开左进气管(2)的控 制阀; 步骤7、重复步骤2-6,直至大部分微血管二维环形单元(5)完成收集和组装。 本发明具有如下有益效果: 本发明提出的一种气泡驱动的环状微单元阵列化组装系统及方法,利用左右通气 管和变向阀在培养皿的小孔阵列上交替地产生气泡,培养液中上升的气泡推动均匀分布在 培养液底部的微血管二维环形单元,微血管二维环形单元在气泡的推动下升至培养液顶 部,停止供气后,在重力的作用下又缓慢下落,一部分随机落至收集柱上,反复这个过程,实 现微血管的自动组装。就目前主要的微血管二维环形单元的装配方法,对比机械接触式操 作,本发明没有对微血管二维环形单元的释放过程,因此避免了微观物体之间的粘附力影 响,由于没有出现较大的操作力,不存在损伤微血管的可能性,最重要的是整个操作平台原 理简单,相比较而言成本优势巨大;对比微流控芯片的组装方式,由于可抓取多种直径的微 血管二维环形单元,同时简单的结构带来极低的故障可能性,本发明有较广的适用性和稳 定性。 附图说明 图1为本发明实施方式的一种气泡驱动的环状微单元阵列化组装系统结构图; 图2(a)为本发明实施方式的一种气泡驱动的环状微单元阵列化组装系统初始状 态示意图;图2(b)为本发明实施方式的一种气泡驱动的环状微单元阵列化组装系统左侧通 气示意图;图2(c)为本发明实施方式的一种气泡驱动的环状微单元阵列化组装系统右侧通 气示意图; 其中,1-基台,2-左进气管、3-培养皿、4-收集柱、5-微血管二维环形单元、6-变向 4 CN 111575183 A 说 明 书 3/4 页 阀、7-右进气管。











