
技术摘要:
本发明实施例提供的基于空气动力学的无人机信息收集方法及装置,其中方法包括:根据风场分布、第一目标点的位置、第一目标点的信息大小的对应关系,规划无人机出航轨迹,将无人机出航轨迹上载至无人机,控制无人机按照出航轨迹,以出航飞行姿态,从第一目标点采集信息 全部
背景技术:
目前无人机数据采集平台可以为用户提供定制化的信息采集服务。用户只需要定 义任务的区域范围及提交已采集信息的要求,无人机数据采集平台会将自动地规划任务, 使用无人机完成信息采集。 传统的无人机为了完成信息采集,无论是从无人机信息采集中能量、能效或者时 效的角度出发,都会假设无人机高度不变,从而将原三维空间轨迹规划问题转化成二维平 面的路径规划问题。传统的无人机信息采集信息的方法具体说明如下: 首先,在上述假设前提下进行无人机建立理论模型,推导出关于无人机速度、加速 度和角度等理论模型,并得到与能耗、时效或能量效率有关的基础函数,如推力、功率等。 其次,根据上述基础函数以及基于理论模型,忽略信号处理等电量能量消耗,并根 据不同的研究目标,建立关于无人机飞行过程中的能耗、时效或者能量效率的目标函数。其 中,所述能量效率定义为在有限时间范围内由无人机推进能量消耗标准化的通信总信息 位。 再次,若针对多节点信息采集,在考虑信息采集起始位置的同时,还优化多节点信 息采集顺序来提高信息时效,由目标函数解得无人机的起始位置信息与路径顺序;若针对 单节点信息采集,优化能量效率时,考虑在二维平面中无人机的轨迹对传输速率的影响,进 而由目标函数解得无人机的轨迹使得无人机在节点附近采集信息时的能量效率最大化。 最后,无人机按照无人机的轨迹,飞向节点,完成信息采集。 在上述方法中,无人机在信息采集时,通过优化无人机在信息采集时的能量效率, 来使得无人机任务完成的能量效率最大化。但是,无人机会处于实际的应用环境中飞行,完 成信息采集,除了以上无人机自身因素影响无人机飞行以外,无人机还会与实际的应用环 境相互作用,也会影响无人机飞行。因此,上述无人机的飞行只考虑了无人机自身因素,不 符合无人机实际的飞行情况。并且,上述方法执行的前提是无人机以固定高度水平飞行,也 不符合无人机实际的飞行情况。 由此可知,上述方法中无人机的飞行不符合无人机实际的飞行情况,因此无人机 在完成信息采集任务时所使用的能量消耗不符合实际的应用环境的能量消耗,那么上述优 化无人机在信息采集时的能量效率会存在偏差。
技术实现要素:
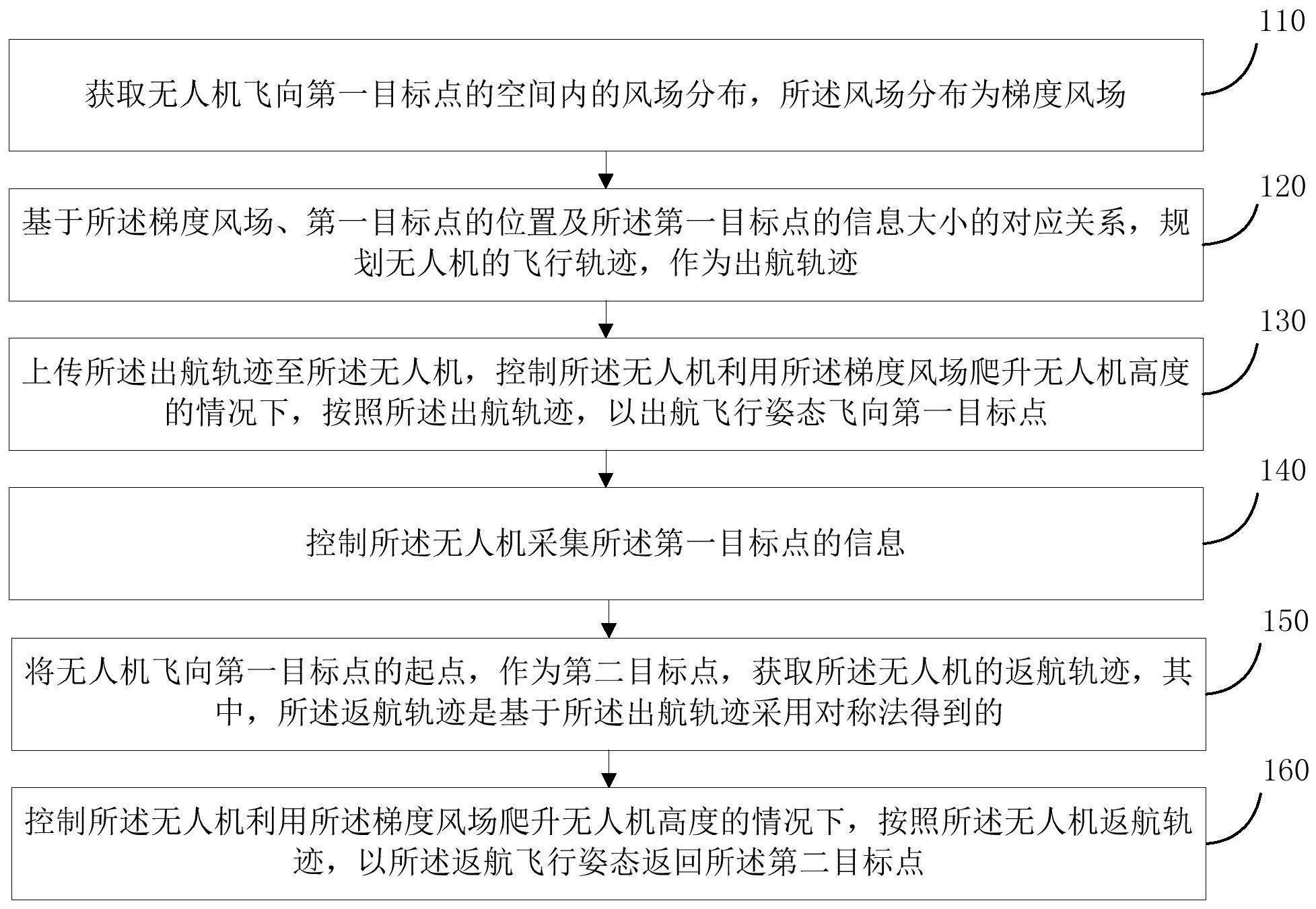
本发明实施例的目的在于提供的基于空气动力学的无人机信息收集方法及装置, 用以解决现有技术中优化无人机在信息采集时的能量效率会存在偏差的技术问题。具体技 术方案如下: 5 CN 111580533 A 说 明 书 2/15 页 第一方面,本发明实施例提供了一种基于空气动力学的无人机信息收集方法,包 括: 获取无人机飞向第一目标点的空间内的风场分布,所述风场分布为梯度风场; 基于所述梯度风场、第一目标点的位置及所述第一目标点的信息大小的对应关 系,规划无人机的飞行轨迹,作为出航轨迹; 上传所述出航轨迹至所述无人机,控制所述无人机利用所述梯度风场爬升无人机 高度的情况下,按照所述出航轨迹,以出航飞行姿态飞向第一目标点; 控制所述无人机采集所述第一目标点的信息。 进一步的,所述出航飞行姿态中的相对航向角的解空间服从高斯分布,均值为所 述第一目标点相对于所述无人机机体的角度,方差与无人机和所述第一目标点之间的距离 成正比;所述出航飞行姿态中的相对俯仰角服从均匀分布,并以所述无人机当前位置为原 点,所述第一目标点的通信范围呈现出来的最大俯仰角作为相对俯仰角的上界,所述第一 目标点的通信范围在无人机视角所呈现的最大俯仰角作为相对俯仰角的下界。 进一步的,所述基于所述梯度风场、第一目标点的位置及所述第一目标点的信息 大小的对应关系,规划无人机的飞行轨迹,作为出航轨迹,包括: 对无人机飞向第一目标点的空间内的多条轨迹进行离散,得到离散化的轨迹段, 所述离散化的轨迹段是由多个离散范围内中同一离散范围的多段离散化的轨迹段组成,所 述离散范围是对轨迹进行离散时,每两个相邻离散点之间的空间范围; 基于所述梯度风场与所述无人机的出航飞行姿态之间的对应关系,确定即将处于 所述离散化的轨迹段上的无人机飞行能量消耗; 选择每个离散范围内,能量消耗最小的轨迹段; 将所有能量消耗最小的轨迹段进行拼接,得到能量消耗最小的轨迹,作为所述出 航轨迹。 进一步的,所述基于所述梯度风场与所述无人机的出航飞行姿态之间的对应关 系,确定即将处于所述离散化的轨迹段上的无人机飞行能量消耗,包括: 采用所述梯度风场与所述无人机的出航飞行姿态,建立的最优解求解函数,确定 即将处于所述离散化的轨迹段上的无人机飞行能量消耗:其中,所述最优解求解函数如下: 其中, 为无人机的相对航向角,所述相对航向角与风场方向相对, 为无人机的 航向角,φa为无人机的相对横滚角,γa为无人机的相对俯仰角,γ为无人机的俯仰角,a表 示相对,Va为在所述无人机体系下的无人机相对于空气的速度,E为无人机飞行能耗,Tn为无 人机的动力,所述无人机的动力方向与机头方向一致,Sn为离散后每一段轨迹长度,n为离 散化轨迹序号,m为无人机质量,V为在所述无人机体系下的无人机速度,W*为风场因子,t为 时间,g为重力加速度,φ为无人机横滚角,xn为离散化轨迹在地面坐标系中x轴上的投影,D 6 CN 111580533 A 说 明 书 3/15 页 为阻力,所述阻力的方向与无人机的动力方向相反。 进一步的,所述控制所述无人机采集所述第一目标点的信息,包括: 控制所述无人机按照所述无人机的采集飞行姿态,进入无人机通信范围的半球体 内,采集所述第一目标点的信息,其中,所述采集飞行姿态中的相对航向角的解空间服从高 斯分布,均值为所述无人机所在的俯视面圆内弦的方向,方差与所述俯视面圆的圆心距离 成反比,所述采集飞行姿态中的相对俯仰角的解空间服从均匀分布,并且所述无人机的相 对俯仰角的下界为当前航向角方向所在的竖直平面与地面通信范围边界的交点相对于无 人机当前位置的俯仰角。 进一步的,所述控制所述无人机采集所述第一目标点的信息,包括: 采用视距信道,通过如下公式确定的无人机的传输速率,控制所述无人机采集所 述第一目标点的信息: 其中, R(t)为在所述无人机通信范围内的无人机传输 速率,t为时间,B为信道带宽,P为无人机发射功率,β0为单位距离信道功率,δ为无人机的高 斯白噪声,δ为常数,d(t)为所述无人机与第一目标点的传输距离,dmax为所述无人机与第一 目标点的最大传输距离,Rmin为在所述无人机通信范围内,在传输速率为常量,且为最大传 输距离dmax时的无人机传输速率。 进一步的,在所述控制所述无人机采集所述第一目标点的信息之后,所述方法还 包括: 将无人机飞向第一目标点的起点,作为第二目标点,获取所述无人机的返航轨迹, 其中,所述返航轨迹是基于所述出航轨迹采用对称法得到的; 控制所述无人机利用所述梯度风场爬升无人机高度的情况下,按照所述无人机返 航轨迹,以所述返航飞行姿态返回所述第二目标点;其中,所述返航飞行姿态中的相对航向 角的解空间服从高斯分布,均值为所述第二目标点相对于所述无人机机体的角度,方差与 所述无人机和所述第二目标点之间的距离成正比,所述返航飞行姿态中的相对俯仰角服从 高斯分布,均值为所述第二目标点相对于所述无人机机体的角度,方差与无人机和所述第 二目标点之间的距离成正比。 第二方面,本发明实施例提供的一种基于空气动力学的无人机信息收集装置,包 括: 获取模块,用于获取无人机飞向第一目标点的空间内的风场分布,所述风场分布 为梯度风场; 规划模块,用于基于所述梯度风场、第一目标点的位置及所述第一目标点的信息 大小的对应关系,规划无人机的飞行轨迹,作为出航轨迹; 第一处理模块,用于上传所述出航轨迹至所述无人机,控制所述无人机利用所述 梯度风场爬升无人机高度的情况下,按照所述出航轨迹,以出航飞行姿态飞向第一目标点; 第一控制模块,用于控制所述无人机采集所述第一目标点的信息。 7 CN 111580533 A 说 明 书 4/15 页 进一步的,所述出航飞行姿态中的相对航向角的解空间服从高斯分布,均值为所 述第一目标点相对于所述无人机机体的角度,方差与无人机和所述第一目标点之间的距离 成正比;所述出航飞行姿态中的相对俯仰角服从均匀分布,并以所述无人机当前位置为原 点,所述第一目标点的通信范围呈现出来的最大俯仰角作为相对俯仰角的上界,所述第一 目标点的通信范围在无人机视角所呈现的最大俯仰角作为相对俯仰角的下界。 进一步的,所述规划模块,具体用于: 对无人机飞向第一目标点的空间内的多条轨迹进行离散,得到离散化的轨迹段, 所述离散化的轨迹段是由多个离散范围内中同一离散范围的多段离散化的轨迹段组成,所 述离散范围是对轨迹进行离散时,每两个相邻离散点之间的空间范围; 基于所述梯度风场与所述无人机的出航飞行姿态之间的对应关系,确定即将处于 所述离散化的轨迹段上的无人机飞行能量消耗; 选择每个离散范围内,能量消耗最小的轨迹段; 将所有能量消耗最小的轨迹段进行拼接,得到能量消耗最小的轨迹,作为所述出 航轨迹。 第三方面,本发明实施例提供了一种电子设备,包括处理器、通信接口、存储器和 通信总线,其中,处理器,通信接口,存储器通过通信总线完成相互间的通信; 存储器,用于存放计算机程序; 处理器,用于执行存储器上所存放的程序时,实现第一方面所述的方法步骤。 本发明实施例有益效果: 本发明实施例提供的基于空气动力学的无人机信息收集方法及装置,通过考虑应 用环境中风场分布,风场分布为梯度风场,在风场分布已知的条件下,根据风场分布、第一 目标点的位置、第一目标点的信息大小的对应关系,规划无人机出航轨迹,将无人机出航轨 迹上载至无人机,控制无人机按照出航轨迹,以出航飞行姿态,从第一目标点采集信息。这 样考虑应用环境中的风场分布对无人机的出航飞行轨迹的影响,无人机在完成信息采集任 务时的能量消耗相较于现有技术更符合实际的应用环境的能量消耗,并且在无人机按照出 航轨迹,以出航飞行姿态飞向第一目标点的过程中,使用梯度风场爬升无人机的高度,减少 无人机本身的能量消耗,使得无人机采集信息过程中的能量消耗最小,这样减少优化无人 机在信息采集时的能量效率的偏差。 当然,实施本发明的任一产品或方法并不一定需要同时达到以上所述的所有优 点。 附图说明 为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现 有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本 发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以 根据这些附图获得其他的附图。 图1为本发明实施例提供的基于空气动力学的无人机信息收集方法的第一流程示 意图; 图2为本发明实施例提供的基于空气动力学的无人机信息收集方法的第二流程示 8 CN 111580533 A 说 明 书 5/15 页 意图; 图3为本发明实施例的1M(兆)数据包且风幅为0时无人机轨迹图; 图4为本发明实施例的1M(兆)数据包且风幅为1.5时无人机轨迹图; 图5为本发明实施例的1M(兆)数据包且风幅为1.5时无人机信息采集轨迹图; 图6为本发明实施例的10M(兆)数据包且风幅为0时无人机轨迹图; 图7为本发明实施例的10M(兆)数据包且风幅为1.5时无人机轨迹图; 图8为本发明实施例的10M(兆)数据包且风幅为1.5时无人机信息采集轨迹图; 图9为本发明实施例的在不同风幅下无人机能耗对比图; 图10为本发明实施例提供的基于空气动力学的无人机信息收集装置的结构示意 图; 图11为本发明实施例提供的电子设备的结构示意图。











