
技术摘要:
本发明涉及一种雷达复合探测目标能力的检测方法,属于雷达复合探测目标能力的检测方法技术领域。包括以下检测步骤:1)检测环境要求:设置在海面或湖面等水面环境,周边15‑30Km范围内无其它水面船舶、岛屿目标或相关电磁设备装置;2)检测设备器材配置:检测中需要配置 全部
背景技术:
为适应日益复杂的应用环境,需要不断改进提高雷达的技术性能,增强对目标的 有效探测能力,其中优化雷达探测方式就是有效的手段之一。雷达复合探测可按照需求采 用主动方式、被动方式或主被动复合方式,复合探测方式能较好适应复杂的应用环境,提高 探测发现与选择目标的能力。由于雷达复合探测设计的实际环境异常复杂,对目标的电磁 特性也有着特殊要求,不同探测方式需要对应的应用环境,现实当中很难找到这样环境来 检验其有效性能,无法满足雷达复合探测实际能力的检测需求。
技术实现要素:
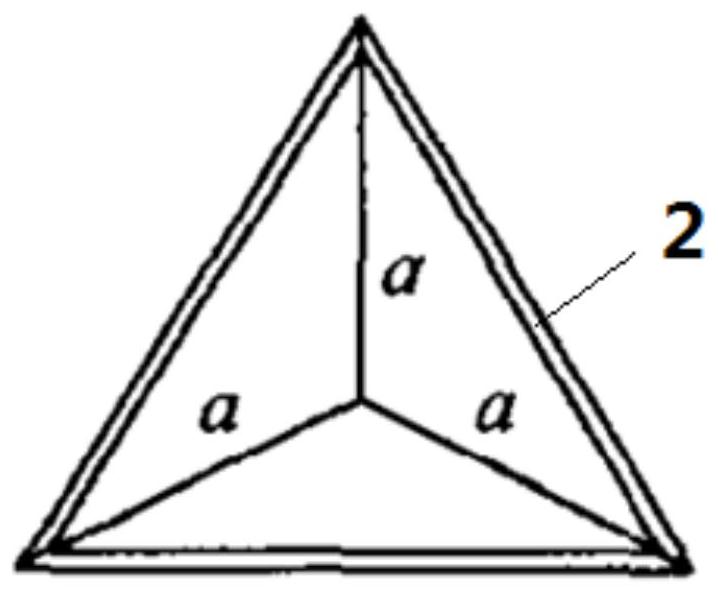
针对现有技术的不足,本发明提供一种雷达复合探测目标能力的检测方法,对此, 设计出一种相对简便且易于实现的方法来检测雷达复合探测能力,有效解决了雷达复合探 测能力检测对环境和目标特性要求较高且现实无法找到的困难,满足雷达复合探测实际能 力的检测需求,为雷达的实际应用打下基础。该方法具有针对性强,通用性好,设备器材配 套易于实现和检测环境要求简单的优势。 一种雷达复合探测目标能力的检测方法,其特殊之处在于: 1、检测环境要求 设置在海面或湖面等水面环境,要求水面区域开阔,周边15-30Km范围内无其它水 面船舶、岛屿目标或相关电磁设备装置; 2、检测设备器材配置 检测工作需要配置模拟检测目标及其装载的电磁辐射设备和相关器材,相关配套 设备器材如下: (1)模拟目标 检测中需要配置三个雷达模拟检测的水上移动目标,分别为目标M、目标A和目标 B,上述三个目标均采用小型船艇模拟,并在船艇上加装角反射器,提高RCS实现模拟800- 9000T的船舶目标,加装电磁辐射源来模拟目标装载的雷达设备,以此满足被测雷达对检测 目标的性能要求; 所述小型船艇采用大连欧伦船业有限公司生产的小型交通艇,该艇具备适航性 好、机动速度快、操纵灵活、改装与保障能力强的优势,主要性指标为:总长:23m、船宽:6m、 型深:2.76m、吃水:1.09米、航速:30Kn、满载排水量:52.5T、动力主机:2x CAT C32 1081kw (1450bhp)@2300rpm、辅机发电机:2x科勒25kw; 所述角反射器呈环形,是由多个单元角反射体2在直径2.5m的圆周支架上连续串 接构成,角反射体2是由等边三角形构成的三面体,圆周支架焊接于三角形支架3顶部,三角 6 CN 111596269 A 说 明 书 2/13 页 形支架3高度为3m,三角形支架3底部焊接于船艇顶部甲板上; 所述目标A、目标B分别加装被测雷达的RCS下限、RCS上限指标的角反射器,目标M 加装被测雷达的RCS均值指标的角反射器,角反射器的RCS取决于单元角反射体2,单元角反 射体2RCS计算模型如下面公式,单元角反射体2边长a通过该模型计算确定,公式中σ值对应 RCS,λ为被测雷达的波长; 其中:σ为雷达RCS,λ为雷达电磁波长,求得a; 所述电磁辐射源采用导航雷达,导航雷达按照小型船艇大小选择,目标A、目标M和 目标B分别按照小中大三类船舶选择导航雷达; 所述电磁辐射源的雷达天线安装在船艇主桅杆最高处,将雷达天线安装于天线支 架上,再将天线支架(含天线整体)焊接在主桅杆顶端即可; 所述导航雷达为取得IMO、认证常用的古野(FURUNO)船用导航雷达; 所述目标M的导航雷达型号为FR-1505、工作频率为9410±30MHz、最大功率6Kw、工 作距离0.25~24nm、辐射源天线XN12AF4ft、波束H1.8°、V25°、转速24-40rpm; 所述目标A的导航雷达型号为FR-2117、工作频率为9410±30MHz、最大功率12W、工 作距离0.5~35nm、辐射源天线XN20AF4ft,波束H1.23°、V20°,转速24rpm; 所述目标B的导航雷达型号为FR-2827W、工作频率为9410±30MHz、最大功率25Kw、 工作距离0.5~48nm、辐射源天线XN24AF4ft,波束H1.95°、V20°,转速21rpm; 3、雷达探测能力检测: 按照具备复合探测能力雷达的工作方式,分别对主动方式、被动方式和复合方式 下的雷达探测能力进行检测; 3.1雷达主动方式下探测能力检测 主动方式是被测雷达主动对外发射电磁波,再接收目标的反射回波来完成对目标 的探测识别和跟踪工作,该方式下目标RCS、动态间距变化会影响探测能力; 3.1.1检测场景配置 被测雷达1的主动有效探测距离为D1,将目标M设于有效探测距离内,目标A、目标B 配置在雷达1与目标M连线的垂直线上,且目标A、目标B设于目标M的左右两侧,目标A与目标 M之间的距离为a1,目标B与目标M之间的距离为b1,以此作为雷达检测的初始态势状态; a1、b1值为D1和雷达水平波束角α对应的侧向宽度Lc的2-3倍,采用下述计算公式 求得Lc 式中,α为雷达波束角,Dc取值D1; 3.1.2检测实施与结果判断 按照设计场景,主动探测方式是对雷达正常工作条件下对目标A、目标B、目标M有 效探测范围和对目标M的方位分辨能力进行检测,具体方法如下: 对目标有效探测范围检测: 7 CN 111596269 A 说 明 书 3/13 页 目标A、目标B、目标M分别以各自的初始位置为圆心,且以各自与雷达1的连线方向 为长轴作椭圆航线机动,椭圆航线的短轴为长轴长度的1/3,长轴长度分别为雷达1对各目 标检测发现的最远距离与最近距离之差; 检测结果:雷达1对目标A、目标B检测的最远距离越远,说明雷达1的主动探测能力 越好,雷达1对目标M的探测范围越大,说明雷达1发现预选目标的能力越强,由此可以得到 雷达1对其限定目标的主动有效探测能力; 对目标动态方位分辨跟踪能力检测: 目标A、B原地不动,目标M以初始位置为中心,以AB连线方向为航线进行倒“8”字形 机动,在目标M与目标A、目标B接近过程中,雷达1检测目标M与目标A、目标B的分辨间距越 小,说明雷达1的主动探测目标分辨跟踪能力越强; 3.2雷达被动方式下探测能力检测 雷达被动方式是被测雷达不发射电磁波,仅接收目标雷达辐射源的电磁波来完成 目标探测识别和跟踪工作,被测雷达被动方式所使用的设备是独立配置的,该方式下目标 雷达辐射源性能和目标机动与动态位置间距变化等对探测能力影响较大; 3.2.1检测场景配置 被测雷达1的被动有效探测距离为D2,将目标M设于有效探测距离内,目标A、目标B 配置在雷达1与目标M连线的垂直线上,且目标A、目标B设于目标M的左右两侧,目标A与目标 M之间的距离为a2,目标B与目标M之间的距离为b2,以此作为雷达检测的初始态势状态; a2、b2值为D2和目标A、目标B加装导航雷达的水平波束角α均值对应的侧向宽度Lc 的2-3倍,采用下述计算公式求得Lc 式中,α为目标A、B加装导航雷达的水平波束角,Dc取值D2; 3.2.2检测实施与结果判断 按照设计场景,主动探测方式主要对雷达正常工作条件下对A、B、M目标有效探测 范围和对M的方位分辨能力进行检测,具体方法如下: 对目标有效探测范围检测: 目标A、目标B导航雷达全程开机,目标A、目标B、目标M分别以各自的初始位置为圆 心,且以各自与雷达1的连线方向为长轴作椭圆航线机动,椭圆航线的短轴为长轴长度的1/ 3,长轴长度分别为雷达1对各目标导航雷达辐射电磁波检测发现的最远距离与最近距离之 差; 检测结果:雷达1对目标A、目标B检测的最远距离越远,说明雷达1的被动探测能力 越好,雷达1对目标M的探测范围越大,说明雷达1被动探测发现预选目标的能力越强,由此 可以得到雷达1对其限定目标的有效被动探测能力; 对目标动态方位分辨跟踪能力检测: 目标A、目标M、目标B导航雷达全程开机,目标A、目标B原地不动,目标M以初始位置 为中心,以AB连线方向为航线进行倒“8”字形机动,在目标M与目标A、目标B接近过程中,雷 达1检测目标M与目标A、目标B的分辨间距越小,说明雷达1的被动探测目标分辨跟踪能力越 强; 8 CN 111596269 A 说 明 书 4/13 页 3.3雷达复合方式下探测能力检测 雷达复合方式是被测雷达主动、被动通道同时工作,并且主、被动通道同时锁定目 标后才能完成目标识别和跟踪工作。该模式下目标的RCS及其加载的雷达辐射源设备均对 探测能力产生影响。 3.3.1检测场景配置 被测雷达1的复合有效探测距离为D3,将目标M设于有效探测距离内,目标A、目标B 配置在雷达1与目标M连线的垂直线上,且目标A、目标B设于目标M的左右两侧,目标A与目标 M之间的距离为a3,目标B与目标M之间的距离为b3,以此作为雷达检测的初始态势状态; a3、b3值为D3和目标A、目标B加装导航雷达的水平波束角均值α对应的侧向宽度Lc 的2-3倍,采用下述计算公式求得Lc 式中,α为目标A、B加装导航雷达的水平波束角,Dc取值D3; 3.3.2检测实施与结果判断 按照设计场景,复合探测方式主要对雷达正常工作条件下对目标A、目标B、目标M 有效探测范围和对目标M的方位分辨能力进行检测,具体方法如下。 对目标有效探测范围检测: 目标A、目标M、目标B导航雷达全程开机,目标A、目标B、目标M分别以各自的初始位 置为圆心,且以各自与雷达1的连线方向为长轴作椭圆航线机动,椭圆航线的短轴为长轴长 度的1/3,长轴长度分别为雷达1对各目标复合检测发现的最远距离与最近距离之差; 检测结果:雷达1对目标A、目标B检测的最远距离越远,说明雷达1的复合探测能力 越好,雷达1对目标M的探测范围越大,说明雷达1复合探测发现预选目标的能力越强,由此 可以得到雷达1对其限定目标的复合有效探测能力; 对目标动态方位分辨跟踪能力检测: 第一种检测,目标A、目标M、目标B导航雷达全程开机,目标A、目标B原地不动,目标 M以初始位置为中心,以AB连线方向为航线进行倒“8”字形机动,在目标M与目标A、目标B接 近过程中,雷达1检测目标M与目标A、目标B的分辨间距越小,说明雷达1的复合探测目标分 辨跟踪能力越强; 第二种检测,目标A、目标B导航雷达全程关机,目标M导航雷达全程开机,目标A、目 标B原地不动,目标M以初始位置为中心,以AB连线方向为航线进行倒“8”字形机动,在目标M 与目标A、目标B接近过程中,雷达1检测目标M与目标A、目标B的分辨间距越小,说明雷达1的 复合探测目标分辨跟踪能力越强。 本发明提出的雷达复合探测能力检测方法是改善提升雷达对复杂环境探测识别 和跟踪目标能力的有效手段,并为雷达开展探测目标态势的自动化信息处理创造了良好条 件,是目前提升雷达综合技术性能的方向之一。本发明基于实际环境下的雷达复合探测能 力检测,能产生如下主要效益。 (1)填补了外场环境下雷达复合探测能力检测的空白 本发明提出的基于模拟实际环境下对雷达复合探测能力的方法新颖,不仅能有效 模拟雷达的工作环境、目标分布条件和态势动态变化,而且能最大限度地覆盖雷达复合探 9 CN 111596269 A 说 明 书 5/13 页 测的主要工作方式,目前还没有类似相关的雷达复合检测方法和手段,有效填补了这一领 域的空白; (2)具备良好检测通用性和易用性 本发明在满足雷达检测要求条件下,采用成熟的技术和市场能够采购的通用材 料,技术难度较小,保障条件易于实现,便于复制应用,只要依照被检测雷达的性能指标数 据和工作方式,对应设置好相关的目标间隔参数即可。检测环境的水域条件宽泛,方便检测 设备搬运和场景搭建,有着较好的检测使用条件; (3)具有较好的经济、技术与使用效益 本发明有效解决了实验室环境下不能完成的雷达复合探测实际能力的检测工作, 检测得到的雷达实际探测能力具有重要意义,一方面可以帮助发现雷达技术设计与工艺制 造方面存在问题,明确改进方向,另一方面也能为用户提出针对性地使用方法建议,最大限 度地发挥雷达的有效技术性能。最后是本发明不需要大量特殊设备器材投入,很多保障条 件可以依靠市场租用方式解决,具备良好的综合使用效益。 附图说明 附图1本发明角反射体的结构示意图; 附图2角反射器组在支架上的布局图; 附图3安装角反射器与反射电磁信号覆盖示意图; 附图4雷达主动工作方式下的探测能力检测示意图; 附图5主动方式下雷达水平波束侧向宽度示意图普; 附图6雷达被动工作方式下探测能力示意图; 附图7被动方式下雷达水平波束侧向宽度示意图; 附图8雷达复合工作方式下探测能力示意图; 附图9复合工作方式下雷达水平波束侧向宽度示意图; 附图10雷达对目标有效探测范围检测目标机动航线示意图; 附图11雷达对目标动态方位分辨跟踪能力检测目标M的机动航线示意图。 图中:1、雷达;2、角反射体;3、三角形支架。











