
技术摘要:
本申请公开了一种调整卫星姿态的方法和相关装置,该方法包括:依据欧拉角和J2000坐标系下X轴的朝向向量计算卫星模型的头朝向目标向量;按照卫星模型的头朝向当前向量和头朝向目标向量调整卫星模型的头朝向;依据欧拉角和J2000坐标系下Y轴的朝向向量计算卫星模型的帆板 全部
背景技术:
卫星姿态是指卫星星体在轨道上运行所处的空间指向状态。直角坐标系的原点位 于卫星星体上,指向地面的Z轴反映偏航方向,Y轴反映俯仰方向,X轴反映滚转方向。卫星星 体在轨道上运行过程中,可以切换切向模式、对地模式、对日模式、对月模式等多种模式,在 卫星星体对应的卫星模型切换上述多种模式之后,可能会产生对X轴、Y轴和Z轴三轴的偏 移,为了能够保持切换模式后卫星模型的卫星姿态是正确的,需要基于对X轴、Y轴和Z轴三 轴的偏移调整卫星模型的卫星姿态。 一般的,调整物体姿态使用欧拉角和/或四元数,即,利用欧拉角和/或四元数调整 卫星姿态。但是,在使用欧拉角需要转换左右手系时,对于卫星模型的不同轴向来说转换公 式不一样,则利用欧拉角调整卫星姿态的方式较为复杂繁琐,且容易出现万向节锁死的问 题,无法轻易解决;四元数表示四维向量,对于卫星模型的三维向量而言,利用四元数调整 卫星姿态不够直观,不利于想象和观察。
技术实现要素:
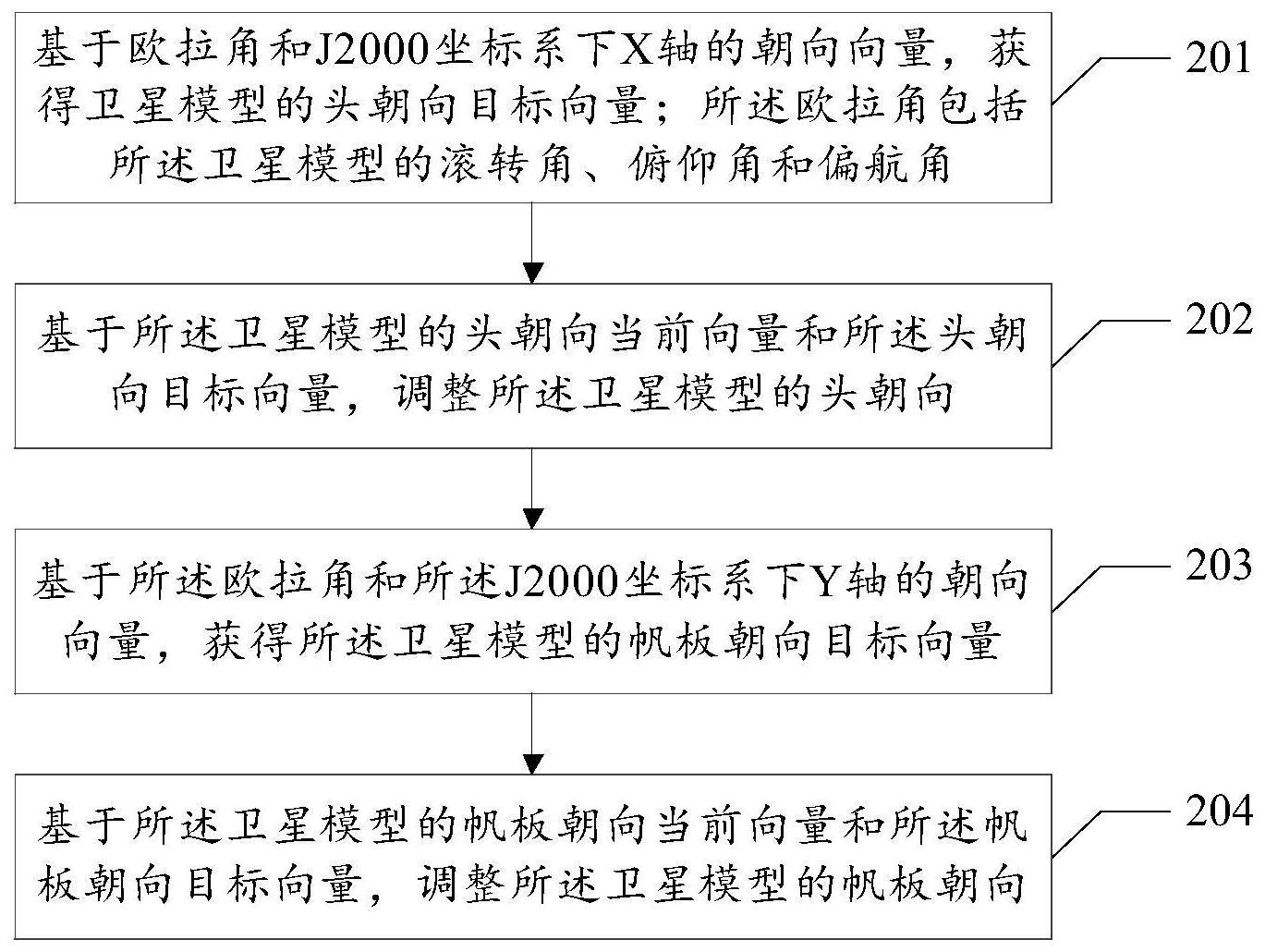
有鉴于此,本申请实施例提供一种调整卫星姿态的方法和相关装置,能够屏蔽基 于欧拉角和/或四元数调整卫星姿态的缺点,不仅调整方式直观形象,而且有效避免了万向 节锁死的情况。 第一方面,本申请实施例提供了一种调整卫星姿态的方法,所述方法包括: 基于欧拉角和J2000坐标系下X轴的朝向向量,获得卫星模型的头朝向目标向量; 所述欧拉角包括所述卫星模型的滚转角、俯仰角和偏航角; 基于所述卫星模型的头朝向当前向量和所述头朝向目标向量,调整所述卫星模型 的头朝向; 基于所述欧拉角和所述J2000坐标系下Y轴的朝向向量,获得所述卫星模型的帆板 朝向目标向量; 基于所述卫星模型的帆板朝向当前向量和所述帆板朝向目标向量,调整所述卫星 模型的帆板朝向。 可选的,所述基于欧拉角和J2000坐标系下X轴的朝向向量,获得卫星模型的头朝 向目标向量,具体为: 将所述J2000坐标系下X轴的朝向向量绕所述欧拉角旋转后的向量作为所述卫星 模型的头朝向目标向量。 可选的,所述基于所述卫星模型的头朝向当前向量和所述头朝向目标向量,调整 所述卫星模型的头朝向,包括: 4 CN 111591472 A 说 明 书 2/8 页 基于所述头朝向当前向量和所述头朝向目标向量,获得所述头朝向当前向量与所 述头朝向目标向量之间的第一夹角角度; 根据所述第一夹角角度直接调整所述卫星模型的头朝向。 可选的,所述基于所述欧拉角和所述J2000坐标系下Y轴的朝向向量,获得所述卫 星模型的帆板朝向目标向量,具体为: 将所述J2000坐标系下Y轴的朝向向量绕所述欧拉角旋转后的向量作为所述卫星 模型的帆板朝向目标向量。 可选的,所述基于所述卫星模型的帆板朝向当前向量和所述帆板朝向目标向量, 调整所述卫星模型的帆板朝向,包括: 基于所述帆板朝向当前向量和所述帆板朝向目标向量,获得所述帆板朝向当前向 量与所述帆板朝向目标向量之间的第二夹角角度; 基于所述卫星模型的Y轴位置值和所述第二夹角角度,调整所述卫星模型的帆板 朝向。 可选的,所述基于所述卫星模型的Y轴位置值和所述第二夹角角度,调整所述卫星 模型的帆板朝向,具体为: 若所述卫星模型的Y轴位置值大于0,根据180°与所述第二夹角角度的差值角度调 整所述卫星模型的帆板朝向。 可选的,所述基于所述卫星模型的Y轴位置值和所述第二夹角角度,调整所述卫星 模型的帆板朝向,具体为: 若所述卫星模型的Y轴位置值小于等于0,根据180°与所述第二夹角角度的加和角 度调整所述卫星模型的帆板朝向。 第二方面,本申请实施例提供了一种调整卫星姿态的装置,所述装置包括: 第一获得单元,用于基于欧拉角和J2000坐标系下X轴的朝向向量,获得卫星模型 的头朝向目标向量;所述欧拉角包括所述卫星模型的滚转角、俯仰角和偏航角; 第一调整单元,用于基于所述卫星模型的头朝向当前向量和所述头朝向目标向 量,调整所述卫星模型的头朝向; 第二获得单元,用于基于所述欧拉角和所述J2000坐标系下Y轴的朝向向量,获得 所述卫星模型的帆板朝向目标向量; 第二调整单元,用于基于所述卫星模型的帆板朝向当前向量和所述帆板朝向目标 向量,调整所述卫星模型的帆板朝向。 第三方面,本申请实施例提供了一种终端设备,所述终端设备包括处理器以及存 储器: 所述存储器用于存储程序代码,并将所述程序代码传输给所述处理器; 所述处理器用于根据所述程序代码中的指令执行上述第一方面任一项所述的调 整卫星姿态的方法。 第四方面,本申请实施例提供了一种计算机可读存储介质,所述计算机可读存储 介质用于存储程序代码,所述程序代码用于执行上述第一方面任一项所述的调整卫星姿态 的方法。 与现有技术相比,本申请至少具有以下优点: 5 CN 111591472 A 说 明 书 3/8 页 采用本申请实施例的技术方案,首先,依据欧拉角和J2000坐标系下X轴的朝向向 量计算卫星模型的头朝向目标向量;欧拉角包括卫星模型的滚转角、俯仰角和偏航角;其 次,按照卫星模型的头朝向当前向量和头朝向目标向量调整卫星模型的头朝向;然后,依据 欧拉角和J2000坐标系下Y轴的朝向向量计算卫星模型的帆板朝向目标向量;最后,按照卫 星模型的帆板朝向当前向量和帆板朝向目标向量调整卫星模型的帆板朝向。由此可见,先 计算卫星模型的头朝向目标向量,在卫星模型的头朝向当前向量的基础上,采用向量法调 整卫星模型的头朝向,再计算卫星模型的帆板朝向目标向量,在卫星模型的帆板朝向当前 向量的基础上,采用向量法调整卫星模型的帆板朝向,向量法能够屏蔽基于欧拉角和/或四 元数调整卫星姿态的缺点;先调整卫星模型的头朝向再调整卫星模型的帆板朝向,不仅调 整方式直观形象,而且有效避免了万向节锁死的情况。 附图说明 为了更清楚地说明本申请实施例的技术方案,下面将对本申请实施例描述中所需 要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请中记载的一些 实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附 图获得其它的附图。 图1为本申请实施例中一种应用场景所涉及的系统框架示意图; 图2为本申请实施例提供的一种调整卫星姿态的方法的流程示意图; 图3为本申请实施例提供的一种卫星姿态调整前卫星模型示意图; 图4为本申请实施例提供的一种调整卫星姿态的装置的结构示意图。











