
技术摘要:
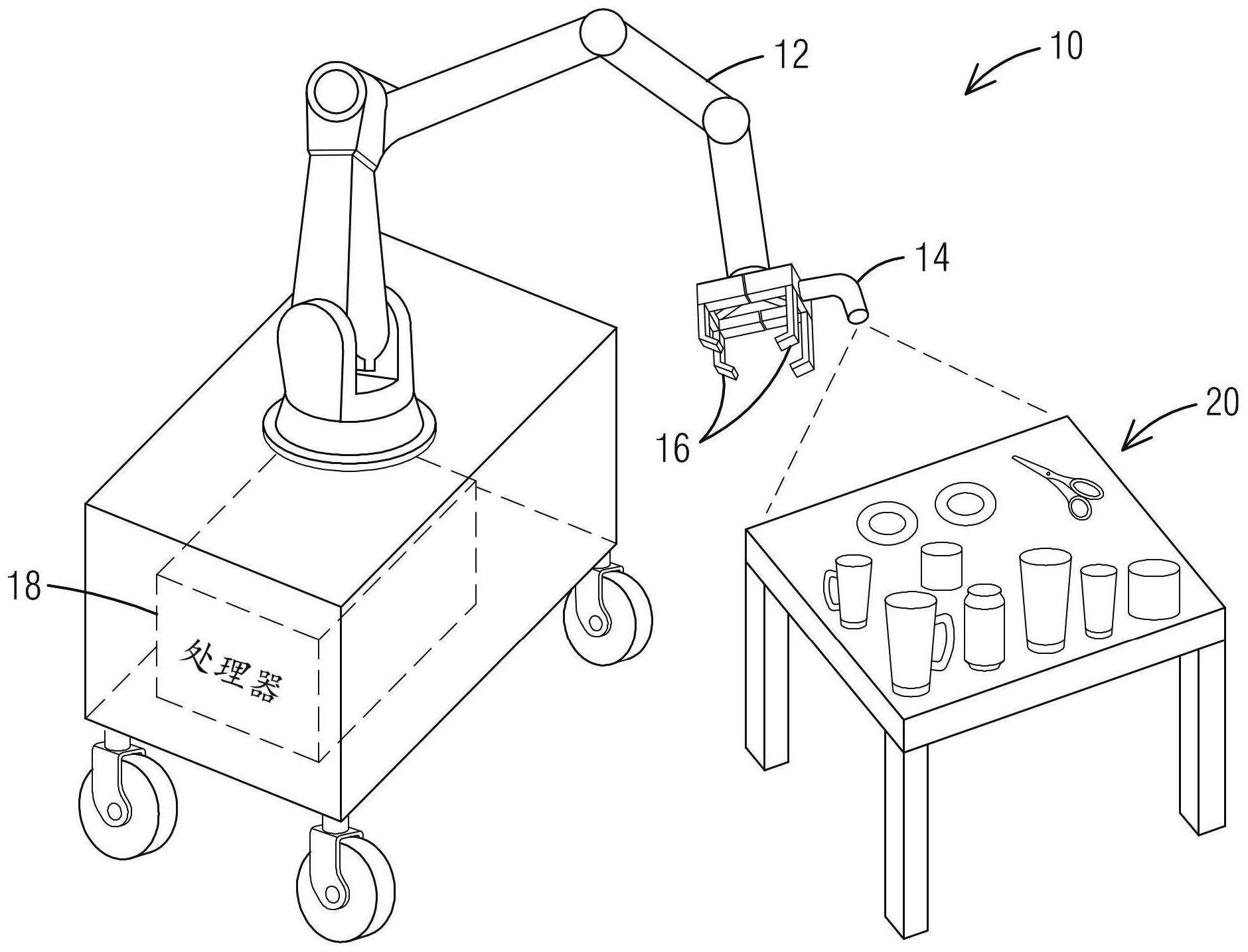
本发明提供了计算机化的系统及方法。机器人操纵器(12)布置为抓取对象(20)。抓具(16)附接到该机器人操纵器(12),其包括成像传感器(14)。在机器人操纵器(12)运动期间,该成像传感器(14)布置为捕获提供机器人操纵器的环境中的对象的不同视图的图像。处理器(18)布置为基于 全部
背景技术:
任务自动化越来越多通过机器人执行,任务例如在工业环境中,例如可能涉及组 装,仓库库存,包装;或者,在家庭自动设置以及可能使用自主系统的其他设置中。实践证 明,机器人在执行重复性任务时不需要或几乎不需要用户干预,也很有效。为了经济高效且 可靠地实现此类任务,必须解决的一项挑战涉及机器人对对象的拾取和处理。 某些已知方法可能涉及精确定位每个机器人以及对每个机器人位置详细编程以 抓取对象,并且该定位通常必须由机器人控制器先验知道。因此,必须为给定机器人要处理 的每个新对象重写或调整控制算法。这仅适用于通过类似程序的机器人进行批量生产或重 复处理相同的对象。 某些替代性已知方法可能涉及要处理的每个对象的计算机辅助设计(CAD)文件或 其他模型信息,目的是使过程自动查找合适的拾取位置(也称为抓取)。但是,这种方法在灵 活、动态变化的环境中不可行,例如在仓库应用中通常是这样,人们可以期望成千上万甚至 数百万个不同且不断变化的对象,或者在家庭自动化应用中,机器人必须处理在算法设计、 训练和验证期间可能未知的对象。 可以预期,在任何受工业4.0启发的灵活生产设施中都会出现类似的情况,例如, 旨在提高:生产率(例如,通过大大减少从开发新产品到交付给市场客户的时间);效率(例 如,自动化允许更大的灵活性,更好的产品质量和更高效的生产);以及节能(例如,减少执 行机器人任务的时间),从而减少了用于执行此类任务的电能的使用。对于涉及用于抓取库 存系统的库存物品的机械臂的一个库存系统的一个示例,请参见美国专利9,914,213。
技术实现要素:
公开的实施例涉及一种计算机化的方法。在布置成抓取机器人操纵器的环境中的 对象的机器人操纵器的运动期间,可以用机器人操纵器的成像传感器捕获图像。图像可以 提供机器人操纵器的环境中的对象中的一个或多个对象的不同视图的图像。基于由所捕获 的图像提供的不同视图,可以寻找候选抓取位置,以执行对机器人操纵器的环境中的对象 中的一个或多个对象中的相应对象的抓取。可以为候选抓取位置计算指示抓取质量的相应 值。基于所计算的指示候选抓取位置的抓取质量的相应值,选择可能导致成功抓取机器人 操纵器的环境中的对象中的一个或多个对象中的相应对象的抓取位置和轨迹。命令机器人 操纵器沿着所选择的轨迹运动以到达所选择的抓取位置。 另一公开的实施例涉及一种计算机化的系统。机器人操纵器可以布置为抓取机器 5 CN 111571581 A 说 明 书 2/6 页 人操纵器的环境中的对象。机器人操纵器包括成像传感器。抓具附接到机器人操纵器。在机 器人操纵器的运动期间,成像传感器可以布置为捕获提供机器人操纵器的环境中的对象中 的一个或多个对象的不同视图的图像。处理器可以配置为基于捕获的图像提供的不同视 图,寻找候选抓取位置,以执行对机器人操纵器的环境中的对象中的一个或多个对象中的 相应对象的抓取。处理器配置为计算指示候选抓取位置的抓取质量的相应值。基于所计算 的指示候选抓取位置的抓取质量的相应值,所述处理器配置为选择可能导致成功抓取机器 人操纵器的环境中的一个或多个对象中的相应对象的抓取位置和轨迹。处理器还配置为命 令机器人操纵器沿着所选择的轨迹运动以到达所选择的抓取位置。 附图说明 图1示出了所公开的计算机化的系统的一个非限制性实施例的示意图,该计算机 化的系统涉及用于拾取对象的机器人操纵器。 图2至图5示出了各自的流程图,其描绘了用于自动拾取对象的公开的计算机化的 方法中可能所涉及的动作或步骤的工作流程的非限制性实施例。 图6示出了给定对象诸如咖啡杯的一系列不同视图的非限制性示例。 图7和图8分别示出了用于抓取咖啡杯的非限制性流程。 图9示出了咖啡杯被拾取的非限制性的抓取事件。所述抓取事件是由图7和图8所 示的流程产生的。











