
技术摘要:
本发明提供一种隐含结构光的解码方法及装置,该方法包括:对摄像头拍摄的图像进行遍历,获取每个像素点的灰度值和理想邻域灰度分布;根据像素点的灰度值和理想邻域灰度分布,结合预设的输出图像完成条纹提取并输出更新完成的输出图像;对更新完成的输出图像中的条纹中 全部
背景技术:
投影式人机交互技术一般以投影仪和摄像头为依托,来识别所投影区域内人手的 动作,从而实现信息交互的目的。一种投影式人机交互系统利用人眼的视觉暂留,采用投影 仪投影高速(一般大于120Hz)的隐含结构光(是通过向被测空间投射特定纹理来简化匹配 像素搜索的一种技术,结构光隐藏于投影界面的奇偶帧中),摄像头同步采集奇偶帧界面图 像,然后对奇偶帧图像进行差值,获取结构光信息(即提取条纹),最后利用该信息实时完成 对交互过程中手与指尖的位置、投影面的位置准确测量,实现准确的手势与指尖触摸判断, 从而实现投影式人机交互的准确判断。 针对该投影人机交互系统,考虑到其实时性要求,该系统无法使用时间编码的结 构光图像,只能采用空间编码方式的结构光图像(空间编码结构光是指对光场中空间阵列 分布方式进行数学编码的结构光)。而在空间编码方式中,常见的颜色编码会因为投影仪的 分时投影原理使得投影界面闪烁,其他编码方式会因为图案的复杂性降低隐含效果。因此, 在隐含结构光技术本身的苛刻要求下,需要用尽可能简单的图案进行解码,如单向条纹。然 而,这种简单的图案由于信息少于一般图案,难以准确解码。 基于此,现有技术提出一些方法针对结构光图像的条纹提取,其通常是重心法(找 灰度分布的重心)、几何中心法(找条纹的边界点并求出这两点的中点作为几何中心)、高斯 拟合法(求取高斯曲线拟合结果的极值点)和Steger算法(利用Hessian矩阵绝对值最大的 特征值对应的特征向量,给出各点的法线方向,对条纹各点像素的灰度分布函数沿着法线 方向进行二阶泰勒展开得到条纹中心)等手段来实现。现有的重心法和几何中心法仅利用 了简单的灰度关系,极易受到噪声的影响,高斯拟合法虽利用了条纹中心的灰度分布特性, 但拟合的方式鲁棒性差,对噪声极其敏感,Steger算法鲁棒性强,但其方法本身的缺陷导致 条纹边缘处处理效果差(存在多噪点),且实验显示该方法中提出的阈值计算方式在提取噪 声大的隐含结构光条纹时不够理想,存在大量的条纹丢失现象。因此,对于噪声较小的未偏 移条纹,这些方法没有太大的区别,但对于投影到交互的人手部而产生偏移的隐含条纹,由 于人手反射特性的不同,会引入大量的噪声,使上述方法在提取此类隐含条纹中心时会存 在较大的误差,导致对手、指尖的位置测量带来较大误差,从而影响系统对手势与指尖触摸 判断的准确度。此外,由于该投影式人机系统使用条纹作为结构光图像,投影到手上的条纹 会随着手的高度不同发生不同程度的偏移,甚至错位现象,还有可能发生条纹的丢失现象, 导致确定偏移条纹与结构光图像中条纹的对应关系存在较大难度的问题。 因此,目前对此类简单条纹的解码尚未有成熟鲁棒的解决方式。
技术实现要素:
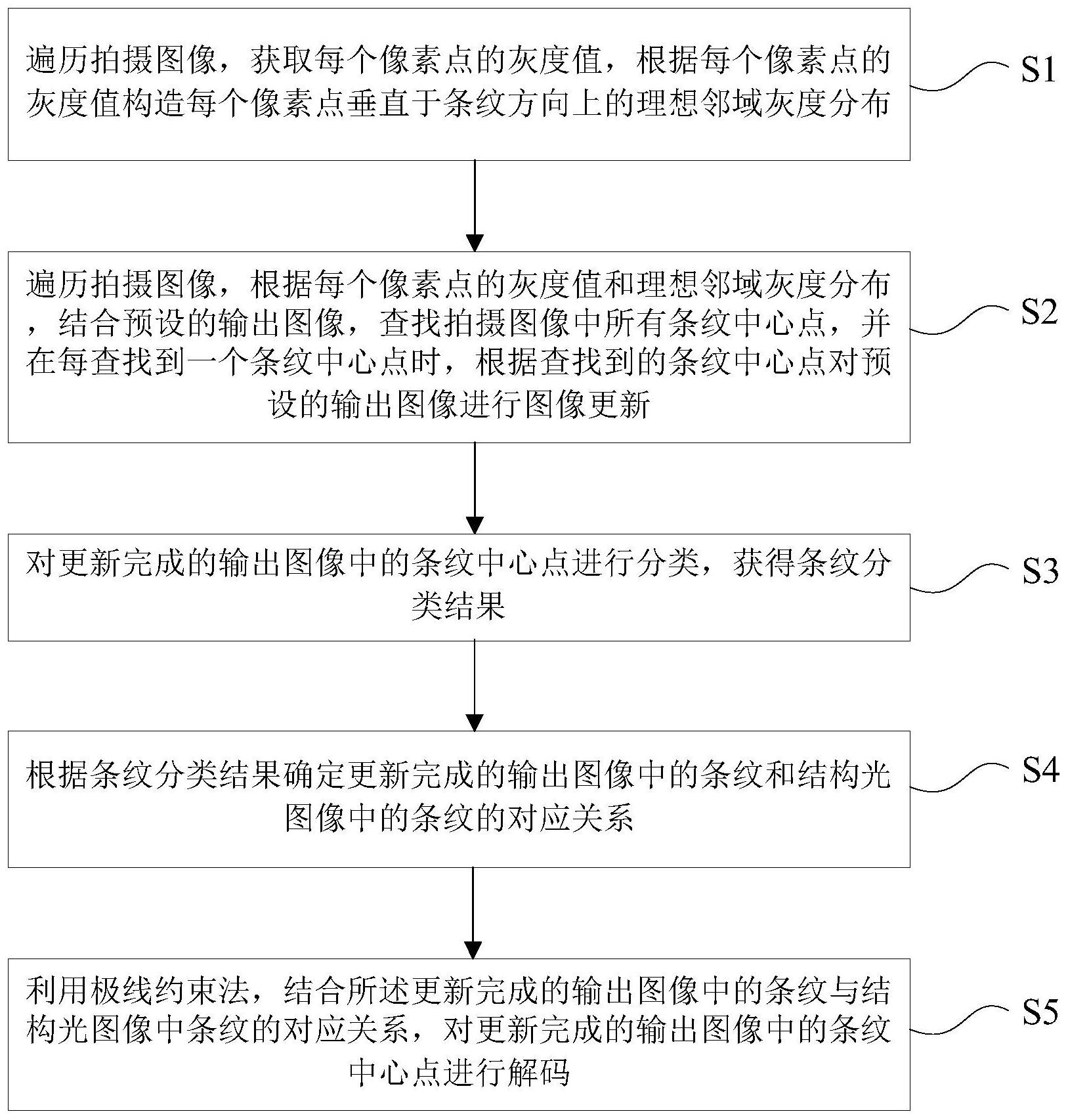
本发明实施例提供了一种隐含结构光的解码方法及装置,解决了现有技术中当前 5 CN 111582310 A 说 明 书 2/9 页 隐含结构光技术中存在的条纹提取鲁棒性差,且尚不存在成熟高效的条纹图案匹配方法的 技术问题。 本发明实施例提供了一种隐含结构光的解码方法,该方法包括: 遍历拍摄图像,获取每个像素点的灰度值,根据每个像素点的灰度值构造每个像 素点垂直于条纹方向上的理想邻域灰度分布; 遍历拍摄图像,根据每个像素点的灰度值和理想邻域灰度分布,结合预设的输出 图像,查找拍摄图像中所有条纹中心点,并在每查找到一个条纹中心点时,根据查找到的条 纹中心点对预设的输出图像进行图像更新; 对更新完成的输出图像中的条纹中心点进行分类,获得条纹分类结果; 根据条纹分类结果确定更新完成的输出图像中的条纹和结构光图像中的条纹的 对应关系; 利用极线约束法,结合所述更新完成的输出图像中的条纹和结构光图像中条纹的 对应关系,对更新完成的输出图像中的条纹中心点进行解码。 本发明实施例还提供了一种隐含结构光的解码装置,该装置包括: 遍历模块,用于遍历拍摄图像,获取每个像素点的灰度值,根据每个像素点的灰度 值构造每个像素点垂直于条纹方向上的理想邻域灰度分布; 条纹提取模块,用于遍历拍摄图像,根据每个像素点的灰度值和理想邻域灰度分 布,结合预设的输出图像,查找拍摄图像中所有条纹中心点,并在每查找到一个条纹中心点 时,根据查找到的条纹中心点对预设的输出图像进行图像更新; 条纹分类模块,用于对更新完成的输出图像中的条纹中心点进行分类,获得条纹 分类结果; 对应关系确定模块,根据条纹分类结果确定更新完成的输出图像中的条纹和结构 光图像中的条纹的对应关系; 解码模块,用于利用极线约束法,结合所述更新完成的输出图像中的条纹和结构 光图像中条纹的对应关系,对更新完成的输出图像中的条纹中心点进行解码。 本发明实施例还提供了一种计算机设备,包括存储器、处理器及存储在存储器上 并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述所述方 法。 本发明实施例还提供了一种计算机可读存储介质,所述计算机可读存储介质存储 有执行上述所述方法的计算机程序。 在一个实施例中,根据所拍摄图像中条纹中心点的灰度分布特征建立理想邻域灰 度分布,基于每行或每列每个像素点的灰度值和理想邻域灰度分布,结合预设的输出图像 判断当前像素点是否为条纹中心点,对提取了条纹的输出图像中所有条纹进行分类;根据 分类结果确定更新完成的输出图像中所有条纹和结构光图像中条纹的对应关系;利用极线 约束法,结合所述更新完成的输出图像中的条纹和结构光图像中条纹的对应关系,对所有 条纹中心点进行解码,与现有技术相比,本发明考虑了垂直于条纹和沿条纹方向上条纹中 心点特征,比以往方法更具有实用性和鲁棒性。本发明能在保证精度的基础上,高效且鲁棒 的实现对隐含结构光图像解码。 6 CN 111582310 A 说 明 书 3/9 页 附图说明 为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现 有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本 发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以 根据这些附图获得其他的附图。 图1是本发明实施例提供的一种隐含结构光的解码方法流程图; 图2是本发明实施例提供的一种对输出图像进行图像更新的部分流程; 图3是本发明实施例提供的一种判断是否为条纹中心点的流程图; 图4是本发明实施例提供的一种条纹提取效果图; 图5是本发明实施例提供的一种对输出图像进行分类和匹配的流程图; 图6是本发明实施例提供的一种利用对应条纹和极线约束的解码原理示意图; 图7是本发明实施例提供的一种利用对应条纹和极线约束的解码方法流程图; 图8是本发明实施例提供的一种隐含结构光的解码装置结构框图。











