
技术摘要:
本发明公开了一种基于不等焦距的双目视觉测距方法。本发明应用于基于两个不同焦距相机的双目测距,相对于传统的双目测距,该测距可以根据测量目标的距离的改变,来改变相机的焦距,使得测量目标在相机图像中处于一个清晰的状态,所测出深度信息也较为精确。相对于其他 全部
背景技术:
在计算机视觉发展迅猛的今天,获取深度信息仍旧是一个值得研究的课题,随着 诞生的算法也有不少,但每种算法都有相应的缺陷。目前比较成熟,应用面比较广的双目视 觉也不例外。常规的双目视觉获取深度信息一般采用两个相同型号且相同焦距的相机,这 个方法成本低,所获得深度信息准确度也较高,但是他有一个比较严格的要求,就是两个相 机的焦距必须保持一致,不然随意改变焦距。而与之对应的利用两个不同焦距的相机来获 取的 深度信息方法往往适用的范围比较窄,需要目标物介于两个相机之间。而本方法 则是一种适用范围比较广,可以覆盖两个相机的共同视野,两个相机的焦距可以进行改变, 不需要保持一致的方法。
技术实现要素:
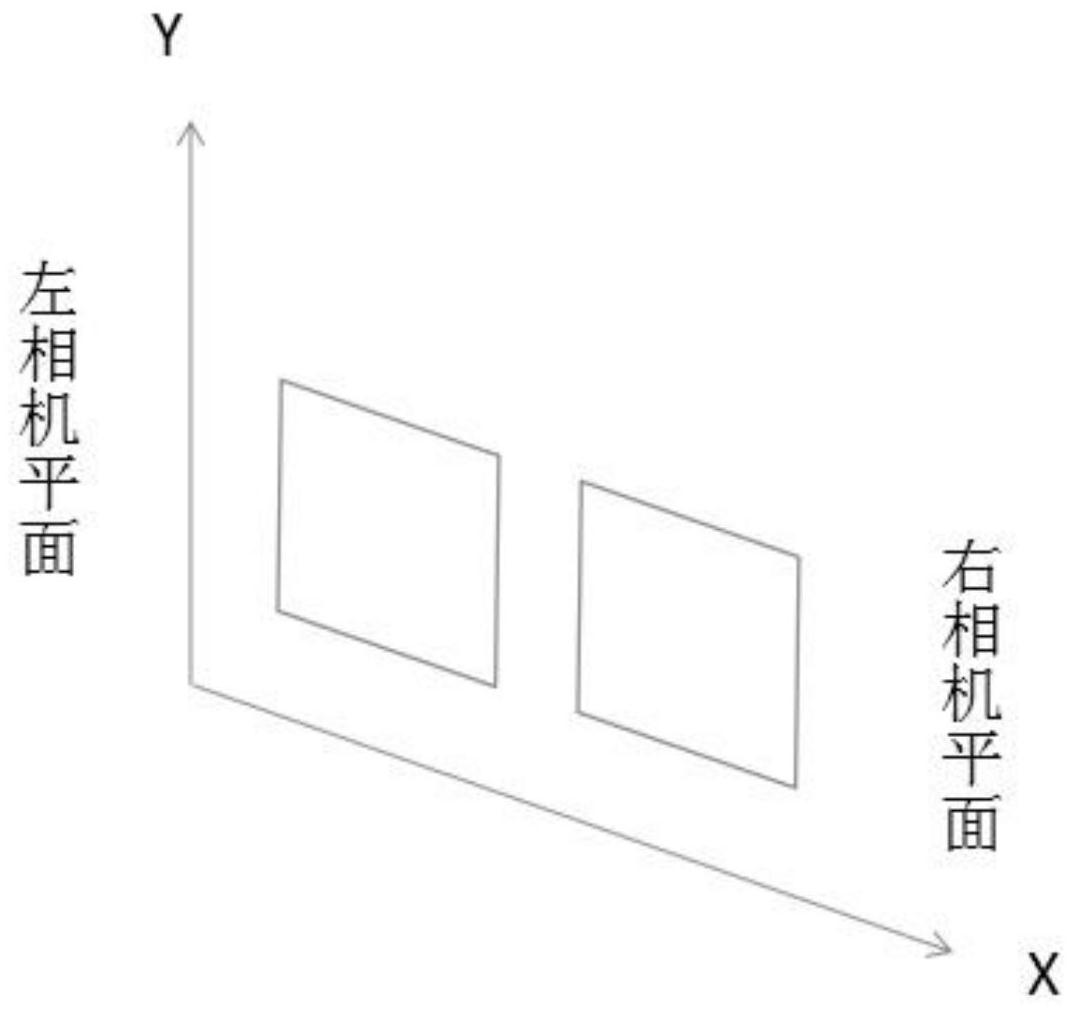
本发明主要考虑到计算机视觉的迅猛发展,目前获取深度信息的方法各色各异, 但是都不能完全解决测距过程中存在的问题。 一种基于不等焦距的双目视觉测距方法,无论是目标处于相机中间还是两侧,该 方法都能够根据测量目标的距离的改变,来改变相机的焦距,使得测量目标在相机图像中 处于一个清晰的状。 本发明解决其技术问题所采用的技术方案包括以下步骤: 将构建的双目测距实验台对着被测目标,获取目标的图像信息,计算物距; 设Xl是被测目标成像在左相机图像中的横坐标,Xr是被测目标成像在右相机图像 中的横坐标,坐标系原点位于相机图像的左上角; D是两个相机光轴之间的水平距离; b1是左相机画面中心点的横坐标,b2是右相机画面中心点的横坐标; 1-1.当目标在两个相机中间时,具体实现如下: 1-1-1 .计算L和R,L为被测目标与左相机光轴之间的水平距离,R为被测目标与右 相机光轴之间的水平距离;设左右相机斜率绝对值分别为kl、kr,则相机斜率绝对值的计算 如下: 根据kl与kr之间的比值关系,确定Xl到Xr之间的水平距离,从而得出L与R: 4 CN 111595292 A 说 明 书 2/4 页 其中,Xl和Xr是可以利用图像处理技术,根据相机获取的图像得出的,所以L和R最 后是已知数; 1-1-2.利用得到的L和R,以及三角形相似原理,计算得出深度信息U: 根据三角形相似,得出: 对公式(5)和(6)化简得: 理论上,U1和U2的值是一样,但由于计算过程中可能会存在些许误差,导致U1和U2 的值存在差异,所以对U1和U2进行平均化,减少计算误差,所以: 1-2.当目标处于相机两侧时,计算方式与目标处于相机中间不同,当目标处于相 机左侧时,具体步骤如下: 1-2-1.利用目标与相机光心连线的斜率来计算L: 然后根据kl和kr来计算L: L*(kl-kr)=kr*(D b1-xl-b2 xr) (12) 将公式(12)化简,得: 由于公式(13)中的所有参数都是已知的,所以L是可以算出具体值的; 1-2-2.根据计算得出的L来计算深度信息U: U=L*kl (14) 同理,目标在两个相机右侧的时候,计算过程相同。 所述的构建双目测距实验台,具体如下: 选取两个不同规格的相机,例如索尼w100和索尼w200,两个相机的焦距分别设为 5 CN 111595292 A 说 明 书 3/4 页 f1和f2;将两个相机并列摆放,且两个相机之间设置有一小段指定距离;两个相机的相机平 面处于同一平面,且两个相机也处于同一水平高度上,如图1所示,构建一个简易的双目测 距实验台。 本发明有益效果如下: 本发明不同于传统的利用两个固定焦距相机的双目测距,它可以在两个相机焦距 不一致的情况下进行双目视觉测距,并且该方法能适用于全部双相机共同视野,适用范围 较大。 附图说明 图1是简易的双目测距实验台的示意图。 图2是目标处于两相机中间情况的获取深度信息原理图 图3是目标处于两相机左侧情况的获取深度信息原理图











