
技术摘要:
本发明公开一种基于实测点云数据的飞机蒙皮窄端面提取方法,包括:获取飞机蒙皮零件实测点云数据;通过栅格化处理将实测点云数据分割成小块的栅格点云数据;对每小块栅格点云数据进行主成分分析,计算平面度,初步地将小块栅格数据中近似平面的栅格点云数据检测出来; 全部
背景技术:
现有三维测量设备已经能够对大型场景复杂零部件进行快速测量,测量时的扫描 速度可达几十万至上百万个点/每秒,同时,扫描精度也有了大幅度的提升。近年来,三维测 量逐渐被应用于航空领域,用来检测飞机制造过程中某些关键零件的制造误差以及零部件 的装配误差。 飞机蒙皮制造和装配精度直接影响飞机的气动性能,因此,对于飞机蒙皮的制造 和装配精度要求极高。飞机蒙皮的窄端面是不同蒙皮之间的装配区域,因此,对于蒙皮窄端 面的提取尤为重要。现有技术中,通过三维测量扫描获取飞机蒙皮零件在装配状态下的实 测点云数据,而针对实测点云数据的平面提取方法大致分为三类:基于聚类分割的方法、基 于霍夫变换的方法和基于RANSAC(RandomSampleConsensus)的方法。其中,基于聚类分割的 方法由于没有较好的终止分割的条件,容易出现欠分割或者过分割的缺点;基于霍夫变换 的方法对于点云数据量大的情况下计算量很大,并且对于飞机蒙皮点云数据的窄端面提取 的效果欠佳;基于RACSAC的方法对于一般尺寸较大的平面识别效果较好,但是对于飞机蒙 皮点云数据的窄端面的提取容易出现假平面。
技术实现要素:
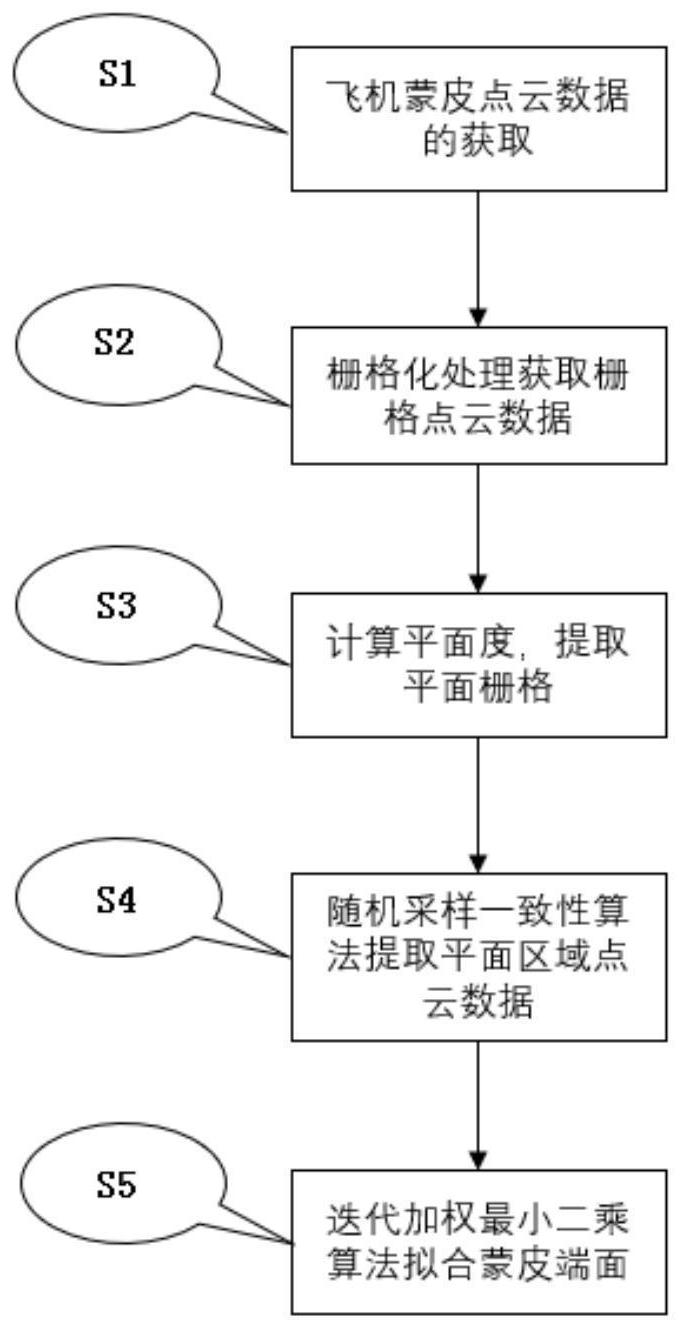
鉴于现有的平面提取方法在飞机蒙皮实测点云数据窄端面提取上存在的缺陷,本 发明提出一种基于实测点云数据的飞机蒙皮窄端面提取方法,该方法除了能够对实测点云 数据中尺寸较大的平面有很好的识别效果外,还能对尺寸较小的窄端面也有很好的识别效 果,解决飞机蒙皮实测点云数据窄端面提取困难的问题。 本发明所采用的技术方案为: 一种基于实测点云数据的飞机蒙皮窄端面提取方法,包括如下步骤: 步骤S1、获取飞机蒙皮零件的实测点云数据; 步骤S2、采用栅格化处理,将实测点云数据分割成若干栅格点云数据; 步骤S3、针对每一栅格点云数据,计算栅格平面度,并通过设置平面度阈值,将平 面栅格提取出来; 步骤S4、通过随机采样一致性算法,将平面栅格中属于同一平面区域的栅格点云 数据提取出来; 步骤S5、采用迭代加权最小二乘算法,对平面区域的点云数据进行拟合,获取最终 平面。 进一步地,步骤S2中,栅格为正立方体,边长设置为点云分辨率的5倍。 进一步地,步骤S3包括: 5 CN 111553909 A 说 明 书 2/6 页 步骤S301、针对每一栅格点云数据,通过公式(1)计算栅格点云的协方差矩阵M; 公式(1)中,k表示栅格点云中所有点的数量,pi表示栅格点云中第i点的坐标,i= 1,2,3……k;pc表示栅格点云的重心坐标: 步骤S302、对协方差矩阵M进行特征值分解,得到特征值λj,其中,j=1,2,3,且λ1< λ2<λ3;计算栅格平面度,平面度计算公式为 平面度阈值设置为0.01,将栅格平面度小于 平面度阈值的栅格提取出来,作为平面栅格。 进一步地,步骤S4具体包括: 步骤S401、将所有的平面栅格点云数据作为随机采样一致性算法的输入,并设置 参数,参数包括: kmax:最大采样次数; Δd:栅格点云重心到平面的距离阈值; Δθ:栅格点云法线与平面法线夹角的阈值; η:概率阈值; th:可以接受的平面点云模型中含有平面栅格的数目; Itmp:临时存储采样过程中共面的栅格点云集合,初始化为空集; num:Itmp中平面栅格的数目,初始化为0; Iout:后续拟合平面的点云集合,初始化为空集; 步骤S402、从平面栅格数据中随机采样1个平面栅格并拟合平面,将采样到的平面 栅格中的点加入到Itmp中; 步骤S403、判断其余未被采样的平面栅格是否在所拟合的平面上,将与已拟合平 面共面的栅格点云加入到Itmp中; 步骤S404、判断Itmp中栅格数目num与th的大小,若num>th,则将num替换th并将 Itmp中数据替换Iout中数据;否则,th和Iout保持原来状态; 步骤S405、使用Iout来重新计算最大采样次数kmax,判断当前采样次数是否大于 kmax,若大于kmax,则执行步骤S406;否则,清空Itmp,重新执行步骤S402至S405; 步骤S406、判断Iout是否为空集,若不是空集,则输出Iout; 步骤S407、将kmax、th、Itmp、num和Iout设置为步骤S401中的状态,不断重复步骤S402 至S406,直到输入的平面栅格全部输出。 进一步地,步骤S401中,kmax初始设置为与平面栅格数目相同,后续不断更新;Δd 设置为点云分辨率的2倍;Δθ设置范围为5°~15°;η设置为99%;th设置为输入平面栅格总 数的10%。 进一步地,步骤S403具体为:判断其余栅格点云重心到所拟合平面的距离d与Δd 之间的大小关系,以及栅格法线与平面法线偏差θ与Δθ之间的大小关系,若d<Δd且θ<Δ θ,则可认为栅格点云与拟合平面共面,将未采样到的栅格点云加入到点集Itmp中。 进一步地,步骤S405中,通过Iout来重新计算最大采样次数kmax的公式为: 6 CN 111553909 A 说 明 书 3/6 页 公式(3)中,N为原始点云中栅格总数,Num为待输出点集Iout中的栅格总数。 进一步地,步骤S5具体包括: 步骤S501、计算点集Iout的基本参数,包括重心和初始法线;设置迭代次数kiter和 终止迭代的条件γ;若相邻两次迭代,拟合的平面法线角度相差的阈值小于γ,则提前结束 迭代;否则,进入步骤S502; 步骤S502、计算点集Iout的加权协方差矩阵C,对C进行特征值分解,以最小特征值 对应的特征向量作为点集Iout的法线;判断相邻两次计算的法线角度偏差值,若偏差小于 γ,则提前结束迭代;否则,继续迭代计算C,直到迭代次数大于kiter; 根据迭代加权最小二乘算法计算出来的法线和输出点集Iout的重心,即可确定拟 合出点集Iout的平面。 进一步地,步骤S502中,通过公式(8)构造加权协方差矩阵C: 公式(8)中,C表示加权协方差矩阵,N表示点集Iout中点的总数,i表示第i个点的序 号,Ri为加权协方差矩阵的构造项;wi为权重因子: 公式(9)中,e表示自然常数,const为一个常量值; 公式(10)中,pi为点集Iout中第i点的坐标,为点集Iout重心坐标,n为点集Iout初始 法线,||·||表示距离; 公式(11)中, 为第l次迭代重心偏移量; 相对于现有技术,本发明的有益效果在于: 本发明对获取的实测点云数据进行栅格化处理,可减少单次处理的数据量,提高 数据处理效率。其次,通过控制栅格尺寸大小,以栅格为单位来处理点云数据,可以避免现 有算法将窄端面区域点云数据视为噪声数据或者将窄端面区域点云数据与尺寸较大的方 向上的点云数据视作为同一平面的数据,从而在平面拟合过程中引起平面提取精度不高, 或者将两个平面拟合成一个平面,出现假平面问题。采用主成分分析计算栅格点云平面度, 通过设置合理的平面度阈值,将小于阈值的栅格提取出来作为平面栅格,能够初步的将点 云数据中平面区域的点云数据提取出来。采用随机采样一致性(RANSAC)算法对所有的平面 栅格进行采样,提取平面栅格中处于同一平面的数据,相比于使用随机一致性采样算法 (RANSAC)直接应用于原始点云数据,对平面栅格采样能够大大减小采样次数,提高算法的 效率。最后使用迭代加权最小二乘算法拟合平面区域数据,提高平面提取的精度。 附图说明 图1为本发明的基于实测点云数据的飞机蒙皮窄端面提取方法的流程框图; 7 CN 111553909 A 说 明 书 4/6 页 图2为扫描获取的飞机蒙皮实测点云数据示意图; 图3为通过随机采样一致性算法提取之后的窄端面区域的点云数据示意图; 图4为通过迭代加权最小二乘算法拟合后的窄端面示意图。











