
技术摘要:
本发明公开了一种基于视觉的钻井平台管柱转运实时监测方法和系统,包括提供了一种基于视觉的钻井平台管柱转运实时监测方法,包括通过视觉传感设备采集监测管柱的实时图像,服务器组对数字图像信息进行处理和分析得到目标管柱的位姿特征和几何特征数据,并发送给控制器 全部
背景技术:
随着石油行业的不断发展,其对石油的质和量都有了更高的要求。因此,相应的在 石油钻井领域,要求更高的效率和更稳定的质量,所以石油钻井作业的自动化成为了发展 的必然趋势。为实现钻井平台的自动化,多种专用设备用于不同的作业环节,替代了人工作 业,提高了作业效率。 但是对于管柱转运作业由于其作业内容的特殊性,需要实现不同环节间管柱的转 运工作,其难以通过传统的单一专用设备实现自动化,因此目前仍需要通过人工作业完成。 而管柱转运作业又在整体作业中占据量很大比重,因此管柱转运的效率对钻井作业效率有 极大影响。所以,采用人工操作的方式会很大程度上限制钻井作业效率的进一步提升。同 时,人工配合转运管柱的劳动强度大,作业环境恶劣,安全风险高,使得发展无人化的自主 管柱转运方式成为了一种必然。 要实现无人化自主转运管柱,需首先实现管柱转运过程的全监测。由于各环节作 业过程各不相同,因此解决通用转运过程自动监测问题,是实现自主管柱转运的关键一环。
技术实现要素:
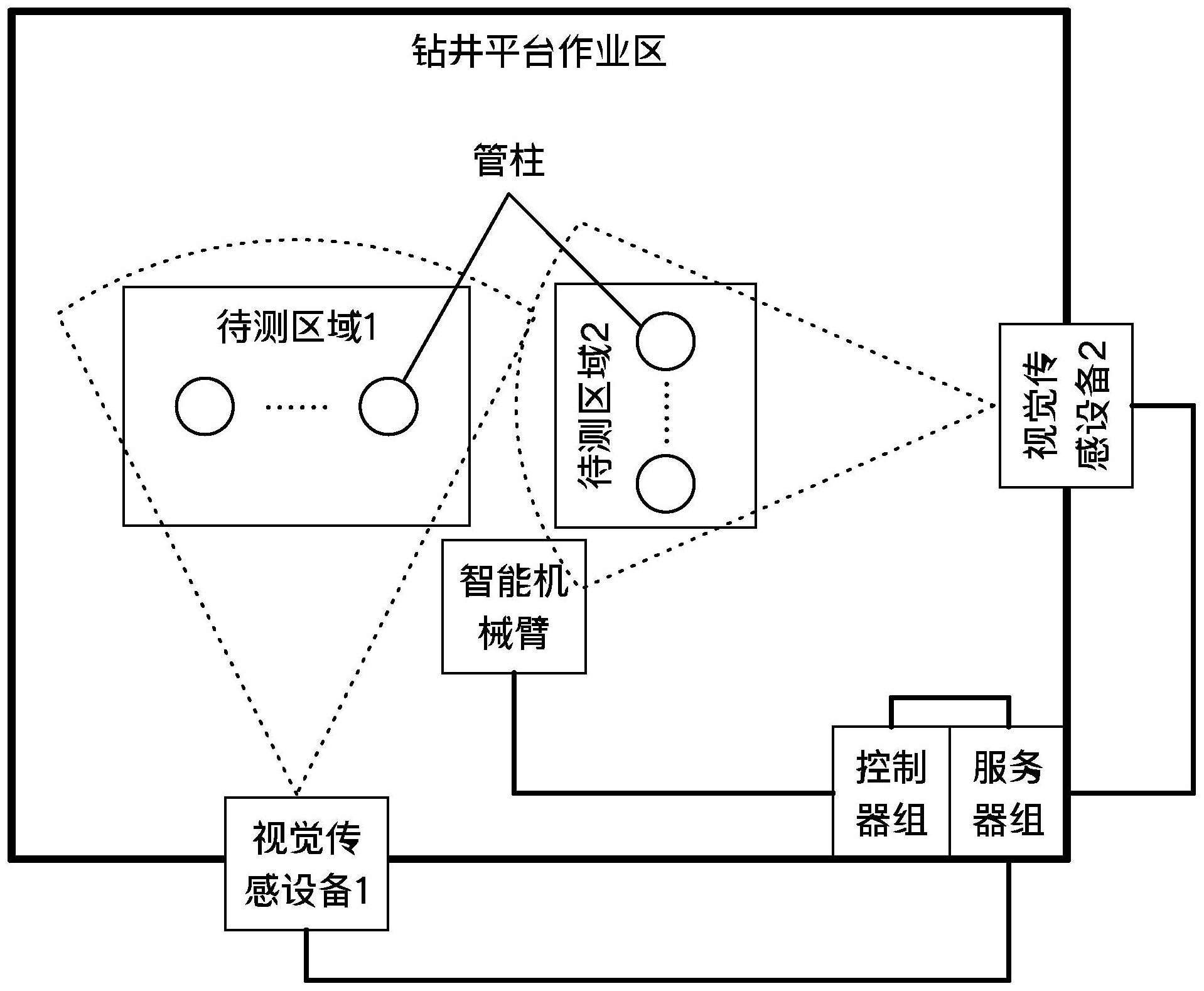
针对现有技术的以上缺陷或改进需求,本发明提供了一种基于视觉的钻井平台管 柱转运实时监测方法和系统,其目的在于通过视觉自主监测智能机械臂转运作业并引导智 能机械臂自主转运管柱,实现钻井平台上管柱转运环节的完全自动化,提升钻井平台作业 效率,由此解决无人化自主管柱转运的技术问题。 为实现上述目的,按照本发明的一个方面,提供了一种基于视觉的钻井平台管柱 转运实时监测方法,包括通过视觉传感设备采集钻井平台待测区域内管柱的实时图像信 息,并转换成所述服务器组能够读取的数字图像,服务器组对数字图像信息进行处理后,反 馈给控制器组,控制器组经过逻辑判断向智能机械臂发出转运动作指令,引导智能机械臂 自主转运管柱,其中: 所述服务器组包括图像数据处理功能模块、转运路径规划功能模块、转运作业监 控功能模块、数据存储功能模块、人机交互功能模块、报警功能模块、数据通信功能模块和 数据可视化功能模块,图像数据处理功能模块与其他模块相连,各个模块之间配合运作,对 视觉传感设备采集到的图像进行处理和分析。 所述控制器组根据钻井平台上管柱的转运情况安排作业顺序,向智能机械臂发出 转运动作指令控制智能机械臂完成实际转运动作,并且控制器组通过服务器组间接控制视 觉传感设备对钻井平台待测区域的监测,同时控制器组与整个钻井平台的系统进行交互。 优选地,服务器组的图像数据处理功能模块还对所述视觉传感设备采集到的管柱 4 CN 111734324 A 说 明 书 2/8 页 数字图像信息进行数据处理得到管柱位姿特征和几何特征参数,用于后续引导智能机械臂 转运管柱的路径规划。 优选地,服务器组内的转运路径规划功能模块能够根据所需转运管柱的几何特 征、位姿特征、转运作业需求及实际作业场景情况对智能机械臂的路径进行优化调整,规划 智能机械臂转运路径。 优选地,服务器组内的转运作业监控功能模块能够在智能机械臂转运管柱的过程 中,实时监测作业场景,跟踪管柱的转运情况并反馈给所述控制器组,控制器组实时更新钻 井平台的作业需求。 优选地,服务器组内的数据存储功能模块实时存储并汇总钻井平台数据,统计管 柱物流情况。 优选地,服务器组内的人机交互功能模块能够人工调控系统设备,对管柱的转运 过程进行人为干预,用于系统调试、故障处理及系统维护工作的进行。 优选地,服务器组内的报警功能模块能够根据转运作业情况分析判断故障情况, 及时报警,并选择系统预设的处理方式,其中: 当转运作业过程中目标管柱的位姿偏离服务器组设置的合理范围时,所述报警功 能模块判断发生设备故障,采取停止转运作业处理方式; 当转运完成后管柱位姿与目标位姿偏差在服务器组设置的容许范围内时,所述报 警功能模块判断发生随机偏差,采取重新规划转运路径处理方式; 当转运完成后管柱位姿与目标位姿偏差超出服务器组设置的容许范围内时,所述 报警功能模块判断发生转运失误,采取停止转运作业或重新规划转运路径处理方式; 当转运过程中管柱位姿大幅度变化时,所述报警功能模块判断发生目标滑动可 能,采取停止转运作业处理方式; 当转运过程中管柱与平台上物体过于接近时,所述报警功能模块判断发生碰撞可 能,采取停止转运作业或重新规划转运路径处理方式。 按照本发明的另一方面,提供了一种基于视觉的钻井平台管柱转运实时监测系 统,包括至少一个视觉传感设备、至少一个智能机械臂、控制器组和服务器组,该系统以控 制器组为中枢,服务器组根据视觉传感设备采集的钻井平台待测区域实时图像获得管柱几 何特征和位姿特征,并将监测数据反馈给控制器组,控制器组根据监测数据引导智能机械 臂完成管柱转运,其中: 所述视觉传感设备与所述服务器组连接,将采集的实时图像传送至所述服务器 组; 所述服务器组与所述控制器组连接,通过各个模块处理获取监测数据并传送至所 述控制器组,同时为所述控制器组提供间接控制所述视觉传感设备的接口,实现所述控制 器间接控制视觉传感设备对钻井平台待测区域的监测; 所述控制器组与所述智能机械臂连接,所述控制器组根据钻井平台上管柱的转运 情况确定转运作业需求,控制智能机械臂完成实际转运任务,同时与整个钻井平台的控制 系统连接,实现协同工作; 所述控制器组与所述服务器组设置在钻井平台非作业区。 优选地,视觉传感设备设置在钻井平台边缘,实时监测管柱的变化情况,视觉传感 5 CN 111734324 A 说 明 书 3/8 页 设备完全覆盖监测钻井平台上所有管柱的转运状况。 优选地,钻井平台上设置有智能机械臂的运动导轨,智能机械臂接受到服务器组 发出的运送动作指令后,在运动导轨上执行运送动作指令。 总体而言,通过本发明所构思的以上技术方案与现有技术相比,具有如下有益效 果:使用视觉监测方式满足了管柱转运过程中柔性监测的需求,并结合智能机械臂技术,将 监测到的钻井平台图像数据用于引导机械臂的自主转运作业,实现了钻井平台上管柱转运 作业的自动化和智能化,使得钻井平台自动化程度和作业效率进一步提升。 附图说明 图1是本发明实施例提供的基于视觉的石油钻井平台自动管柱监测转运系统的布 局方式; 图2是本发明实施例提供的基于视觉的石油钻井平台自动管柱监测转运系统的体 系框架; 图3是本发明实施例提供的石油钻井平台转运机械臂的结构示意; 图4是本发明实施例提供的目标管柱位姿的视觉监测方式的流程; 图5是本发明实施例中所需转运管柱的结构示意图; 图6是本发明实施例中动力猫道的结构示意图; 图7是本发明实施例中钻杆盒的结构示意图。











