
技术摘要:
本发明提供了一种堆垛机器人夹持式末端执行器及夹持方法,属于木工家具生产流水线技术领域。堆垛机器人夹持式末端执行器的承重板上设有夹持机构,夹持机构包括两个相对移动的夹持部,双输出轴电动机的两个驱动轴经联轴器通过梯形螺杆与夹持机构的夹持部相连,双输出轴 全部
背景技术:
现代木工木门生产流水线作业时,经常需要对木门等板材进行转移生产平台、平 移搬运等操作。现有工厂的末端执行器无法针对多种规格尺寸、重型的木门等相关板材进 行有效搬运,或者低效率、低成本地进行的堆垛。
技术实现要素:
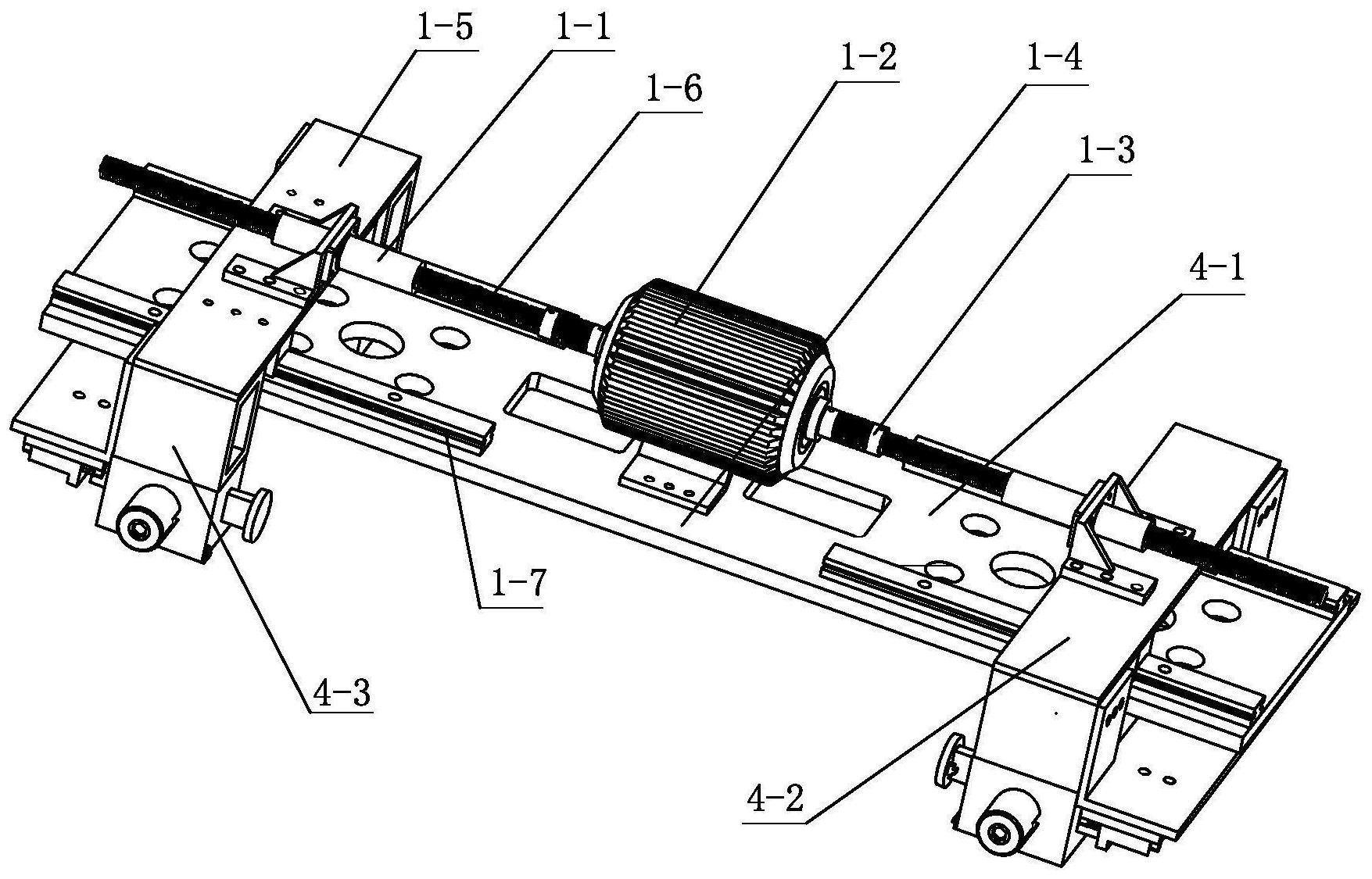
本发明针对以上问题,设计出一种能够适用于多种规格尺寸、重载的堆垛机器人 夹持式末端执行器,大大解决了堆垛效率低、成本昂贵、危险性强等缺点,提高了流水生产 线作业的效率。 本发明采用如下技术方案: 本发明所述的堆垛机器人夹持式末端执行器,包括承重板,梯形螺杆,夹持机构,双输 出轴电动机;所述的承重板上设有夹持机构,夹持机构包括两个相对移动的夹持部,双输出 轴电动机的两个驱动轴经联轴器通过梯形螺杆与夹持机构的夹持部相连,双输出轴电动机 驱动夹持机构的夹持部向承重板中心处收拢或远离;夹持机构的夹持部在收拢状态下处于 夹持状态,夹持机构的夹持部在分离状态下向处于释放状态。 本发明所述的堆垛机器人夹持式末端执行器,所述的双输出轴电动机布置在承重 板的中心处;位于梯形螺杆同向延伸的承重板上端面分别设有供夹持机构中夹持部滑动的 水平导轨,夹持机构中的两个夹持部沿水平导轨延伸方向滑动。 本发明所述的堆垛机器人夹持式末端执行器,所述的夹持部包括用于安装螺杆套 筒的支撑架,梯形螺杆贯穿螺杆套筒彼此通过螺纹相互配合;支撑架布置于横板上,横板横 跨承重板,横板的长度大于承重板的宽度,沿横板的长度方向两端通过支撑板向下设有底 座,底座内设有夹紧杆,夹紧杆延伸出底座的两侧端面,底座的一侧设有液压缸支撑板,液 压缸支撑板上设有双作用液压缸,双作用液压缸驱动端一侧经滚轮与夹紧杆的一端相连, 夹紧杆的另一端设有橡胶垫,双作用液压缸的驱动端驱动夹紧杆伸缩。 本发明所述的堆垛机器人夹持式末端执行器,所述的底座内具有供夹紧杆滑动的 夹紧腔,还设有放置斜头推杆的推杆腔,推杆腔垂直于夹紧腔且相互贯通;所述的斜头推杆 的一端与回位弹簧相连,斜头推杆的另一端为斜头面,夹紧杆的杆体上设有与斜头推杆相 互配合的倾斜面;通过回位弹簧将斜头推杆的斜头面与夹紧杆相互抵触。 本发明所述的堆垛机器人夹持式末端执行器,所述的双作用液压缸与底座之间设 4 CN 111604930 A 说 明 书 2/4 页 有转向块,转向块通过圆柱导轨与承重板相连,转向块沿圆柱导轨延伸方向滑动,双作用液 压缸的驱动端设有滚轮,转向块与滚轮相接触,转向块与滚轮的接触面为弧形面。 本发明所述的堆垛机器人夹持式末端执行器,所述的底座面向橡胶垫的一端面设 有距离传感器,橡胶垫面向底座的一端面设有压力传感器。 本发明所述的堆垛机器人夹持式末端执行器的夹持方法,步骤如下: 步骤一、板材经传送带传送到夹持式末端执行器正下方,夹持机构上的距离传感器测 量板材与夹紧杆之间的距离;并将测得的信号传递给外部的PLC控制器; 步骤二、PLC控制器收到反馈信号后,驱动双输出轴电动机调节夹持机构中夹持部之间 距离; 步骤二、PLC控制器继续驱动双作用液压缸推动活塞杆向外输出压力,推动着夹紧杆夹 紧板材; 步骤三、夹紧杆继续向内运动后,夹紧杆上的橡胶垫和压力传感器便开始与板材进行 接触,双作用液压缸因保压作用使得输出的力保持不变,完成夹持工作; 步骤四、当堆垛机器人将板材搬运到合适的位置时,PLC控制器发出指令,双作用液压 缸活塞杆退回,夹紧杆与转向块在回位弹簧作用下恢复至初始位置,将夹持的位置调整到 预先设定的最初夹持点,进行下一次的堆垛工作。 本发明所述的堆垛机器人夹持式末端执行器的夹持方法,所述的步骤二中距离传 感器测量板材和夹紧杆之间的距离为3cm后,将信号传递至PLC控制器,PLC控制器控制双输 出轴电动机停止转动,此时梯形螺杆自锁,以保证定位后的夹持位置。 本发明所述的堆垛机器人夹持式末端执行器的夹持方法,所述的步骤三中夹紧杆 继续向内运动后,压力传感器与板材进行接触,当夹持力达到500N时,压力传感器开始工 作,将测量的实时夹持力返回至PLC控制器并与预定值进行实时对比;当达到预定值时,PLC 控制器控制双作用液压缸输出的力保持不变,完成夹持工作,若压力传感器测量的力大于 1250N时,发出信号给PLC控制器报警。 有益效果 本发明提供的堆垛机器人夹持式末端执行器利用双输出轴电动机、联轴器、梯形螺杆 实现对板材位置的快速定位,双输出轴电动机的动作迅速,可以精确运行;梯形螺杆在定位 完成后可以反向自锁,防止位置移动。 本发明提供的堆垛机器人夹持式末端执行器利用双作用液压缸、转向块、斜头推 杆和夹紧杆等机械结构,可以控制夹持力,适合于中、重载等不同工作环境。 本发明提供的堆垛机器人夹持式末端执行器,利用回位弹簧Ⅱ和回位弹簧Ⅰ的配 合,可以在夹持结束时将夹紧杆实时的跟踪双作用液压缸的活塞杆,避免夹紧杆不回缩给 压力传感器带来的错误信号,影响系统工作。 附图说明 图1是本发明的夹持器末端执行器的总装等轴测视图; 图2(a)是本发明的夹持式末端执行器的总装下视图; 图2(b)是图2(a)中A处放大示意图; 5 CN 111604930 A 说 明 书 3/4 页 图3是本发明的底座剖视图; 图4是本发明的夹持流程图; 图中1-1-螺杆套筒;1-2-双输出轴电动机;1-3-电机支撑架;1-4-联轴器;1-5-支撑架; 1-6-梯形螺杆;1-7-水平导轨;2-1-底座;2-2-回位弹簧Ⅰ;2-3-斜头推杆;2-4-夹紧杆;2-5 距离传感器;2-6-橡胶垫;2-7-压力传感器;3-1-双作用液压缸;3-2-滚轮;3-3-转向块;3- 4-圆柱导轨;3-5-回位弹簧Ⅱ;4-1-承重板;4-2-横板;4-3-支撑板。











